
Journal of Systems Engineering and Electronics ›› 2024, Vol. 35 ›› Issue (6): 1563-1573.doi: 10.23919/JSEE.2024.000077
• CONTROL THEORY AND APPLICATION • Previous Articles
Jie LI1,2( ), Yuanqing XIA1,2,*()
), Yuanqing XIA1,2,*()
Received:2023-05-30
Accepted:2023-05-30
Online:2024-12-18
Published:2025-01-14
Contact:
Yuanqing XIA
E-mail:lijienewlife@bit.edu.cn;xia_yuanqing@bit.edu.cn
About author:Supported by:Jie LI, Yuanqing XIA. On stability analysis of nonlinear ADRC-based control system with application to inverted pendulum problems[J]. Journal of Systems Engineering and Electronics, 2024, 35(6): 1563-1573.
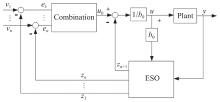
Fig 1
Diagram of ADRC structure"
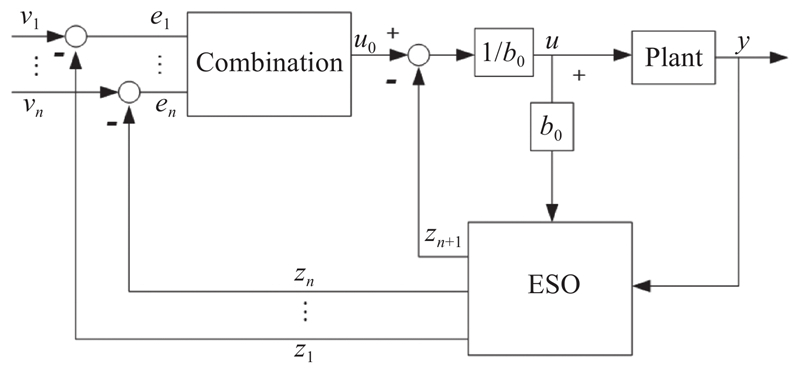

Fig 2
Inverted pendulum experimental equipment"
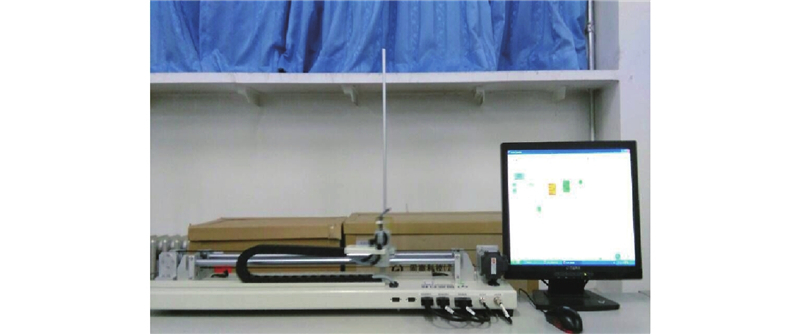
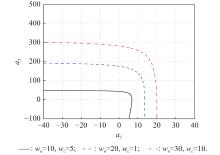
Fig 3
Stable region in ${\boldsymbol{a}}_{\boldsymbol{1}} {\boldsymbol{-}} {\boldsymbol{a}}_{\boldsymbol{2}} $ plane"
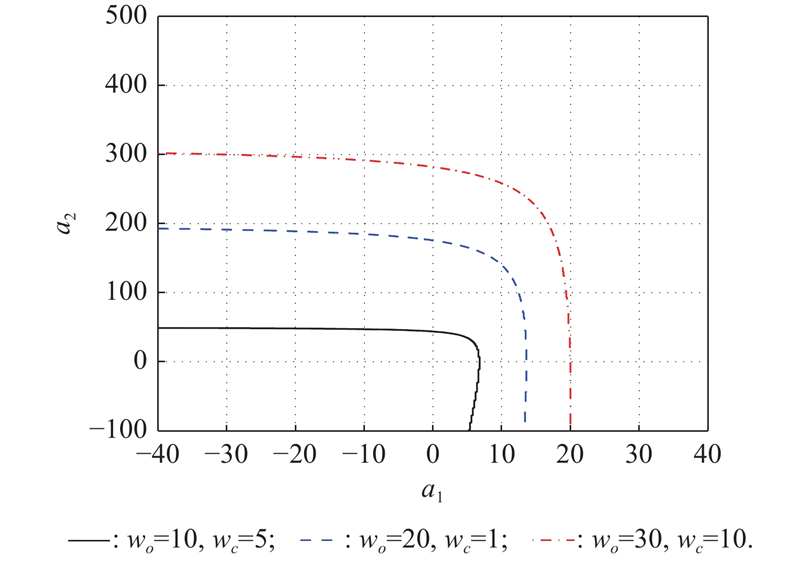
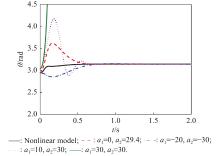
Fig 4
Stability analysis by simulations"
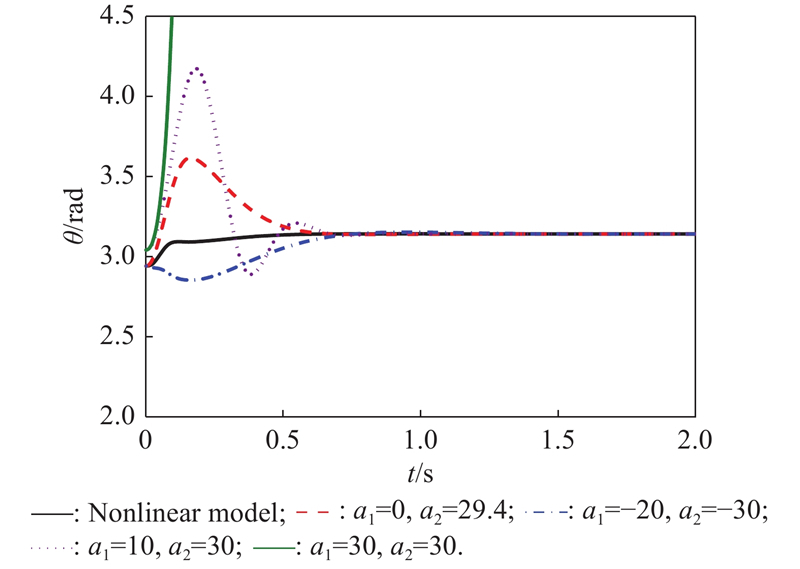
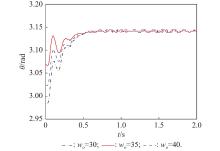
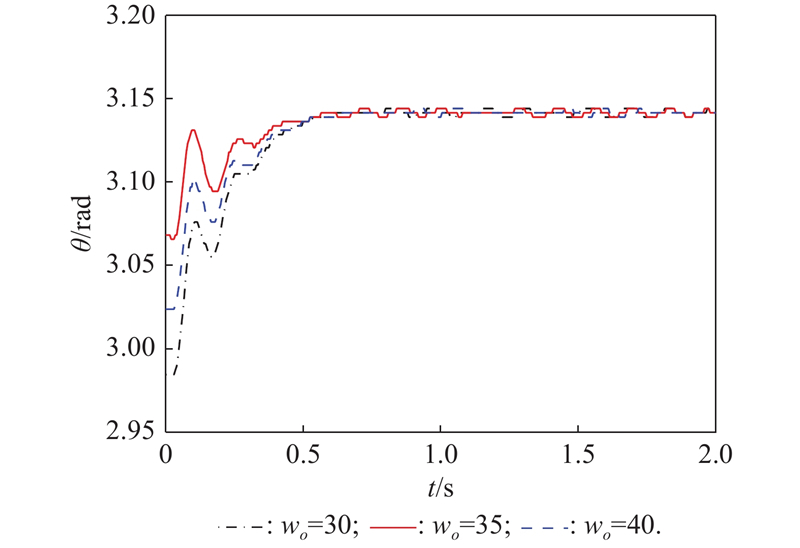
Fig 5
Real-time control dynamics"
| 1 |
HAN J From PID to active disturbance rejection control. IEEE Trans. on Industrial Electronics, 2009, 56 (3): 900- 906.
doi: 10.1109/TIE.2008.2011621 |
| 2 | GAO Z Q Scaling and bandwidth-parameterization based controller tuning. Proc. of the American Control Conference, 2006, 4989- 4996. |
| 3 | GUO B Z, ZHAO Z L On the convergence of an extended state observer for nonlinear systems with uncertainty. Systems & Control Letters, 2011, 60 (6): 420- 430. |
| 4 |
GUO B Z, ZHAO Z L Weak convergence of nonlinear high-gain tracking differentiator. IEEE Trans. on Automatic Control, 2013, 58 (4): 1074- 1080.
doi: 10.1109/TAC.2012.2218153 |
| 5 |
LI J, XIA Y Q, QI X H, et al Robust absolute stability analysis for interval nonlinear active disturbance rejection based control system. ISA Transactions, 2017, 69, 122- 130.
doi: 10.1016/j.isatra.2017.04.017 |
| 6 |
LI J, XIA Y Q, QI X H, et al On convergence of the discrete-time nonlinear extended state observer. Journal of the Franklin Institute, 2018, 355 (1): 501- 519.
doi: 10.1016/j.jfranklin.2017.11.019 |
| 7 |
WAN H, QI X H, LI J Stability analysis of linear/nonlinear switching active disturb-ance rejection control based MIMO continuous systems. Journal of Systems Engineering and Electronics, 2021, 32 (4): 956- 970.
doi: 10.23919/JSEE.2021.000082 |
| 8 |
CHEN S, XUE W C, HUANG Y Analytical design of active disturbance rejection control for nonlinear uncertain systems with delay. Control Engineering Practice, 2019, 84, 323- 336.
doi: 10.1016/j.conengprac.2018.12.007 |
| 9 |
CHEN S, HUANG Y The selection criterion of nominal model in active disturbance rejection control for nonaffine uncertain systems. Journal of the Franklin Institute, 2020, 357 (6): 3365- 3386.
doi: 10.1016/j.jfranklin.2019.12.023 |
| 10 | CHEN S, CHEN Z, HUANG Y, et al New design of active disturbance rejection control for nonlinear uncertain systems with unknown control input gain. Science China Information Sciences, 2022, 65 (4): 152- 164. |
| 11 |
YUAN G, DUAN H B Robust control for UAV close formation using LADRC via sine-powered pigeon-inspired optimization. Drones, 2023, 7, 238- 263.
doi: 10.3390/drones7040238 |
| 12 |
PAN Z, WANG X, ZHENG Z, et al Fractional-order linear active disturbance rejection control strategy for grid-side current of PWM rectifiers. IEEE Journal of Emerging and Selected Topics in Power Electronics, 2023, 11 (4): 3827- 3838.
doi: 10.1109/JESTPE.2023.3264481 |
| 13 |
WANG C, YAN J, HENG P, et al Enhanced LADRC for permanent magnet synchronous motor with compensation function observer. IEEE Journal of Emerging and Selected Topics in Power Electronics, 2023, 11 (3): 3424- 3434.
doi: 10.1109/JESTPE.2023.3265686 |
| 14 |
TIAN M, WANG B, YU Y, et al Adaptive active disturbance rejection control for uncertain current ripples suppression of PMSM drives. IEEE Trans. on Industrial Electronics, 2024, 71 (3): 2320- 2331.
doi: 10.1109/TIE.2023.3265045 |
| 15 |
XU Z, GERADA C Enhanced estimation of clamping-force for automotive EMB actuators using a switching extended state observer. IEEE Trans. on Industrial Electronics, 2024, 71 (3): 2220- 2230.
doi: 10.1109/TIE.2023.3265060 |
| 16 |
ZHENG Y, TAO J, SUN Q, et al DDPG-based active disturbance rejection 3D path-following control for powered parafoil under wind disturbances. Nonlinear Dynamics, 2023, 111 (12): 11205- 11221.
doi: 10.1007/s11071-023-08444-4 |
| 17 |
ZHAN Z L, GUO B Z On convergence of nonlinear active disturbance rejection control for a class of nonlinear systems. Journal of Dynamical and Control Systems, 2016, 22 (2): 385- 412.
doi: 10.1007/s10883-015-9304-5 |
| 18 | GUO B Z, ZHAO Z L On convergence of the nonlinear active disturbance rejection control for MIMO systems. SIAM Journal on Control and Optimization, 2013, 52 (2): 1727- 1757. |
| 19 |
WU D, CHEN K Frequency-domain analysis of nonlinear active disturbance rejection control via the describing function method. IEEE Trans. on Industrial Electronics, 2013, 60 (9): 3906- 3914.
doi: 10.1109/TIE.2012.2203777 |
| 20 |
WU D, CHEN K Limit cycle analysis of active disturbance rejection control system with two nonlinearities. ISA Transactions, 2014, 53 (4): 947- 954.
doi: 10.1016/j.isatra.2014.03.001 |
| 21 |
LI J, QI X H, XIA Y Q, et al Frequency domain stability analysis of nonlinear active disturbance rejection control system. ISA Transactions, 2015, 56, 188- 195.
doi: 10.1016/j.isatra.2014.11.009 |
| 22 |
LI J, XIA Y Q, QI X H, et al Absolute stability analysis of non-linear active disturbance rejection control for single-input-single-output systems via the circle criterion method. IET Control Theory and Application, 2015, 9 (15): 2320- 2329.
doi: 10.1049/iet-cta.2015.0320 |
| 23 |
QI X H, LI J, XIA Y Q, et al On the robust stability of active disturbance rejection control for SISO systems. Circuits, systems and signal proccessing, 2017, 36 (1): 65- 81.
doi: 10.1007/s00034-016-0302-y |
| 24 |
QI X H, LI J, XIA Y Q, et al On stability for sampled-data nonlinear ADRC-based control system with application to the ball-beam problem. Journal of the Franklin Institute, 2018, 355 (17): 8537- 8553.
doi: 10.1016/j.jfranklin.2018.09.002 |
| 25 |
LI S, YANG J, CHEN W H, et al Generalized extended state observer based control for systems with mismatched uncertainties. IEEE Trans. on Industrial Electronics, 2012, 59 (12): 4792- 4802.
doi: 10.1109/TIE.2011.2182011 |
| 26 |
CASTILLO A, GARCLA P, SANZ R, et al Enhanced extended state observer-based control for systems with mismatched uncertainties and disturbance. ISA Transactions, 2018, 73, 1- 10.
doi: 10.1016/j.isatra.2017.12.005 |
| 27 | CHEN S, BAI W Y, HU Y, et al On the conceptualization of total disturbance and its profound implications. Science China Information Sciences, 2020, 63 (2): 221- 223. |
| 28 | LI J, QI X H, XIA Y Q, et al On linear/nonlinear active disturbance rejection switching control. Acta Automatica Sinica, 2016, 42 (2): 202- 212. |
| 29 |
LI J, QI X H, XIA Y Q, et al On the necessity, scheme and basis of the linear-nonlinear switching in active disturbance rejection control. IEEE Trans. on Industrial Electronics, 2017, 64 (2): 1425- 1435.
doi: 10.1109/TIE.2016.2611573 |
| 30 | QIN C M. Research on fractional order PID controller and ADRC for hypersonic vehicle. Harbin: Harbin Institute of Technology, 2011. (in Chinese) |
| 31 | BOYD S, GHAOUI E L, FERO E, et al. Linear matix inequality in system and control theory. Philadelphia: Springer Verlag, 1994. |
| 32 | Googol Technology (Shenzhen) Ltd. Inverted pendulum and experiments of automatic control theory. Googoltech, 2005. |
| [1] | Hui WAN, Xiaohui QI, Jie LI. Stability analysis of linear/nonlinear switching active disturbance rejection control based MIMO continuous systems [J]. Journal of Systems Engineering and Electronics, 2021, 32(4): 956-970. |
| [2] | Abdollah AZIZI, Mehdi FOROUZANFAR. Stabilizing controller design for nonlinear fractional order systems with time varying delays [J]. Journal of Systems Engineering and Electronics, 2021, 32(3): 681-689. |
| [3] | Junjie LIU, Mingwei SUN, Zengqiang CHEN, Qinglin SUN. High AOA decoupling control for aircraft based on ADRC [J]. Journal of Systems Engineering and Electronics, 2020, 31(2): 393-402. |
| [4] | Wei Jiang, Hongli Wang, Jinghui Lu, and Zheng Xie. HOSVD-based LPV modeling and mixed robust H2/H∞ control design for air-breathing hypersonic vehicle [J]. Systems Engineering and Electronics, 2016, 27(1): 183-. |
| [5] | Songtao Zhang, Xiaowei Zhao, and Jiantong Zhang. Stability and stabilization of discrete T-S fuzzy time-delay system based on maximal overlapped-rules group [J]. Systems Engineering and Electronics, 2016, 27(1): 201-. |
| [6] | Zhichao Zhou, Yang Xiao, and Dong Wang. Stability analysis of wireless network with improved fluid model [J]. Systems Engineering and Electronics, 2015, 26(6): 1149-1158. |
| [7] | Yueyue Ma, Jie Guo, and Shengjing Tang. BTT autopilot design for agile missiles with aerodynamic uncertainty [J]. Journal of Systems Engineering and Electronics, 2015, 26(4): 802-. |
| [8] | Pan Xiong, Feng Wang, Xibin Cao, and Guangren Duan. Robust D-stability LMI conditions of matrix polytopes via affine parameter-dependent Lyapunov functions [J]. Journal of Systems Engineering and Electronics, 2013, 24(6): 984-991. |
| [9] | Chaoyang Jiang and Yongan Zhang. Reduced-order Kalman filtering for state constrained linear systems [J]. Journal of Systems Engineering and Electronics, 2013, 24(4): 674-682. |
| [10] | Hongbing Zeng, Shenping Xiao, and Bin Liu. Improved delay-dependent stability criteria for systems with interval delay [J]. Journal of Systems Engineering and Electronics, 2011, 22(6): 998-1002. |
| [11] | Pei Cheng, Feiqi Deng, and Yunjian Peng. Delay-dependent exponential stability of impulsive stochastic systems with time-varying delay [J]. Journal of Systems Engineering and Electronics, 2011, 22(5): 799-809. |
| [12] | Li Ma and Feipeng Da. Mean-square exponential stability for stochastic time-varying delay systems with Markovian jumping parameters: a delay decomposition approach [J]. Journal of Systems Engineering and Electronics, 2011, 22(5): 816-824. |
| [13] | Yong Zhang, Huajing Fang, and Zhen Luo. H∞-based fault detection for nonlinear networked systems with random packet dropout and probabilistic interval delay [J]. Journal of Systems Engineering and Electronics, 2011, 22(5): 825-831. |
| [14] | Li Qiu, Bugong Xu, and Shanbin Li. Guaranteed cost control for discrete-time networked control systems with random Markov delays [J]. Journal of Systems Engineering and Electronics, 2011, 22(4): 661-671. |
| [15] | Yaonan Wang, Xiru Wu, and Yi Zuo. Robust fuzzy control of Takagi-Sugeno fuzzy neural networks with discontinuous activation functions and time delays [J]. Journal of Systems Engineering and Electronics, 2011, 22(3): 473-481. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||