
Journal of Systems Engineering and Electronics ›› 2025, Vol. 36 ›› Issue (4): 1094-1102.doi: 10.23919/JSEE.2025.000037
• CONTROL THEORY AND APPLICATION • Previous Articles
Yangjie LYU( ), Yan GAO(), Guoyuan QI()
), Yan GAO(), Guoyuan QI()
Received:2024-04-01
Online:2025-08-18
Published:2025-09-04
Contact:
Yan GAO
E-mail:1207245615@qq.com;gaoyan@tiangong.edu.cn;guoyuanqisa@qq.com
About author:Supported by:Yangjie LYU, Yan GAO, Guoyuan QI. Multicopter interception control based on visual servo and virtual tube in a cluttered environment[J]. Journal of Systems Engineering and Electronics, 2025, 36(4): 1094-1102.
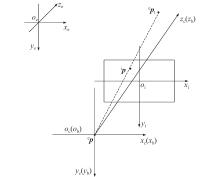
Fig 1
Relationship between the four coordinate systems"
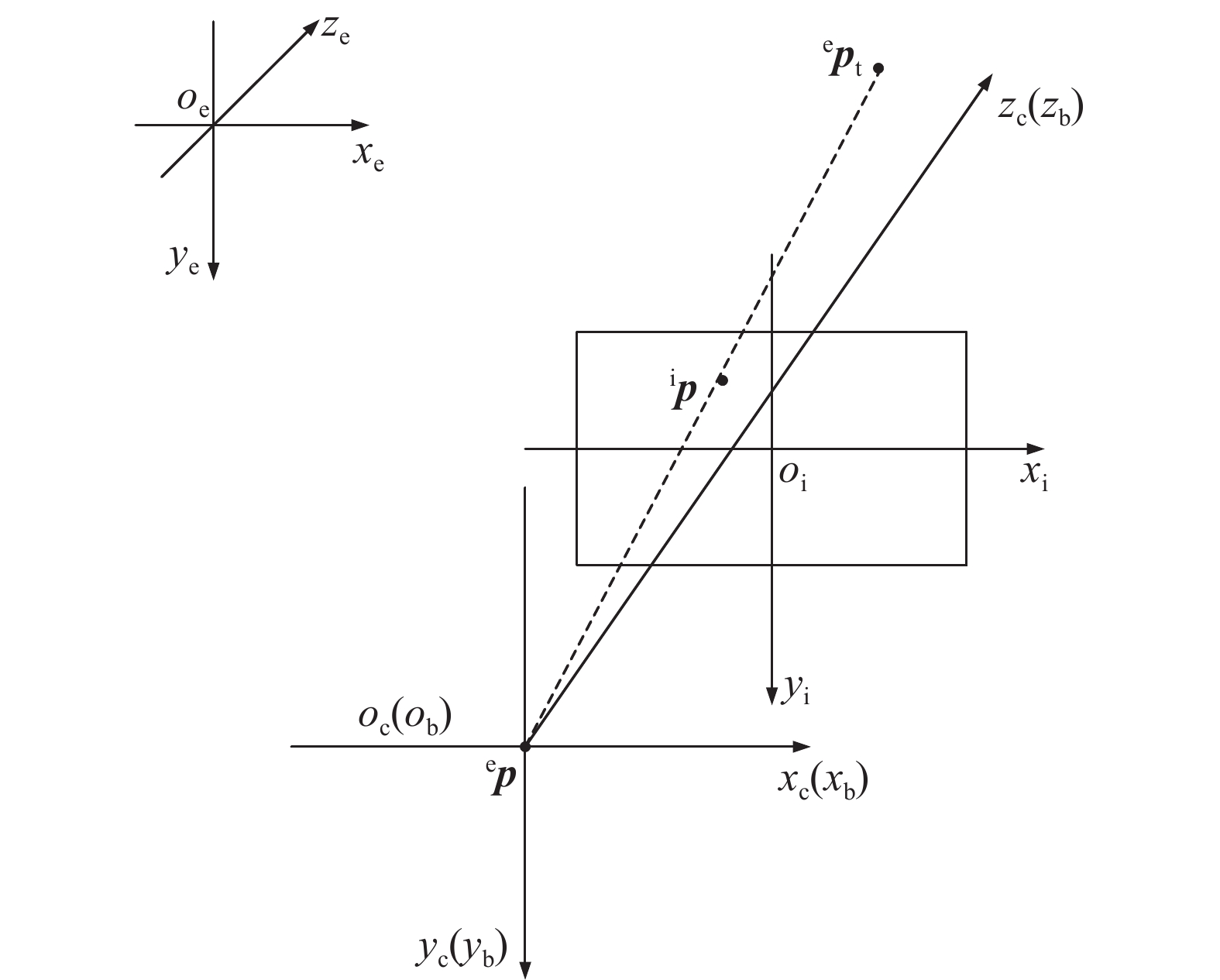
Fig 2
Virtual tube in two-dimensional space"
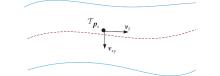
Fig 3
Velocity command of the multicopter in regular virtual tube"
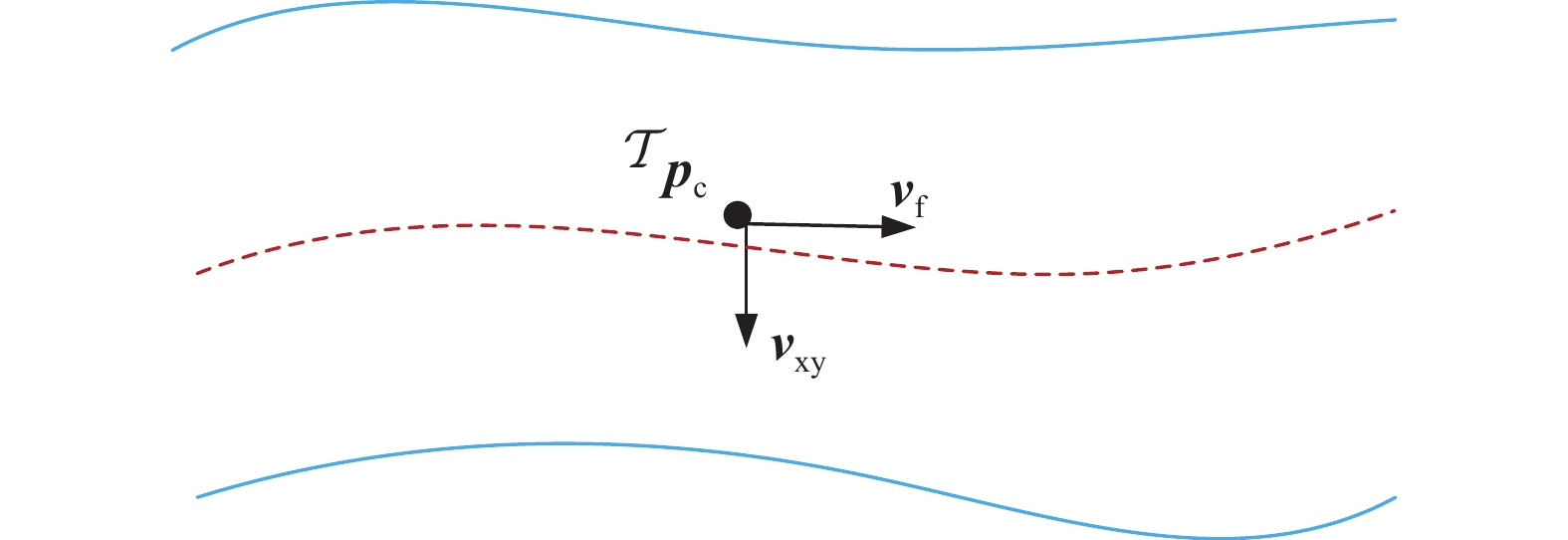
Table 1
Control parameters"
| Parameter | Value | Parameter | Value | |
| 0.8 | 0.8 | |||
| 0.2 | 1 |
Table 2
Time-consuming of different algorithms"
| Scenario | Modified A* algorithm/s | A* algorithm/s | Reduced time percentage/% |
| 1 | 0.025 | 0.028 | +10.7 |
| 2 | 0.032 | 0.036 | +11.1 |
| 3 | 0.033 | 0.037 | +10.8 |
| 4 | 0.032 | 0.030 | −6.7 |
| 5 | 0.034 | 0.035 | +2.9 |
| 6 | 0.034 | 0.037 | +8.1 |
| Average | 0.032 | 0.034 | +6.2 |

Fig 4
Comparison of the path planning results"
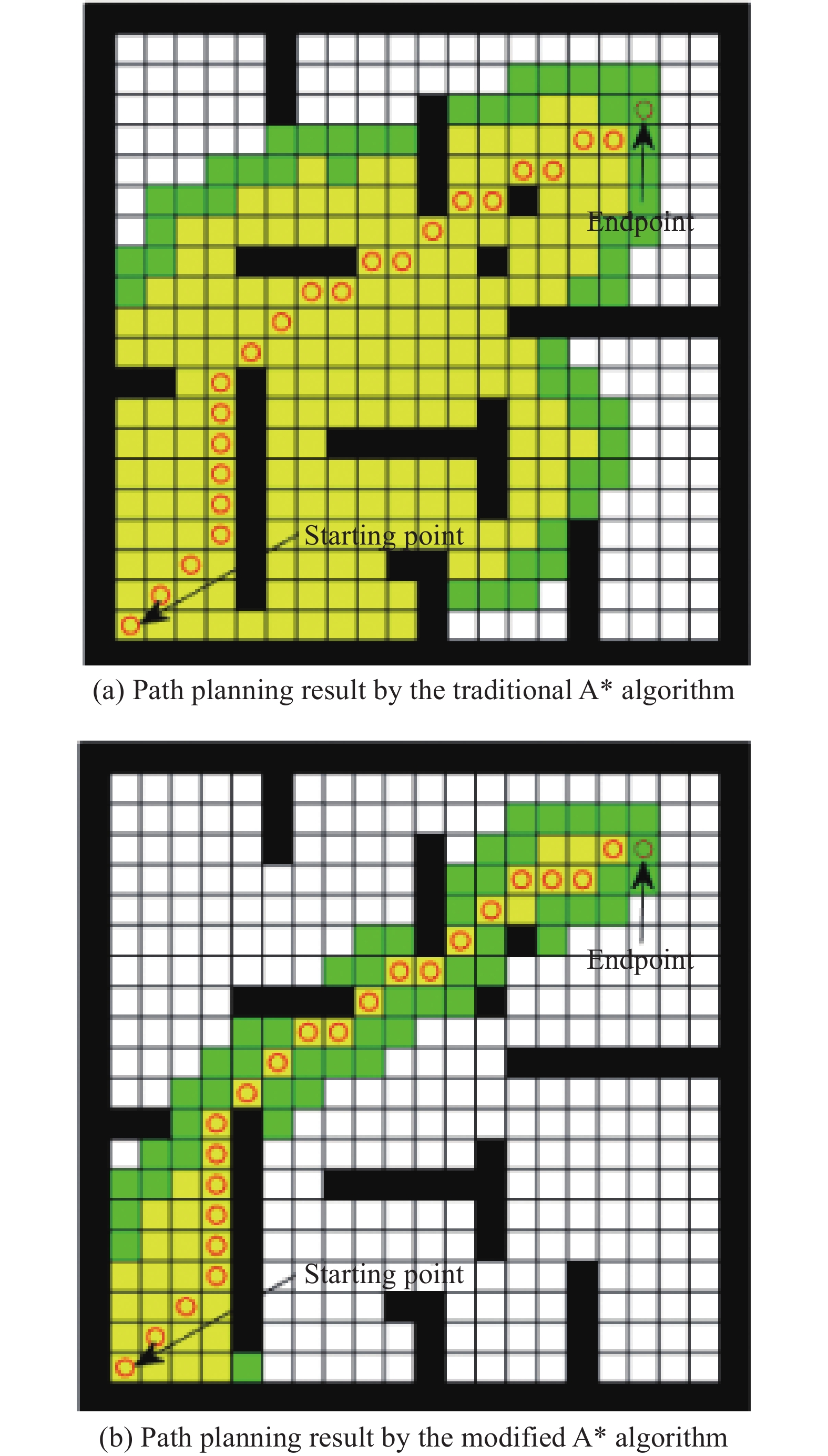
Fig 5
Generating curves by using two different objective functions"
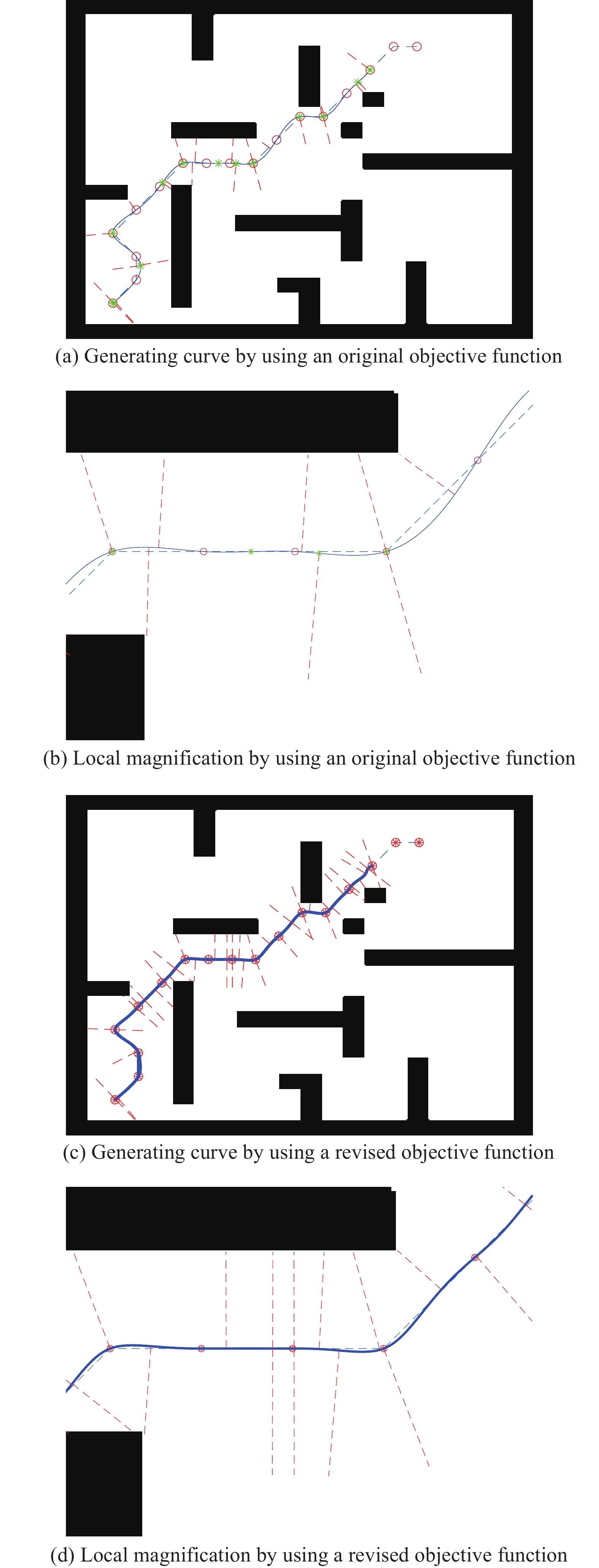
Fig 6
Regular virtual tube planning"
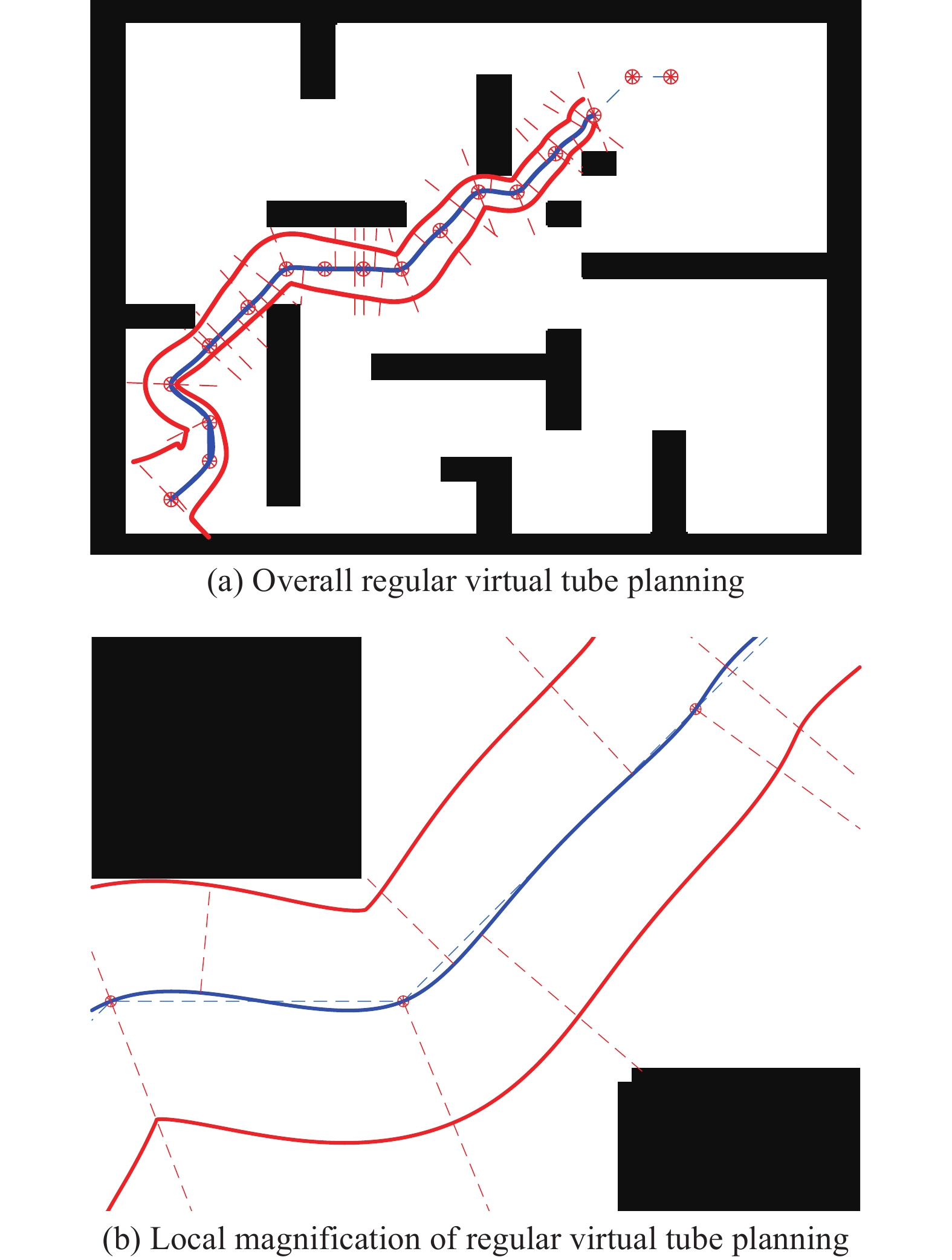

Fig 7
Identification of the target by the multicopter"


Fig 8
Interception of the target by the multicopter"

| 1 |
JAVED S, HASSAN A, AHMAD R, et al State-of-the-art and future research challenges in UAV swarms. IEEE Internet of Things Journal, 2024, 11 (11): 19023- 19045.
doi: 10.1109/JIOT.2024.3364230 |
| 2 |
ADNAN M H, ZUKARNAIN Z A, AMODU O A Fundamental design aspects of UAV-enabled MEC systems: a review on models, challenges, and future opportunities. Computer Science Review, 2024, 51, 100615.
doi: 10.1016/j.cosrev.2023.100615 |
| 3 |
REIMANN J, VACHTSEVANOS G UAVs in urban operations: target interception and containment. Journal of Intelligent and Robotic Systems, 2006, 47 (4): 383- 396.
doi: 10.1007/s10846-006-9089-6 |
| 4 |
KUROKI Y, YOUNG G S, HAUPT S E UAV navigation by an expert system for contaminant mapping with a genetic algorithm. Expert Systems with Applications, 2010, 37 (6): 4687- 4697.
doi: 10.1016/j.eswa.2009.12.039 |
| 5 |
BEST G, GARG R, KELLER J, et al Multi-robot, multi-sensor exploration of multifarious environments with full mission aerial autonomy. The International Journal of Robotics Research, 2024, 43 (4): 485- 512.
doi: 10.1177/02783649231203342 |
| 6 |
FRANCOS R M, BRUCKSTEIN A M On the role and opportunities in teamwork design for advanced multi-robot search systems. Frontiers in Robotics and AI, 2023, 10, 1089062.
doi: 10.3389/frobt.2023.1089062 |
| 7 |
AGGARWAL S, KUMAR N Path planning techniques for unmanned aerial vehicles: a review, solutions, and challenges. Computer Communications, 2020, 149, 270- 299.
doi: 10.1016/j.comcom.2019.10.014 |
| 8 |
AB WAHAB M N, NAZIR A, KHALIL A, et al Improved genetic algorithm for mobile robot path planning in static environments. Expert Systems with Applications, 2024, 249, 123762.
doi: 10.1016/j.eswa.2024.123762 |
| 9 | MAO P D, FU R, QUAN Q Optimal virtual tube planning and control for swarm robotics. The International Journal of Robotics Research, 2022, 43 (5): 602- 627. |
| 10 | GAO Y, BAI C G, QUAN Q Distributed control for a multi-agent system to pass through a connected quadrangle virtual tube. IEEE Trans. on Control of Network Systems, 2022, 10 (2): 693- 705. |
| 11 | QUAN Q, FU R, LI M X, et al Practical distributed control for VTOL UAVs to pass a virtual tube. IEEE Trans. on Intelligent Vehicles, 2021, 7 (2): 342- 353. |
| 12 | LYU S L, GAO Y, CHE J X, et al. Autonomous drone racing: time-optimal spatial iterative learning control within a virtual tube. Proc. of the IEEE International Conference on Robotics and Automation, 2023: 3197−3203. |
| 13 |
FICCO M, GRANATA D, PALMIERI F, et al A systematic approach for threat and vulnerability analysis of unmanned aerial vehicles. Internet of Things, 2024, 26, 101180.
doi: 10.1016/j.iot.2024.101180 |
| 14 |
SINGH S, KUMAR S R, MUKHERJEE D Time-constrained interception with bounded field of view and input using barrier Lyapunov approach. Journal of Guidance, Control, and Dynamics, 2024, 47 (2): 384- 393.
doi: 10.2514/1.G007770 |
| 15 |
CHANG I C, YEN C E, CHANG H F, et al An integrated YOLOv5 and hierarchical human-weight-first path planning approach for efficient UAV searching systems. Machines, 2024, 12 (1): 65.
doi: 10.3390/machines12010065 |
| 16 |
LIN S G, GARRATT M A, LAMBERT A J Monocular vision-based real-time target recognition and tracking for autonomously landing a UAV in a cluttered shipboard environment. Autonomous Robots, 2017, 41 (4): 881- 901.
doi: 10.1007/s10514-016-9564-2 |
| 17 |
HART P E, NILSSON N J, RAPHAEL B A formal basis for the heuristic determination of minimum cost paths. IEEE Trans. on Systems Science and Cybernetics, 1968, 4 (2): 100- 107.
doi: 10.1109/TSSC.1968.300136 |
| 18 | STENTZ A The focused D* algorithm for real-time replanning. Proc. of the International Joint Conference on Artificial Intelligence, 1995, 95, 1652- 1659. |
| 19 |
HARABOR D, GRASTIEN A Online graph pruning for pathfinding on grid maps. Proc. of the AAAI Conference on Artificial Intelligence, 2011, 1114- 1119.
doi: 10.1609/aaai.v25i1.7994 |
| 20 | KARAMAN S, WALTER M R, PEREZ A, et al. Anytime motion planning using the RRT*. Proc. of the IEEE International Conference on Robotics and Automation, 2011: 1478−1483. |
| 21 | BOHLIN R, KAVRAKI L E. Path planning using lazy PRM. Proc. of the IIEEE International Conference on Robotics and Automation, 2000: 521−528. |
| 22 | SRILAKSHMI K, RAO G S, SWARNASRI K, et al. Optimization of ANFIS controller for solar/battery sources fed UPQC using a hybrid algorithm. Electrical Engineering, 2024, 106: 3743−3770. |
| 23 |
QUAN Q, GAO Y, BAI C G Distributed control for a robotic swarm to pass through a curve virtual tube. Robotics and Autonomous Systems, 2023, 162, 104368.
doi: 10.1016/j.robot.2023.104368 |
| 24 |
GAO Y, BAI C G, ZHANG L, et al Multi-UAV cooperative target encirclement within an annular virtual tube. Aerospace Science and Technology, 2022, 128, 107800.
doi: 10.1016/j.ast.2022.107800 |
| 25 | MAO P D, QUAN Q. Making robotics swarm flow more smoothly: a regular virtual tube model. Proc. of the IEEE/RSJ International Conference on Intelligent Robots and Systems, 2022: 4498−4504. |
| 26 |
GLADIS K P A, MADAVARAPU J B, KUMAR R R, et al In-out YOLO glass: indoor-outdoor object detection using adaptive spatial pooling squeeze and attention YOLO network. Biomedical Signal Processing and Control, 2024, 91, 105925.
doi: 10.1016/j.bspc.2023.105925 |
| 27 |
ALRUWAILI M, SIDDIQI M H, ATTA M N, et al Deep learning and ubiquitous systems for disabled people detection using YOLO models. Computers in Human Behavior, 2024, 154, 108150.
doi: 10.1016/j.chb.2024.108150 |
| 28 | MINAEIAN S, LIU J, SON Y J Vision-based target detection and localization via a team of cooperative UAV and UGVs. IEEE Trans. on Systems, Man, and Cybernetics: Systems, 2015, 46 (7): 1005- 1016. |
| 29 |
BEHDAD Z, DEMIR O T, SUNG K W, et al Multi-static target detection and power allocation for integrated sensing and communication in cell-free massive MIMO. IEEE Trans. on Wireless Communications, 2024, 23 (9): 11580- 11596.
doi: 10.1109/TWC.2024.3383209 |
| 30 |
AYDIN B, SINGHA S Drone detection using yolov5. Eng, 2023, 4 (1): 416- 433.
doi: 10.3390/eng4010025 |
| 31 |
MIRANDA-MOYA A, CASTANEDA H, WANG H S Fixed-time differentiator-based adaptive nonsingular fast terminal image-based visual servoing for a quadrotor UAV subject to turbulent wind. IEEE Trans. on Aerospace and Electronic Systems, 2024, 60 (3): 2807- 2818.
doi: 10.1109/TAES.2024.3354229 |
| 32 |
AHMAD K, PARK J E, ILYAS T, et al Accurate and robust pollinations for watermelons using intelligence guided visual servoing. Computers and Electronics in Agriculture, 2024, 219, 108753.
doi: 10.1016/j.compag.2024.108753 |
| 33 | QUAN Q. Introduction to multicopter design and control. Singapore: Springer, 2017. |
| 34 | CHAUMETTE F, HUTCHINSON S. Visual servo control. I. basic approaches. IEEE Robotics & Automation Magazine, 2006, 13(4): 82−90. |
| 35 | YANG K, QUAN Q. An autonomous intercept drone with image-based visual servo. Proc. of the IEEE International Conference on Robotics and Automation, 2020: 2230−2236. |
| 36 |
DANIELSSON P E Euclidean distance mapping. Computer Graphics and Image Processing, 1980, 14 (3): 227- 248.
doi: 10.1016/0146-664X(80)90054-4 |
| 37 |
DAI X H, KE C X, QUAN Q, et al RFlySim: automatic test platform for UAV autopilot systems with FPGA-based hardware-in-the-loop simulations. Aerospace Science and Technology, 2021, 114, 106727.
doi: 10.1016/j.ast.2021.106727 |
| 38 | WANG S, DAI X H, KE C X, et al. RflySim: a rapid multicopter development platform for education and research based on Pixhawk and MATLAB. Proc. of the International Conference on Unmanned Aircraft Systems, 2021: 1587−1594. |
| [1] | Yan GAO, Chenggang BAI, Quan QUAN. A survey on passing-through control of multi-robot systems in cluttered environments [J]. Journal of Systems Engineering and Electronics, 2025, 36(4): 1037-1056. |
| [2] | Delong WU, Hao FANG, Yiren HAO, Aobo WANG. Outdoor navigation of millimeter-wave radar quadrotors based on optimal virtual tube [J]. Journal of Systems Engineering and Electronics, 2025, 36(4): 1057-1067. |
| [3] | Jiacheng TANG, Zixiao YANG, Lei ZHANG, Tianjiang HU, Bo ZHU. Regular virtual tube for cooperative transportation of a payload by multiple quadrotors [J]. Journal of Systems Engineering and Electronics, 2025, 36(4): 1068-1076. |
| [4] | Guoqing SHI, Boyan ZHANG, Jiandong ZHANG, Qiming YANG, Xiaofeng HUANG, Jianyao QUE, Junwei PU, Xiutang GENG. Manipulator tracking technology based on FSRUKF [J]. Journal of Systems Engineering and Electronics, 2024, 35(2): 473-484. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||