
Journal of Systems Engineering and Electronics ›› 2021, Vol. 32 ›› Issue (1): 228-242.doi: 10.23919/JSEE.2021.000020
• CONTROL THEORY AND APPLICATION • Previous Articles Next Articles
Guangbin CAI1,2,*( ), Yushan ZHAO1(), Yang ZHAO1(), Changhua HU1()
), Yushan ZHAO1(), Yang ZHAO1(), Changhua HU1()
Received:2019-08-21
Online:2021-02-25
Published:2021-02-25
Contact:
Guangbin CAI
E-mail:cgb0712@163.com;17792630436@163.com;zy940116@126.com;hch66603@163.com
About author:Supported by:Guangbin CAI, Yushan ZHAO, Yang ZHAO, Changhua HU. Consensus of multi-vehicle cooperative attack with stochastic multi-hop time-varying delay and actuator fault[J]. Journal of Systems Engineering and Electronics, 2021, 32(1): 228-242.
Add to citation manager EndNote|Reference Manager|ProCite|BibTeX|RefWorks

Fig 1
Switching topologies"
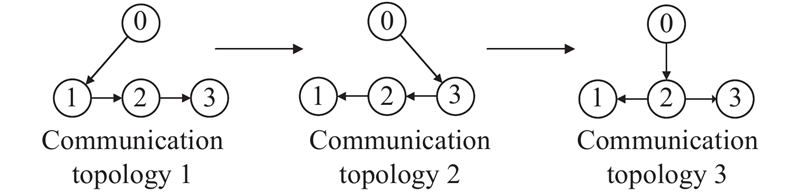
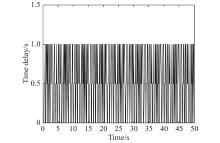
Fig 2
Stochastic single-hop time-varying delay"
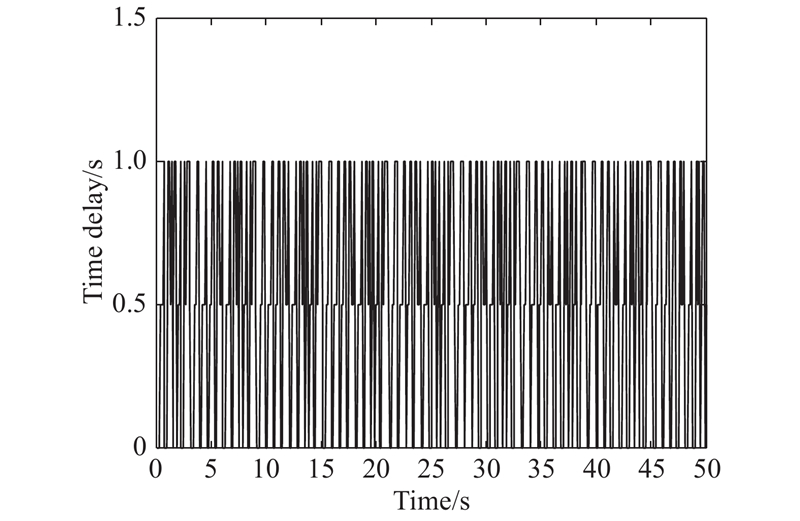
Table 1
Initial state of each vehicle"
| Index number of vehicle | Velocity along x-axis/ (m/s) | Position along x-axis/ km | Velocity along y-axis/ (m/s) | Position along y-axis/ km | Velocity along z-axis/ (m/s) | Position along z-axis/ km |
| 0 | 190 | 10 | 290 | 20 | 390 | 40 |
| 1 | 192 | 9.8 | 288 | 19.9 | 392 | 40.2 |
| 2 | 191 | 9.98 | 287 | 20.01 | 388 | 39.88 |
| 3 | 191 | 10.2 | 291 | 20.1 | 391 | 39.98 |
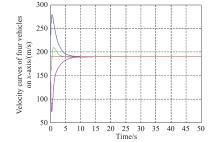
Fig 3
Velocity states on x-axis "
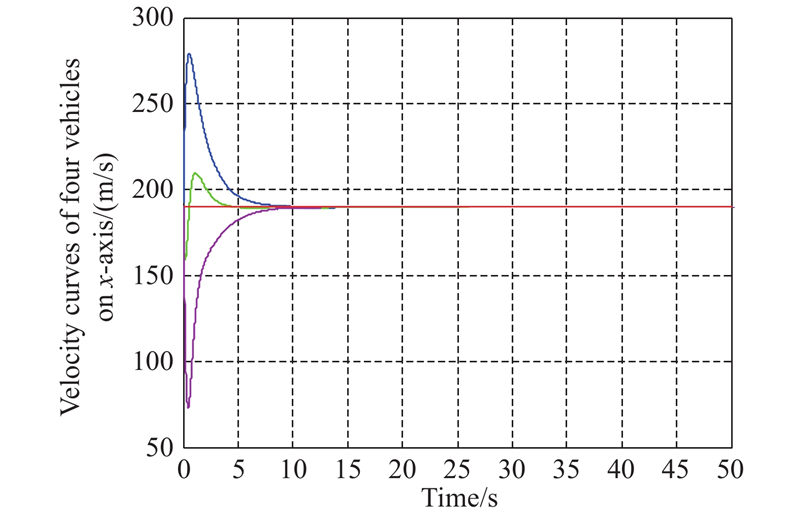
Fig 4
Velocity states on y-axis "
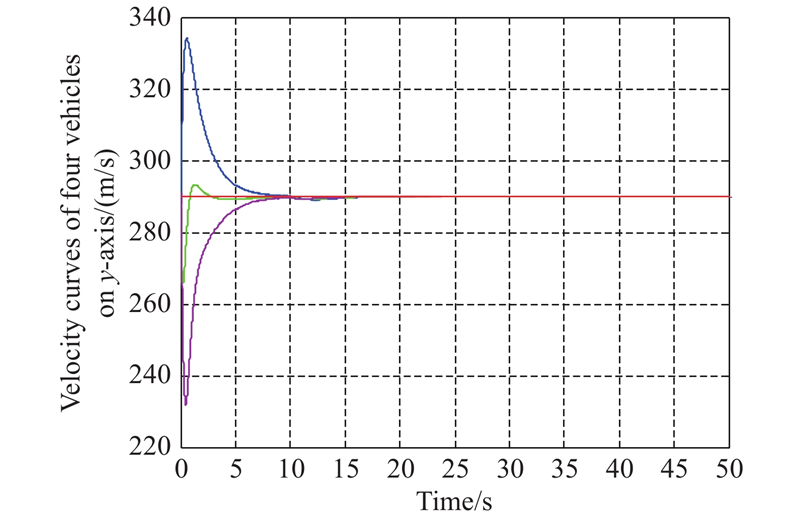
Fig 5
Velocity states on z-axis "
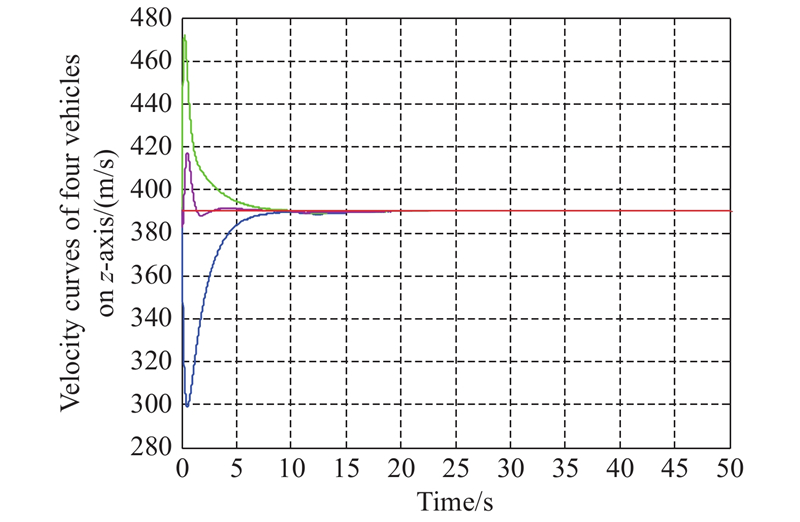
Fig 6
Trajectories of four vehicles in 3-D space"
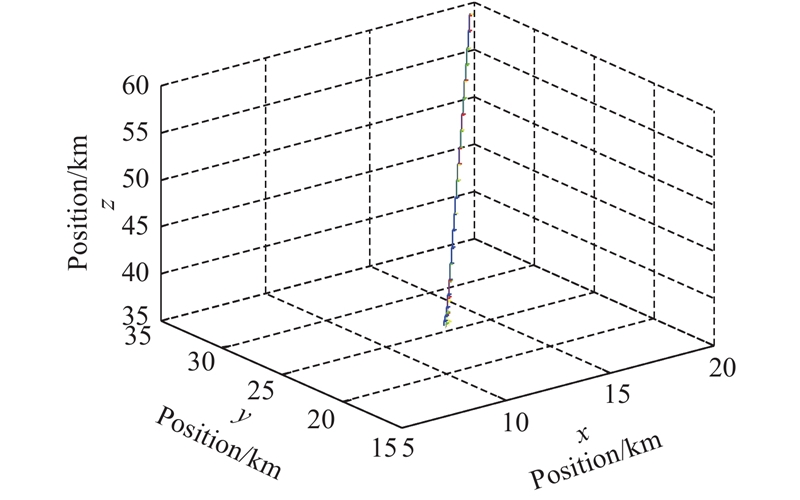
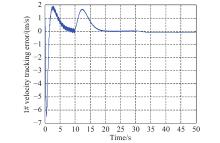
Fig 7
Velocity tracking error between vehicle 1 and vehicle 0"
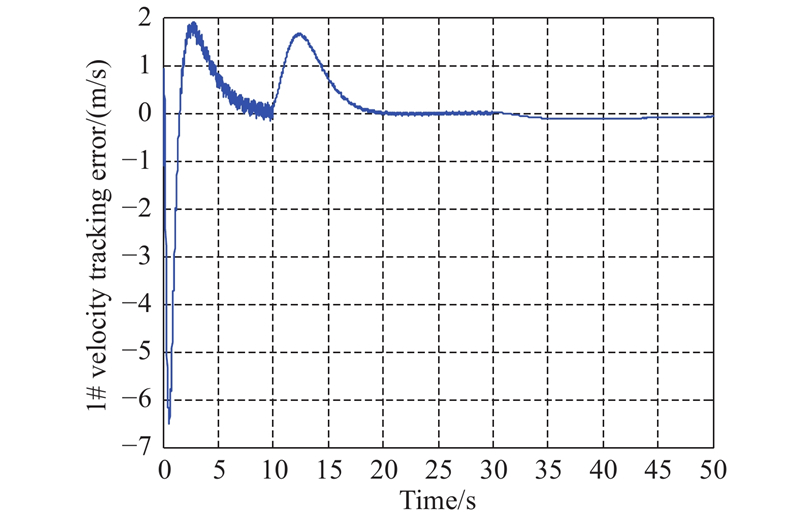
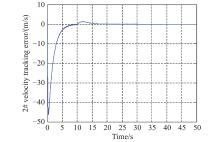
Fig 8
Velocity tracking error between vehicle 2 and vehicle 0"
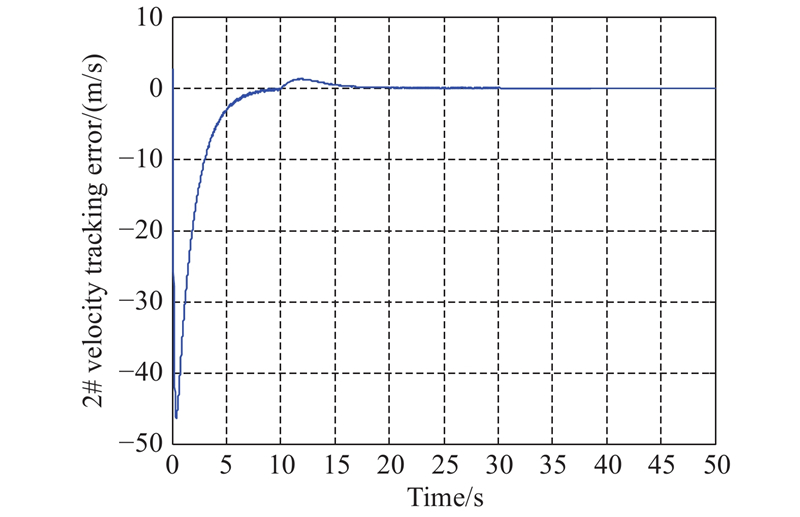
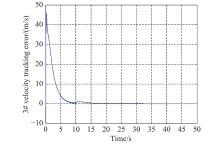
Fig 9
Velocity tracking error between vehicle 3 and vehicle 0"
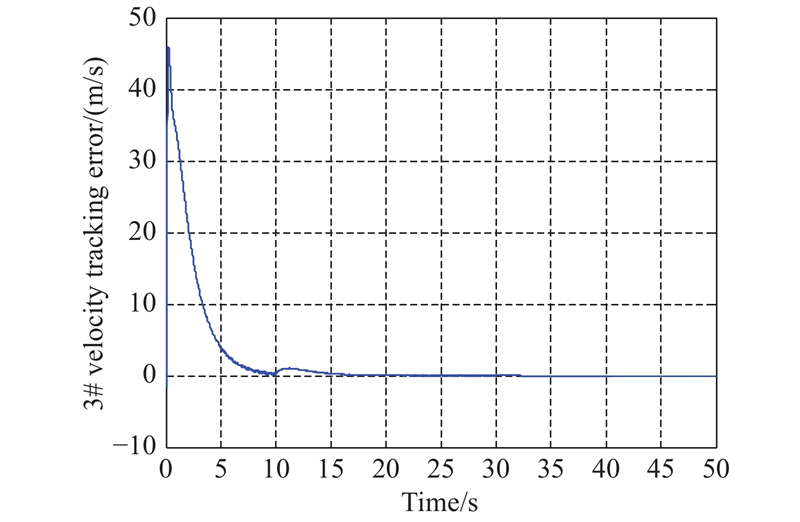
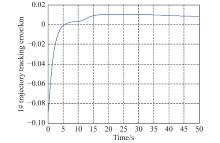
Fig 10
Trajectory tracking error between vehicle 1 and vehicle 0"
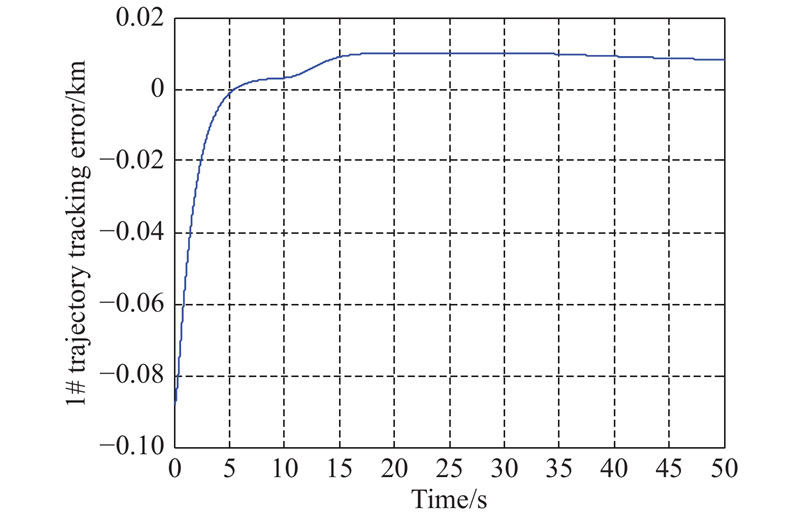
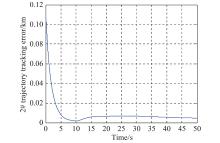
Fig 11
Trajectory tracking error between vehicle 2 and vehicle 0"
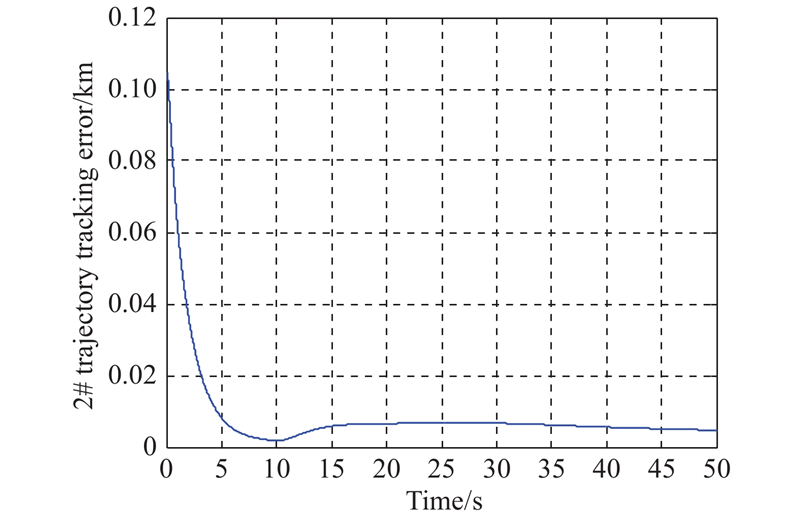
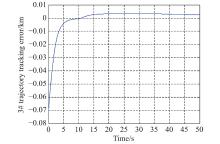
Fig 12
Trajectory tracking error between vehicle 3 and vehicle 0"
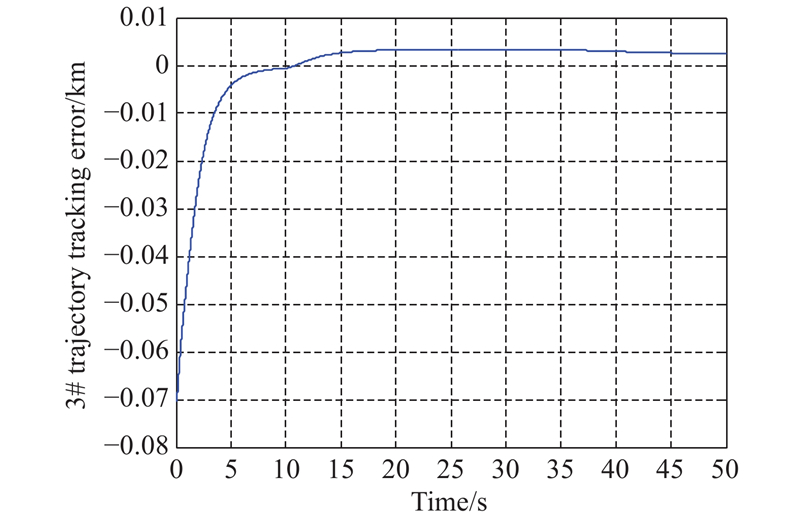
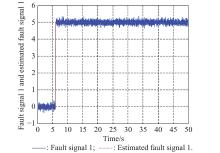
Fig 13
Fault signal 1 and estimated fault signal 1"
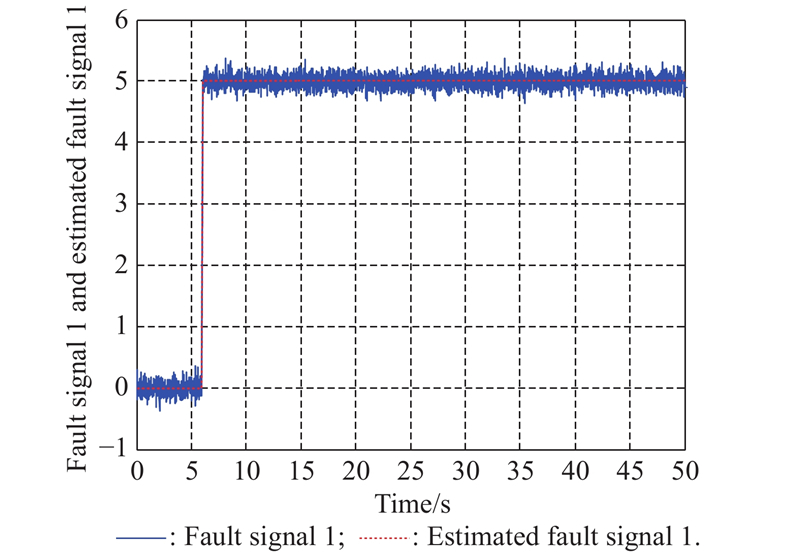
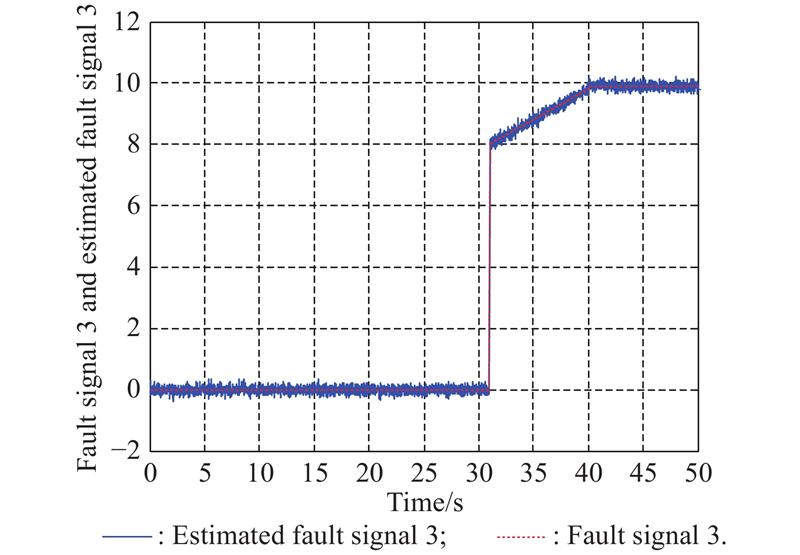
Fig 14
Fault signal 3 and estimated fault signal 3"
| 1 |
XU X G, WEI ZY, REN Z, et al Time-varying fault-tolerant formation tracking based cooperative control and guidance for multiple cruise missile systems under actuator failures and directed topologies. Journal of Systems Engineering and Electronics, 2019, 30 (3): 587- 600.
doi: 10.21629/JSEE.2019.03.16 |
| 2 |
WEI J, FANG H J Multi-agent consensus with time-varying delays and switching topologies. Journal of Systems Engineering and Electronics, 2014, 25 (3): 489- 495.
doi: 10.1109/JSEE.2014.00056 |
| 3 | XI J X, WANG C, LIU H, et al. Completely distributed guaranteed-performance consensualization for high-order multiagent systems with switching topologies. IEEE Trans. on Systems, Man, and Cybernetics: Systems, 2018, 49(7): 1338–1348. |
| 4 | WANG H, XU X, FANG Y Networked cooperative attack ammunition technology. Acta Armamentarii, 2010, S2. |
| 5 | CUI Y, REN J, DU W C, et al UAV target tracking algorithm based on task allocation consensus. Journal of Systems Engineering and Electronics, 2016, 27 (6): 1207- 1218. |
| 6 | ZHAO Y S, HU C H, CAI G B, et al Consensus of leader-follower multi-warhead networked cooperative attack with stochastic multi-step time-varying delay. Proc. of the 36th China Control Conference, 2017, 1607- 1613. |
| 7 | CAI G B, YAN J, ZHAO Y S, et al Consensus of MVCA with switching topology and stochastic fault. Proc. of the IEEE Chinese Automation Congress, 2017, 6043- 6049. |
| 8 | XI J X, WANG C, LIU H, et al Dynamic output feedback guaranteed-cost synchronization for multiagent networks with given cost budgets. IEEE Access, 2018, 6, 28923- 28935. |
| 9 |
LI J Y, CHEN G, DONG Z Y, et al Distributed mirror descent method for multi-agent optimization with delay. Neurocomputing, 2016, 177, 643- 650.
doi: 10.1016/j.neucom.2015.12.017 |
| 10 | WANG Q, HOU D L, LI J, et al Consensus analysis of multi-missile decentralized cooperative guidance time with time-delays and topologies uncertainty. Acta Armamentarii, 2014, 35 (7): 982- 989. |
| 11 |
LI Y J, TAN C, LIU G P Output consensus of networked multi-agent systems with time-delay compensation scheme. Journal of the Franklin Institute, 2016, 353 (4): 917- 935.
doi: 10.1016/j.jfranklin.2016.01.008 |
| 12 |
LIU X Y, DOU L H, SUN J Consensus for networked multi-agent systems with unknown communication delays. Journal of the Franklin Institute, 2016, 353 (16): 4176- 4190.
doi: 10.1016/j.jfranklin.2016.08.005 |
| 13 |
WANG X, SABERI A, STOORVOGEL A A, et al Consensus in the network with uniform constant communication delay. Automatica, 2013, 49 (8): 2461- 2467.
doi: 10.1016/j.automatica.2013.04.023 |
| 14 |
LU M B, HUANG J Cooperative output regulation problem for linear time-delay multi-agent systems under switching network. Neurocomputing, 2016, 190, 132- 139.
doi: 10.1016/j.neucom.2016.01.025 |
| 15 |
WANG Z H, YOU K Y, XU J J, et al Consensus design for continuous-time multi-agent systems with communication delay. Journal of Systems Science and Complexity, 2014, 27 (4): 701- 711.
doi: 10.1007/s11424-014-3334-z |
| 16 |
YANG X, WANG J Z, TAN Y Robustness analysis of leader-follower consensus for multi-agent systems characterized by double integrators. Systems and Control Letters, 2012, 61 (11): 1103- 1115.
doi: 10.1016/j.sysconle.2012.08.003 |
| 17 |
XIA H, HUANG T Z, SHAO J L, et al Group consensus of multi-agent systems with communication delays. Neurocomputing, 2016, 171, 1666- 1673.
doi: 10.1016/j.neucom.2015.07.108 |
| 18 |
YANG H, YOU X, HUA C Attitude tracking control for spacecraft formation with time-varying delays and switching topology. Acta Astronautica, 2016, 126, 98- 108.
doi: 10.1016/j.actaastro.2016.04.012 |
| 19 |
QIAO W, SIPAHI R Delay-dependent coupling for a multi-agent LTI consensus system with inter-agent delays. Physica D: Nonlinear Phenomena, 2014, 267, 112- 122.
doi: 10.1016/j.physd.2013.10.001 |
| 20 |
JI L H, LIAO X F Consensus problems of first-order dynamic multi-agent systems with multiple time delays. Chinese Physics B, 2013, 22 (4): 040203.
doi: 10.1088/1674-1056/22/4/040203 |
| 21 |
WANG Z M, WANG W, ZHANG H S Robust consensus for linear multi-agent systems with noises. IET Control Theory and Applications, 2016, 10 (17): 2348- 2356.
doi: 10.1049/iet-cta.2016.0191 |
| 22 |
MA H J, YANG G H Adaptive fault tolerant control of cooperative heterogeneous systems with actuator faults and unreliable interconnections. IEEE Trans. on Automatic Control, 2016, 61 (11): 3240- 3255.
doi: 10.1109/TAC.2015.2507864 |
| 23 | WANG W, WANG D, PENG Z H Fault-tolerant control for synchronization of uncertain nonlinear multiagent systems. Control and Decision, 2015, 30 (7): 1303- 1308. |
| 24 |
YANG Y, YUE D Distributed adaptive fault-tolerant control of pure-feedback nonlinear multi-agent systems with actuator failures. Neurocomputing, 2017, 221, 72- 84.
doi: 10.1016/j.neucom.2016.09.061 |
| 25 | FENG Z, HU G Q Distributed fault identification and fault-tolerant control for multi-agent systems. Proc. of the 33rd IEEE Chinese Control Conference, 2014, 1476- 1481. |
| 26 |
CHEN S, HO D W C, LI L, et al Fault-tolerant consensus of multi-agent system with distributed adaptive protocol. IEEE Trans. on Cybernetics, 2015, 45 (10): 2142- 2155.
doi: 10.1109/TCYB.2014.2366204 |
| 27 | KHALIL H K. Nonlinear systems. New Jersey: Prentice-Hall, 1996. |
| 28 | ZHAO Y S, HU C H, HOU M Z, et al Modeling and output consensus of cooperative attack for leader-followers multiple warheads. Journal of Harbin Institute of Technology, 2018, 50 (10): 95- 103. |
| 29 | CAI G B, YAN J, ZHAO Y S, et al Attitude consensus of multi-spacecraft cooperative formation with stochastic multi-hop time-varying delay. Control Theory & Applications, 2018, 35 (10): 1415- 1421. |
| [1] | Steven Xianchuan DING, Linlin LI, Bin JIANG. Unified control and detection framework and its applications: a review, some new results, and future perspectives [J]. Journal of Systems Engineering and Electronics, 2021, 32(5): 995-1013. |
| [2] | Yuanyuan TU, Dayi WANG, Wenbo LI. Reconfigurability evaluation method for input-constrained control systems [J]. Journal of Systems Engineering and Electronics, 2021, 32(5): 1023-1030. |
| [3] | Sader MALIKA, Fuyong WANG, Zhongxin LIU, Zengqiang CHEN. Distributed fuzzy fault-tolerant consensus of leader-follower multi-agent systems with mismatched uncertainties [J]. Journal of Systems Engineering and Electronics, 2021, 32(5): 1031-1040. |
| [4] | Ziquan YU, Youmin ZHANG, Bin JIANG. PID-type fault-tolerant prescribed performance control of fixed-wing UAV [J]. Journal of Systems Engineering and Electronics, 2021, 32(5): 1053-1061. |
| [5] | Kun Zhang and Xiaoguang Gao. Distributed tracking control of unmanned aerial vehicles under wind disturbance and model uncertainty [J]. Journal of Systems Engineering and Electronics, 2016, 27(6): 1262-1271. |
| [6] | Jia Wei and Huajing Fang. Multi-agent consensus with time-varying delays and switching topologies [J]. Journal of Systems Engineering and Electronics, 2014, 25(3): 489-495. |
| [7] | Yinqiu Wang, Qinghe Wu, Yao Wang, and Di Yu. Consensus algorithm for multiple quadrotor systems under fixed and switching topologies [J]. Journal of Systems Engineering and Electronics, 2013, 24(5): 818-827. |
| [8] | Haibin Sun, Shihua Li, and Changyin Sun. Adaptive fault-tolerant controller design for airbreathing hypersonic vehicle with input saturation [J]. Journal of Systems Engineering and Electronics, 2013, 24(3): 488-. |
| [9] | Chenglin Liu, Fei Liu. Consensus problem of second-order multi-agent systems with time-varying communication delay and switching topology [J]. Journal of Systems Engineering and Electronics, 2011, 22(4): 672-678. |
| [10] | Yufei Xu, Bin Jiang, Zhifeng Gao, and Ke Zhang. Fault tolerant control for near space vehicle: a survey and some new results [J]. Journal of Systems Engineering and Electronics, 2011, 22(1): 88-94. |
| [11] | Xiaodong Han1, 2,*, Jiangong Liu1, Dexiao Xie2, Dengfeng Zhang2, and Zhiquan Wan. Robust H∞ guaranteed cost satisfactory fault-tolerant control for discrete-time systems with quadratic D stabilizability [J]. Journal of Systems Engineering and Electronics, 2010, 21(3): 496-502. |
| [12] | Meng Lingya & Jiang Bin. Backstepping-based active fault-tolerant control for a class of uncertain SISO nonlinear systems? [J]. Journal of Systems Engineering and Electronics, 2009, 20(6): 1263-1270. |
| [13] | Huo Zhihong, Zhang Zhixue & Fang Huajing. Research on fault-tolerant control of networked control systems based on information scheduling [J]. Journal of Systems Engineering and Electronics, 2008, 19(5): 1024-1028. |
| [14] | Chen Xueqin, Geng Yunhai, Zhang Yingchun & Wang Feng. Fault-tolerant control of linear uncertain systems using H∞ robust predictive control [J]. Journal of Systems Engineering and Electronics, 2008, 19(3): 571-577. |
| [15] | Cui Ping, Weng Zhengxin, Patton Ron. Novel active fault-tolerant control scheme and its application to a double inverted pendulum system [J]. Journal of Systems Engineering and Electronics, 2008, 19(1): 134-140. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||