
Journal of Systems Engineering and Electronics ›› 2024, Vol. 35 ›› Issue (2): 444-450.doi: 10.23919/JSEE.2024.000038
• CONTROL THEORY AND APPLICATION • Previous Articles Next Articles
Qingrui MENG1( ), Yan LIN2,*()
), Yan LIN2,*()
Received:2023-12-19
Accepted:2024-02-23
Online:2024-04-18
Published:2024-04-18
Contact:
Yan LIN
E-mail:mengqingrui@buaa.edu.cn;linyan@buaa.edu.cn
About author:Supported by:Qingrui MENG, Yan LIN. Adaptive admittance tracking control for interactive robot with prescribed performance[J]. Journal of Systems Engineering and Electronics, 2024, 35(2): 444-450.
Add to citation manager EndNote|Reference Manager|ProCite|BibTeX|RefWorks
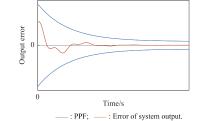
Fig 1
An illustrative example demonstrating PPF"
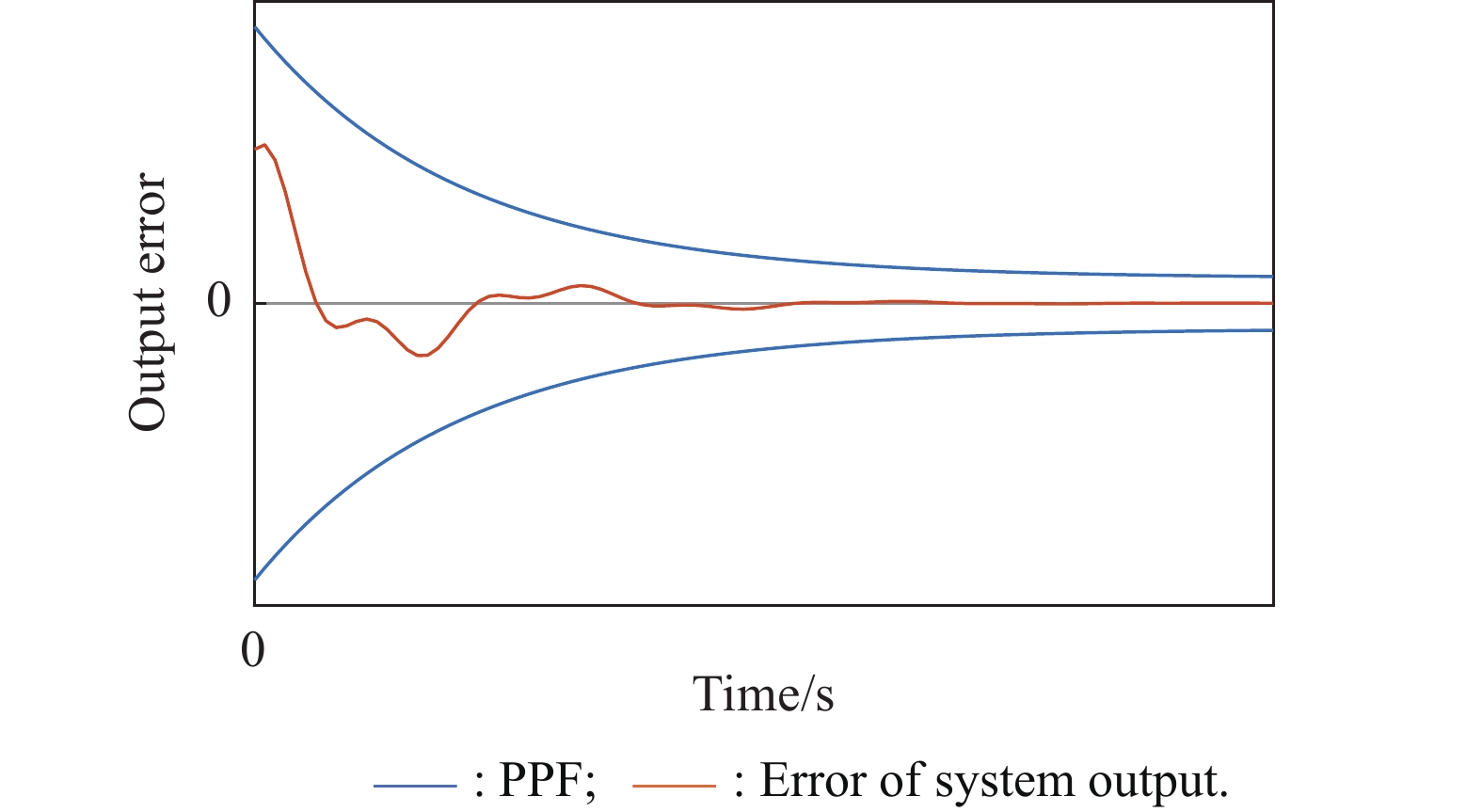
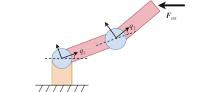
Fig 2
Interactive manipulator robot"
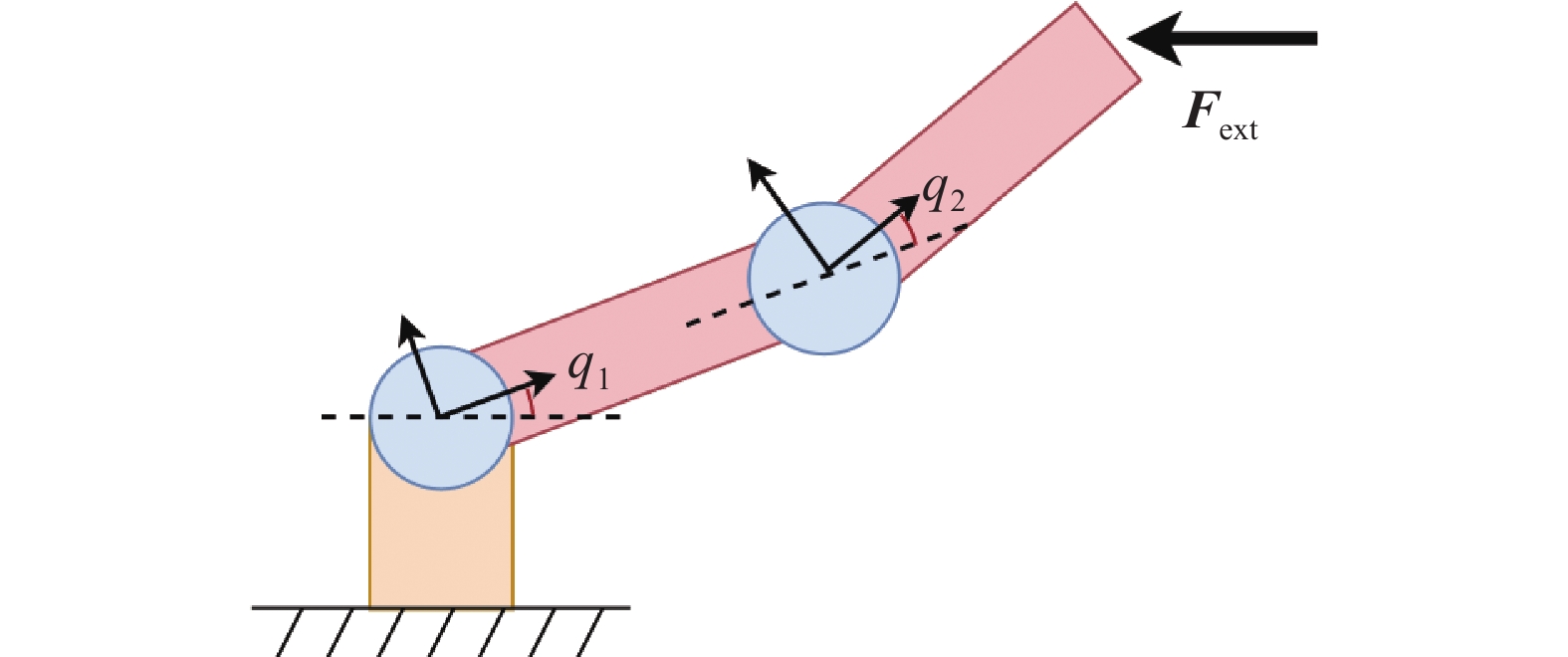
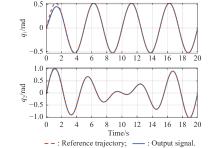
Fig 3
Joint angles"
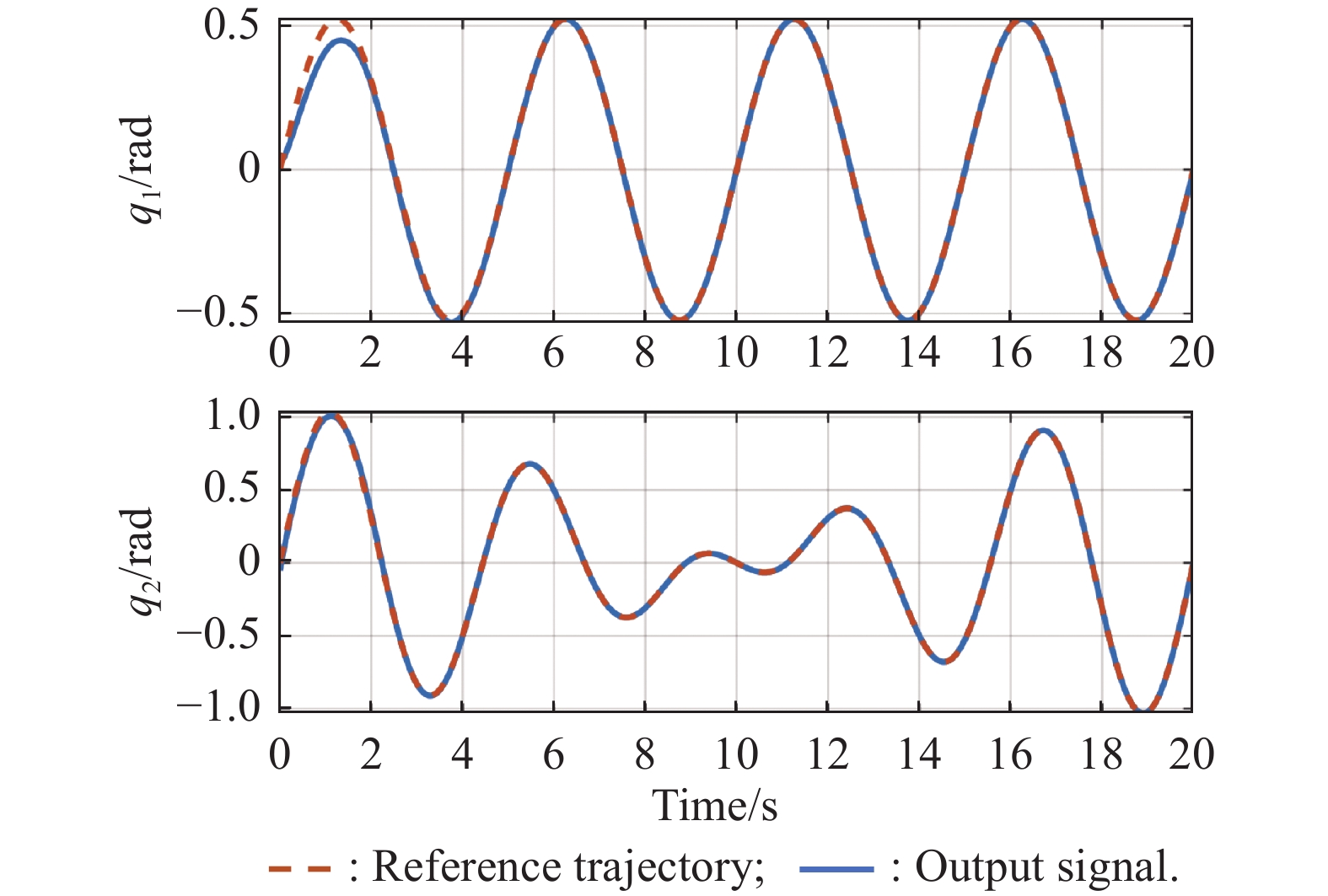

Fig 4
PPFs and tracking errors ε"
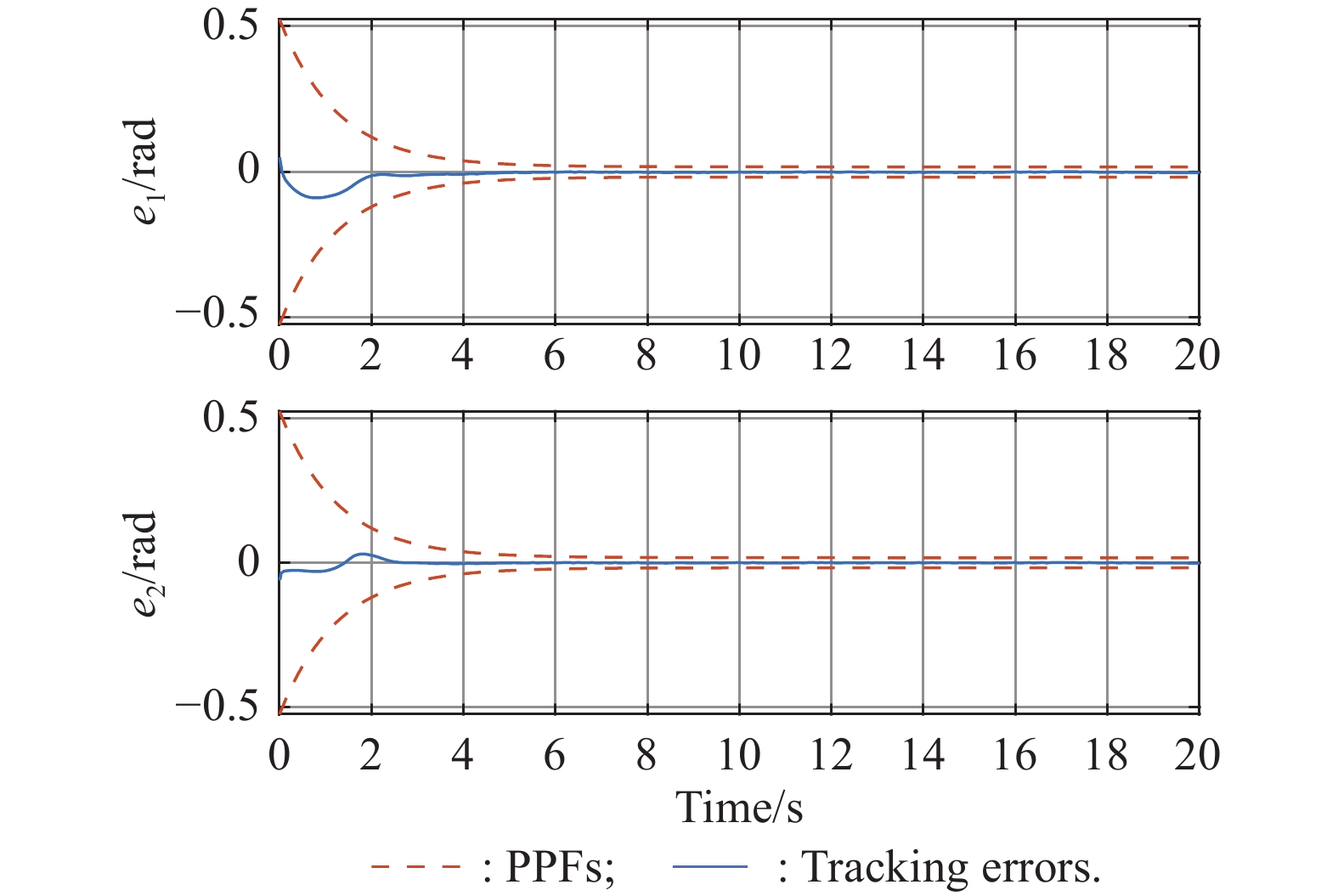
Fig 5
Control signals"
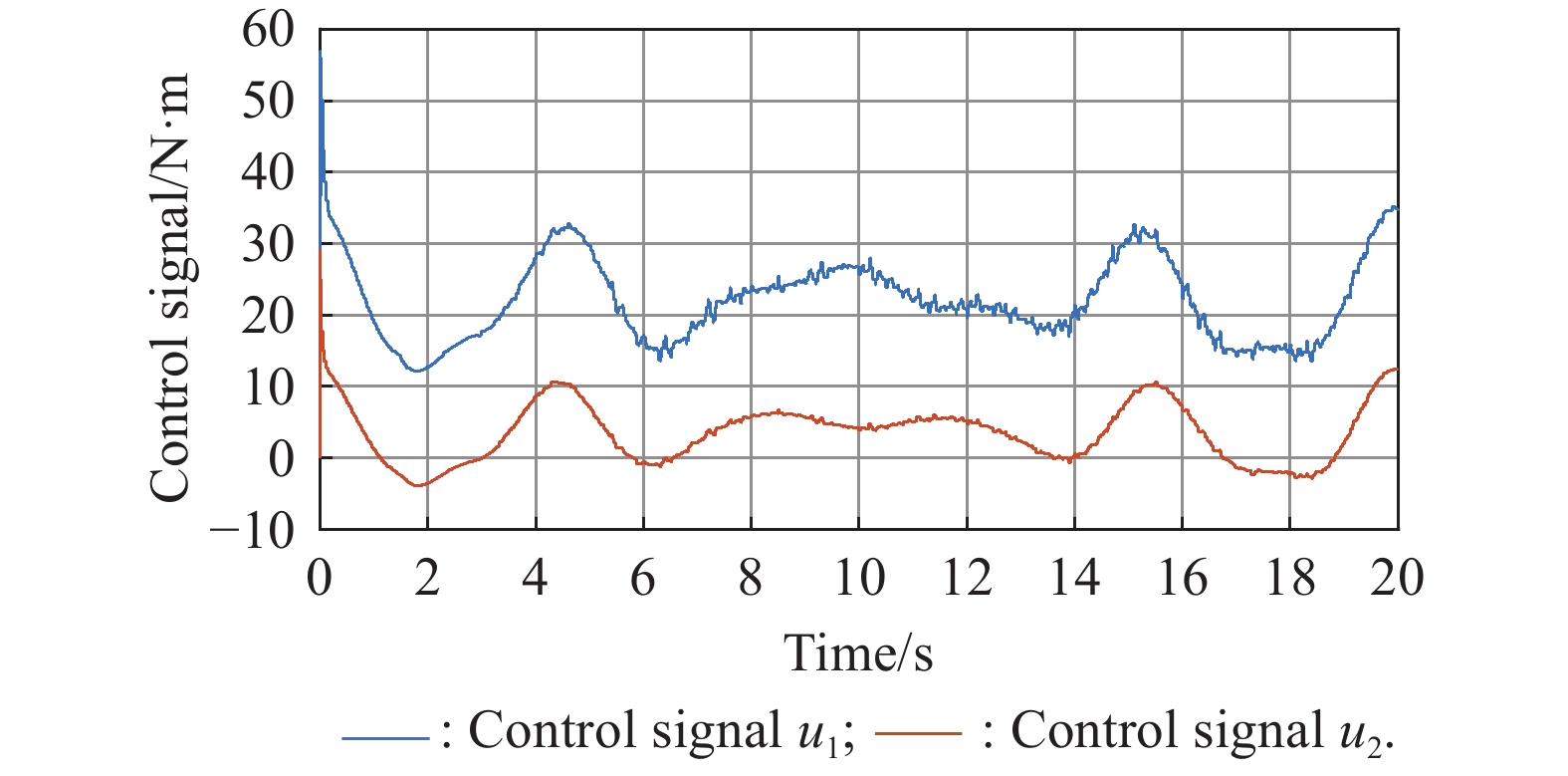
Fig 6
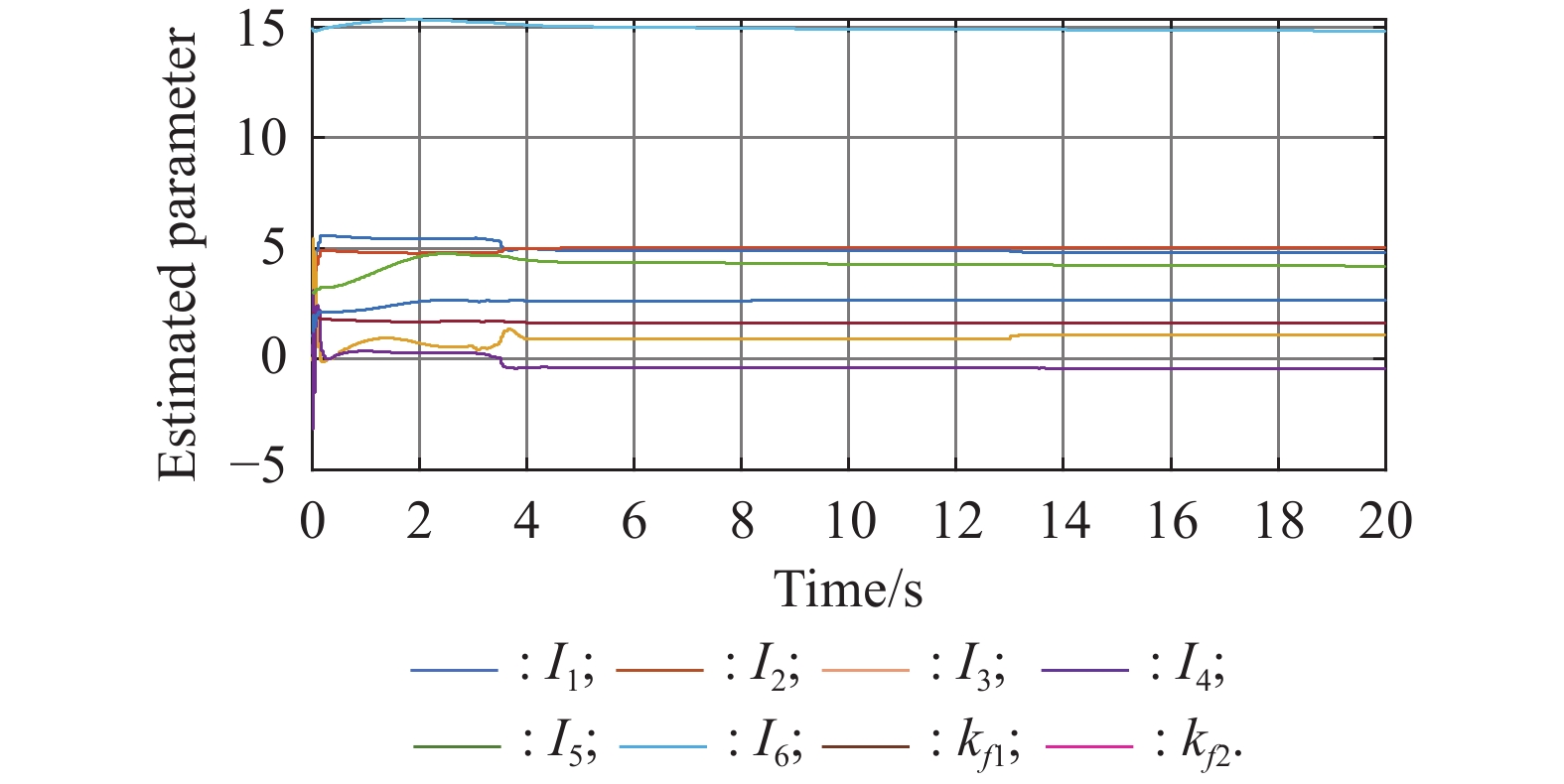
Signals of adaptive update law $\hat {\boldsymbol{\theta}} $"
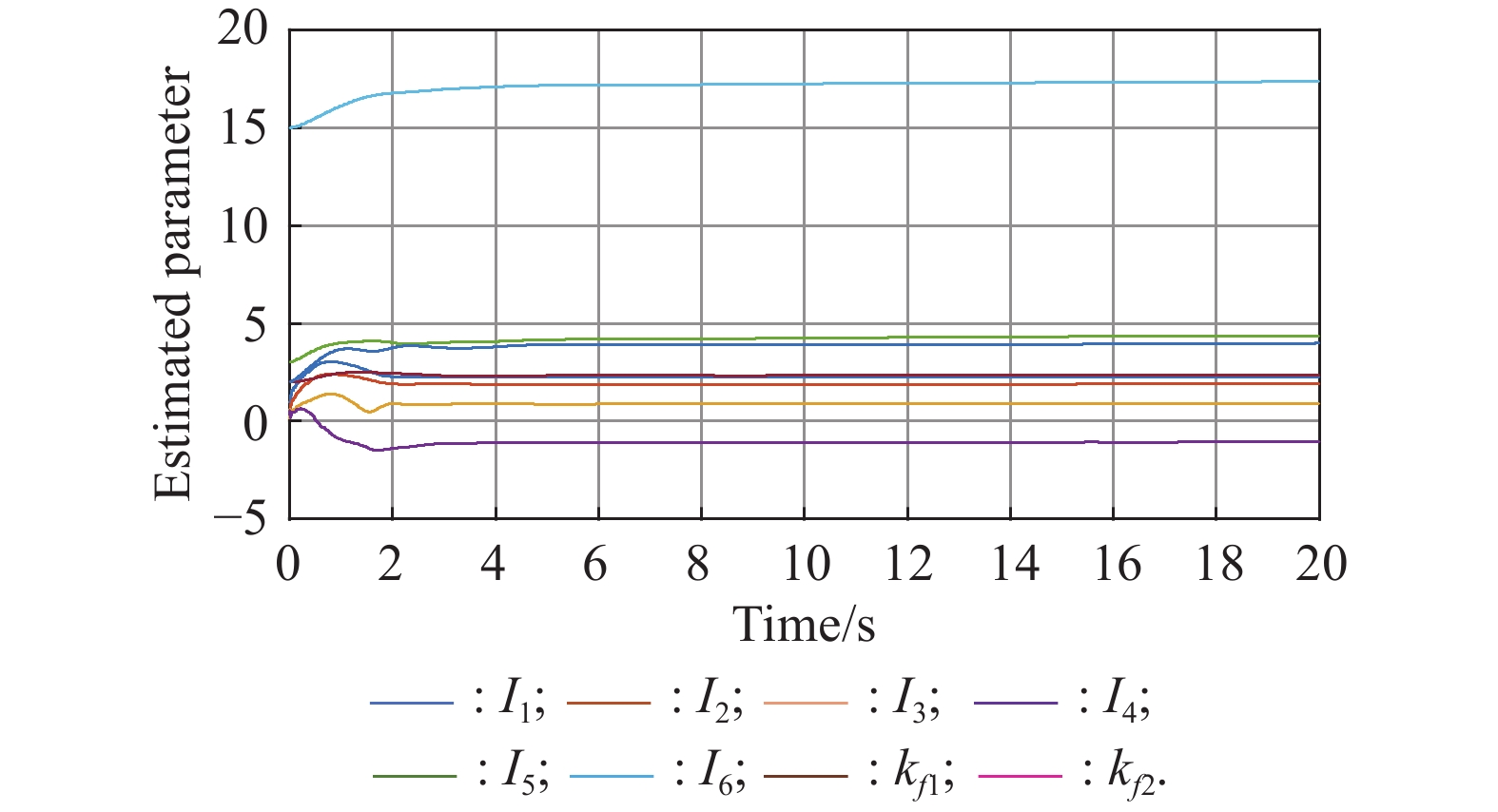
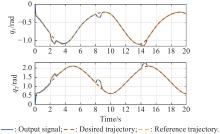
Fig 7
Joint angles under admittance control"
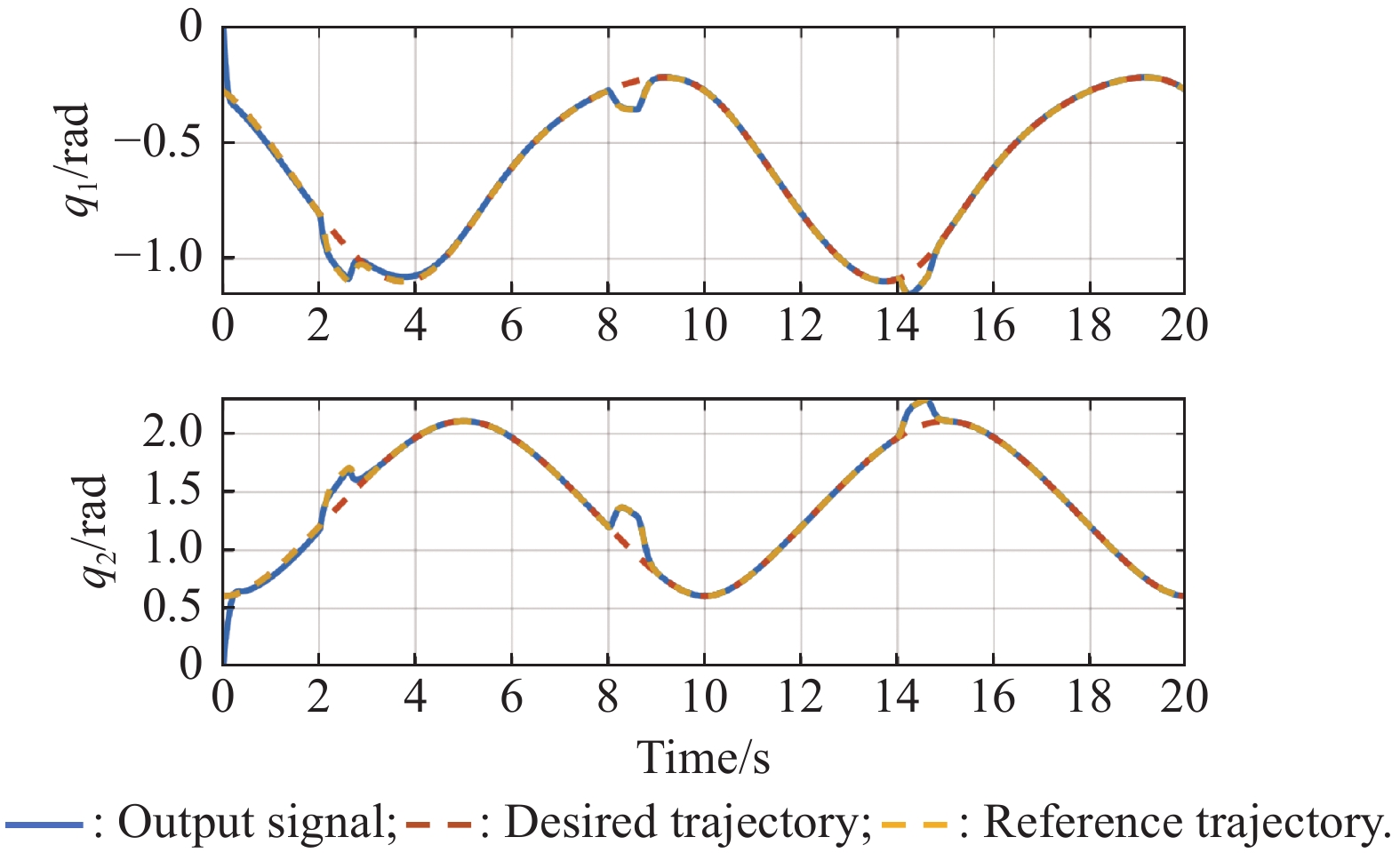
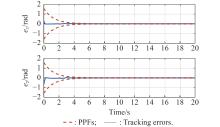
Fig 8
PPFs and tracking errors ε under admittance control"
Fig 9
Position of the end effector in the task space over time"
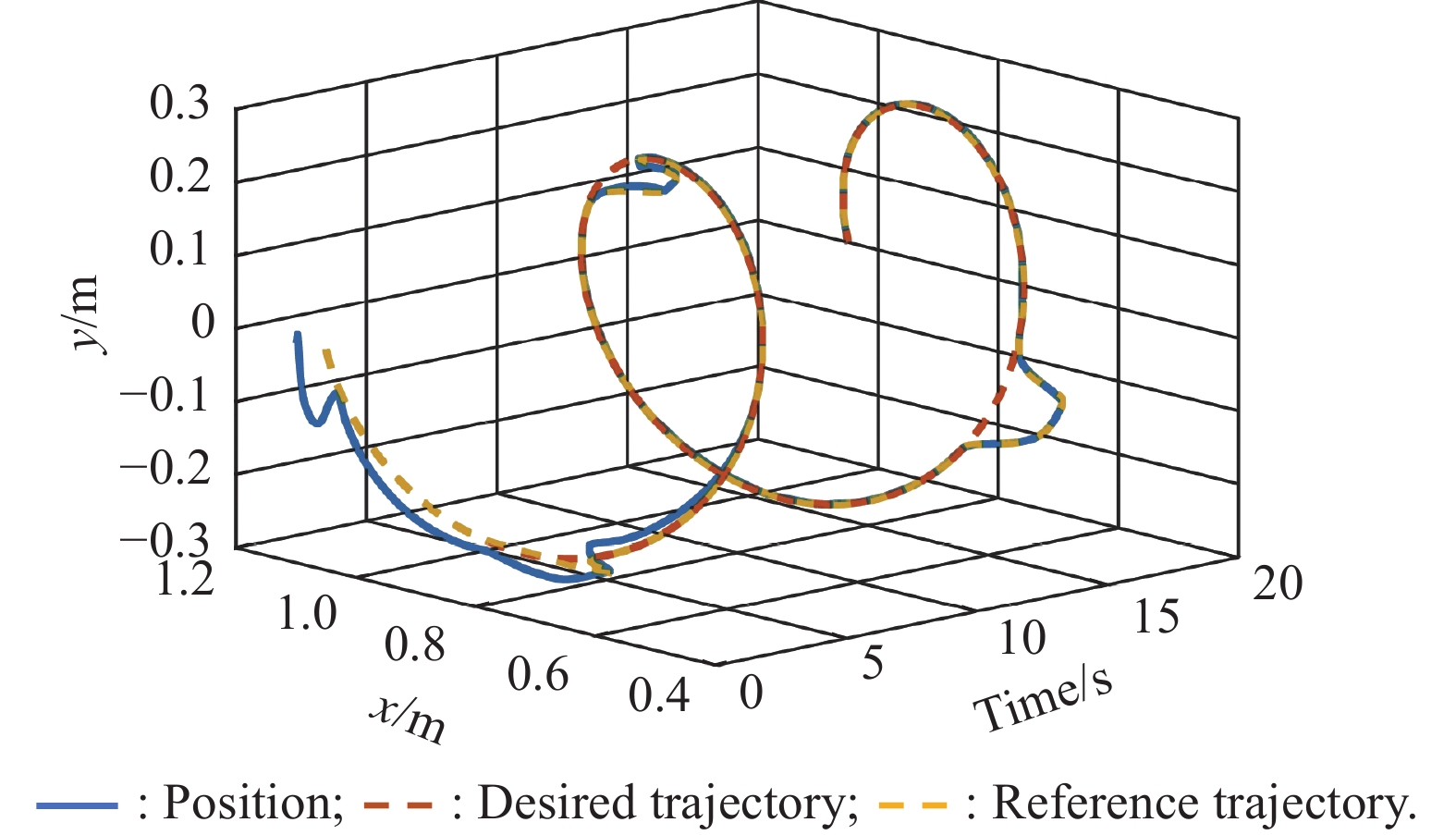
Fig 10
Controller output signals"
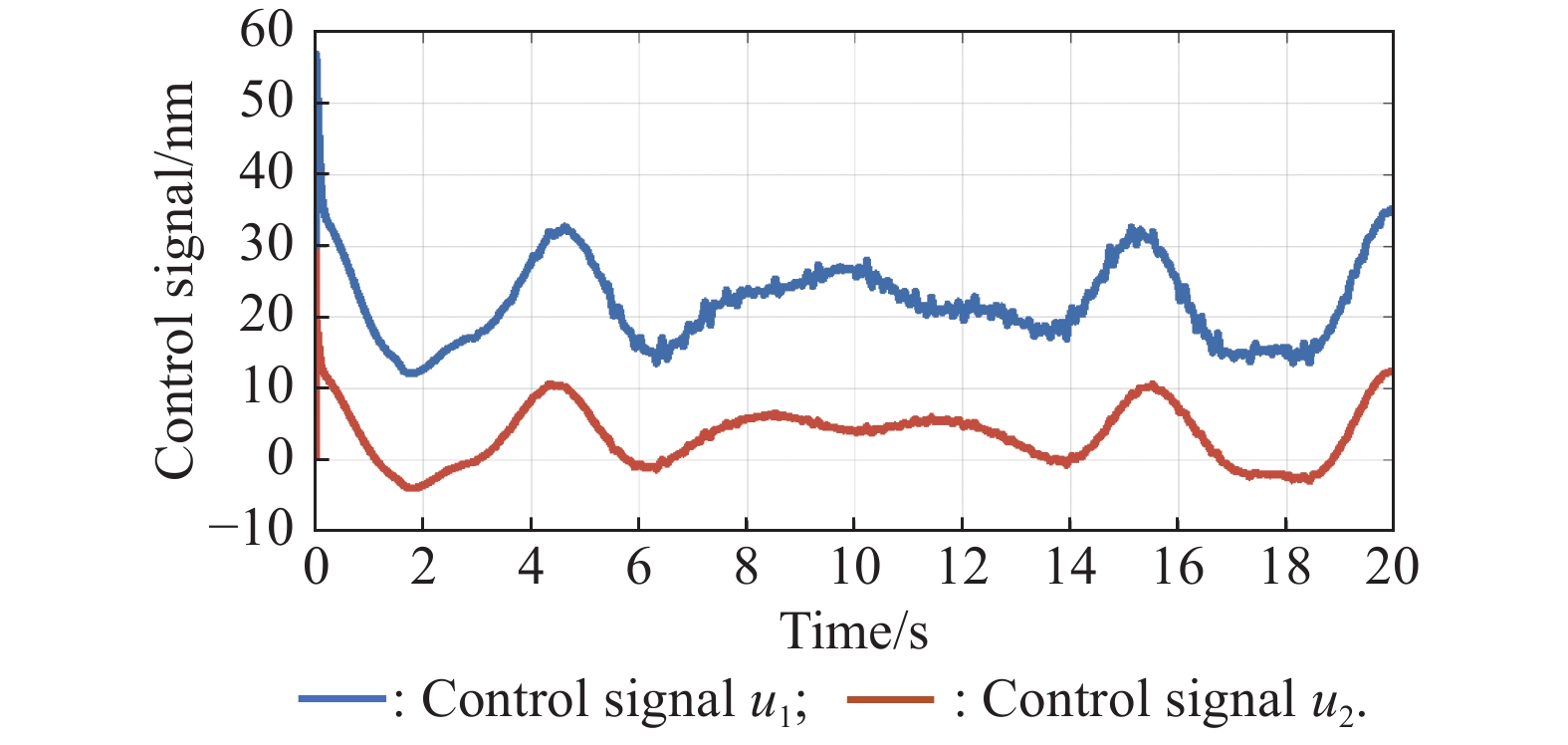
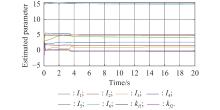
Fig 11
Signals of adaptive update law under admittance control"
| 1 | HU B, GUAN Z H, LEWIS F L, et al Adaptive tracking control of cooperative robot manipulators with Markovian switched couplings. IEEE Trans. on Industrial Electronics, 2020, 68 (3): 2427- 2436. |
| 2 | MENG Q, LAI X, YAN Z, et al. Motion planning and adaptive neural tracking control of an uncertain two-link rigid-flexible manipulator with vibration amplitude constraint. IEEE Trans. on Neural Networks and Learning Systems, 2021, 33(8): 3814−3828. |
| 3 | HU X, WEI X, ZHANG H, et al. Robust adaptive tracking control for a class of mechanical systems with unknown disturbances under actuator saturation. International Journal of Robust and Nonlinear Control, 2019, 29(6): 1893–1908. |
| 4 |
LI Z, HUANG B, AJOUDANI A, et al Asymmetric bimanual control of dual-arm exoskeletons for human-cooperative manipulations. IEEE Trans. on Robotics, 2018, 34 (1): 264- 271.
doi: 10.1109/TRO.2017.2765334 |
| 5 |
PEHLIVAN A U, LOSEY D P, O’MALLEY M K Minimal assist-as-needed controller for upper limb robotic rehabilitation. IEEE Trans. on Robotics, 2016, 32 (1): 113- 124.
doi: 10.1109/TRO.2015.2503726 |
| 6 | HE W, GE W, LI Y, et al. Model identification and control design for a humanoid robot. IEEE Trans. on Systems, Man, and Cybernetics: Systems, 2017, 47(1): 45–57. |
| 7 |
YU H, HUANG S, CHEN G, et al Human-robot interaction control of rehabilitation robots with series elastic actuators. IEEE Trans. on Robotics, 2015, 31 (5): 1089- 1100.
doi: 10.1109/TRO.2015.2457314 |
| 8 |
SUN L, ZHAO W, YIN W, et al Proxy based position control for flexible joint robot with link side energy feedback. Robotics and Autonomous Systems, 2019, 121, 103272.
doi: 10.1016/j.robot.2019.103272 |
| 9 | KIM J Two-time scale control of flexible joint robots with an improved slow model. IEEE Trans. on Industrial Electronics, 2017, 65 (4): 3317- 3325. |
| 10 | SUN W, SU S F, XIA J, et al. Adaptive fuzzy tracking control of flexible-joint robots with full-state constraints. IEEE Trans. on Systems, Man, and Cybernetics: Systems, 2018, 49(11): 2201–2209. |
| 11 | ZENG C, YANG C, CHEN Z Bio-inspired robotic impedance adaptation for human-robot collaborative tasks. Science China Information Sciences, 2020, 63, 1- 10. |
| 12 |
SHI Q, LI C, LI K, et al A modified robotic rat to study rat-like pitch and yaw movements. IEEE/ASME Trans. on Mechatronics, 2018, 23 (5): 2448- 2458.
doi: 10.1109/TMECH.2018.2863269 |
| 13 |
YANG C, WU H, LI Z, et al Mind control of a robotic arm with visual fusion technology. IEEE Trans. on Industrial Informatics, 2018, 14 (9): 3822- 3830.
doi: 10.1109/TII.2017.2785415 |
| 14 |
LI Z, ZHAO T, CHEN F, et al Reinforcement learning of manipulation and grasping using dynamical movement primitives for a humanoidlike mobile manipulator. IEEE/ASME Trans. on Mechatronics, 2018, 23 (1): 121- 131.
doi: 10.1109/TMECH.2017.2717461 |
| 15 |
RAIBERT M H, CRAIG J J Hybrid position/force control of manipulators. Journal of Dynamic Systems, Measurement, and Control, 1981, 103 (2): 126- 133.
doi: 10.1115/1.3139652 |
| 16 |
HOGAN N Impedance control: an approach to manipulation: Part II—implementation. Journal of Dynamic Systems, Measurement, and Control, 1985, 107 (1): 8- 16.
doi: 10.1115/1.3140713 |
| 17 |
HASHTRUDI-ZAAD K, SALCUDEAN S E Analysis of control architectures for teleoperation systems with impedance/admittance master and slave manipulators. The International Journal of Robotics Research, 2001, 20 (6): 419- 445.
doi: 10.1177/02783640122067471 |
| 18 | HE W, AMOATENG D O, YIN Z, et al. Neural network control of a robotic manipulator with input deadzone and output constraint. IEEE Trans. on Systems, Man, and Cybernetics: Systems, 2015, 46(6): 759–770. |
| 19 | YANG Y, HUA C, GUAN X Finite time control design for bilateral teleoperation system with position synchronization error constrained. IEEE Trans. on Cybernetics, 2015, 46 (3): 609- 619. |
| 20 |
YU J, SHI P, ZHAO L Finite-time command filtered backstepping control for a class of nonlinear systems. Automatica, 2018, 92, 173- 180.
doi: 10.1016/j.automatica.2018.03.033 |
| 21 | POLYAKOV A Nonlinear feedback design for fixed-time stabilization of linear control systems. IEEE Trans. on Automatic Control, 2011, 57 (8): 2106- 2110. |
| 22 |
HONG H K, YU C, YU W Adaptive fixed-time control for attitude consensus of disturbed multi-spacecraft systems with directed topologies. IEEE Trans. on Network Science and Engineering, 2022, 9 (3): 1451- 1461.
doi: 10.1109/TNSE.2022.3145692 |
| 23 |
BECHLIOULIS C P, ROVITHAKIS G A Robust adaptive control of feedback linearizable MIMO nonlinear systems with prescribed performance. IEEE Trans. on Automatic Control, 2008, 53 (9): 2090- 2099.
doi: 10.1109/TAC.2008.929402 |
| 24 |
LI Y, TONG S, LIU L, et al Adaptive output-feedback control design with prescribed performance for switched nonlinear systems. Automatica, 2017, 80, 225- 231.
doi: 10.1016/j.automatica.2017.02.005 |
| 25 | WANG M, WANG C, SHI P, et al Dynamic learning from neural control for strict-feedback systems with guaranteed predefined performance. IEEE Trans. on Neural Networks and Learning Systems, 2015, 27 (12): 2564- 2576. |
| 26 |
HUANG X, DUAN G Fault-tolerant attitude tracking control of combined spacecraft with reaction wheels under prescribed performance. ISA Transactions, 2020, 98, 161- 172.
doi: 10.1016/j.isatra.2019.08.041 |
| 27 | ZHANG J X, YANG G H. Event-triggered prescribed performance control for a class of unknown nonlinear systems. IEEE Trans. on Systems, Man, and Cybernetics: Systems, 2020, 51(10): 6576–6586. |
| 28 | LIU Y J, CHEN H. Adaptive sliding mode control for uncertain active suspension systems with prescribed performance. IEEE Trans. on Systems, Man, and Cybernetics: Systems, 2020, 51(10): 6414–6422. |
| 29 | BU X W, QI Q, JIANG B A simplified finite-time fuzzy neural controller with prescribed performance applied to waverider aircraft. IEEE Trans. on Fuzzy Systems, 2021, 30 (7): 2529- 2537. |
| 30 |
WANG W, WEN C Y Adaptive actuator failure compensation control of uncertain nonlinear systems with guaranteed transient performance. Automatica, 2010, 46 (12): 2082- 2091.
doi: 10.1016/j.automatica.2010.09.006 |
| 31 | KRSTIC M, KOKOTOVIC P V, KANELLAKOPOULOS I. Nonlinear and adaptive control design. New York: Wiley, 1995. |
| 32 | LING S W, WANG H, LIU P X Adaptive fuzzy tracking control of flexible-joint robots based on command filtering. IEEE Trans. on Industrial Electronics, 2019, 67 (5): 4046- 4055. |
| [1] | Dongdong YAO, Xiaofang WANG, Hai LIN, Zhuping WANG. Leader trajectory planning method considering constraints of formation controller [J]. Journal of Systems Engineering and Electronics, 2023, 34(5): 1294-1308. |
| [2] | Haichao ZHU, Weiyao LAN. Robust output regulation problem with prescribed performance for nonlinear strict feedback systems [J]. Journal of Systems Engineering and Electronics, 2023, 34(4): 1033-1041. |
| [3] | Dakai LIU, Sven ESCHE. Revised barrier function-based adaptive finite- and fixed-time convergence super-twisting control [J]. Journal of Systems Engineering and Electronics, 2023, 34(3): 775-782. |
| [4] | Hua CHEN, Chao SHEN, Jiahui HUANG, Yuhan CAO. Event-triggered model-free adaptive control for a class of surface vessels with time-delay and external disturbance via state observer [J]. Journal of Systems Engineering and Electronics, 2023, 34(3): 783-797. |
| [5] | Fan WANG, Pengfei FAN, Yonghua FAN, Bin XU, Jie YAN. Robust adaptive control of hypersonic vehicle considering inlet unstart [J]. Journal of Systems Engineering and Electronics, 2022, 33(1): 188-196. |
| [6] |
Zhaoying LI, Shuai SHI, Hao LIU.
Trajectory tracking of tail-sitter aircraft by |
| [7] | Ziquan YU, Youmin ZHANG, Bin JIANG. PID-type fault-tolerant prescribed performance control of fixed-wing UAV [J]. Journal of Systems Engineering and Electronics, 2021, 32(5): 1053-1061. |
| [8] | Fuhui GUO, Pingli LU. Fast self-adapting high-order sliding mode control for a class of uncertain nonlinear systems [J]. Journal of Systems Engineering and Electronics, 2021, 32(3): 690-699. |
| [9] | Tao ZHANG, Jiong LI, Weimin LI, Huaji WANG, Humin LEI. Prescribed performance neural control to guarantee tracking quality for near space kinetic kill vehicle [J]. Journal of Systems Engineering and Electronics, 2019, 30(3): 573-586. |
| [10] | Yang LI, Mingyong LIU, Xiaojian ZHANG, Xingguang PENG. Global approximation based adaptive RBF neural network control for supercavitating vehicles [J]. Journal of Systems Engineering and Electronics, 2018, 29(4): 797-804. |
| [11] | Ri Liu, Xiuxia Sun, Wenhan Dong, and Dong Wang. Finite-time adaptive sliding mode control for heavyweight airdrop operations [J]. Systems Engineering and Electronics, 2017, 28(2): 338-346. |
| [12] | Jiaoru Huang, Fucai Qian, Guo Xie, and Hengzhan Yang. Robust adaptive control for dynamic systems with mixed uncertainties [J]. Systems Engineering and Electronics, 2016, 27(3): 656-663. |
| [13] | Xuemei Zheng, Peng Li, Haoyu Li, and Danmei Ding. Adaptive backstepping-based NTSM control for unmatched uncertain nonlinear systems [J]. Systems Engineering and Electronics, 2015, 26(3): 557-564. |
| [14] | Yong Guo, Shenmin Song, and Liwei Deng. Finite-time coordination control for formation flying spacecraft [J]. Journal of Systems Engineering and Electronics, 2014, 25(5): 859-867. |
| [15] | Xuelian Yao, Gang Tao, and Ruiyun Qi. Adaptive actuator failure compensation and disturbance rejection scheme for spacecraft [J]. Journal of Systems Engineering and Electronics, 2014, 25(4): 648-. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||