
Journal of Systems Engineering and Electronics ›› 2025, Vol. 36 ›› Issue (2): 569-579.doi: 10.23919/JSEE.2025.000036
• CONTROL THEORY AND APPLICATION • Previous Articles
Enjiao ZHAO1,*( ), Xue DING1(), Ke ZHANG2(), Zengyu YUAN3()
), Xue DING1(), Ke ZHANG2(), Zengyu YUAN3()
Received:2024-05-08
Online:2025-04-18
Published:2025-05-20
Contact:
Enjiao ZHAO
E-mail:zhaoenjiao935@163.com;dingxue991218@163.com;zk961020@163.com;navalyu@163.com
About author:Supported by:Enjiao ZHAO, Xue DING, Ke ZHANG, Zengyu YUAN. Fixed-time cooperative interception guidance law with angle constraints for multiple flight vehicles[J]. Journal of Systems Engineering and Electronics, 2025, 36(2): 569-579.
Add to citation manager EndNote|Reference Manager|ProCite|BibTeX|RefWorks
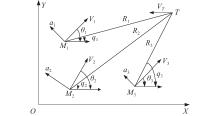
Fig 1
Relative motion relationship between the flight vehicles and the target"
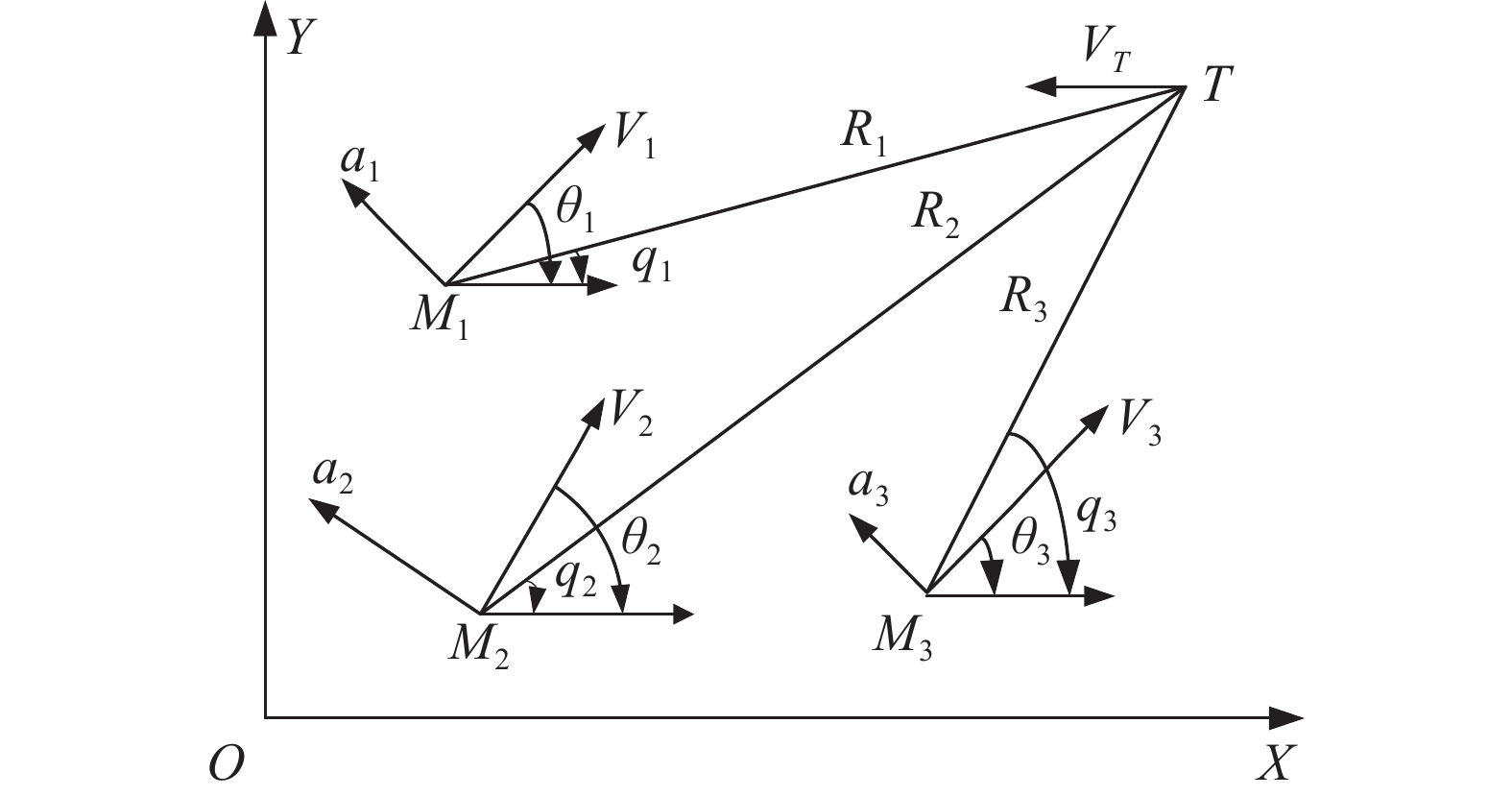
Table 1
Flight vehicle initial state parameters"
| Vehicle | X/m | Y/m | V/(m/s) | θ/(°) |
| Target | 30 | −150 | ||
| Vehicle 1 | 0 | 200 | 240 | 30 |
| Vehicle 2 | 0 | 0 | 240 | 30 |
| Vehicle 3 | 0 | −200 | 240 | 30 |
Fig 2
Communication topology diagram"
Table 2
Parameter table"
| Parameter | Value |
| 0.01 | |
| 60 | |
| 0.8 | |
| 60 | |
| 0.8 | |
| 1.2 | |
| 0.6 | |
| 1.2 | |
| 0.6 | |
| 1.1 | |
| 0 |
Fig 3
LOS angle of flight vehicle"
Fig 4
Impact angle error"
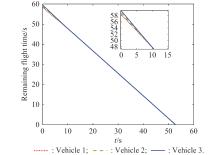
Fig 5
Flight vehicle remaining flight time"
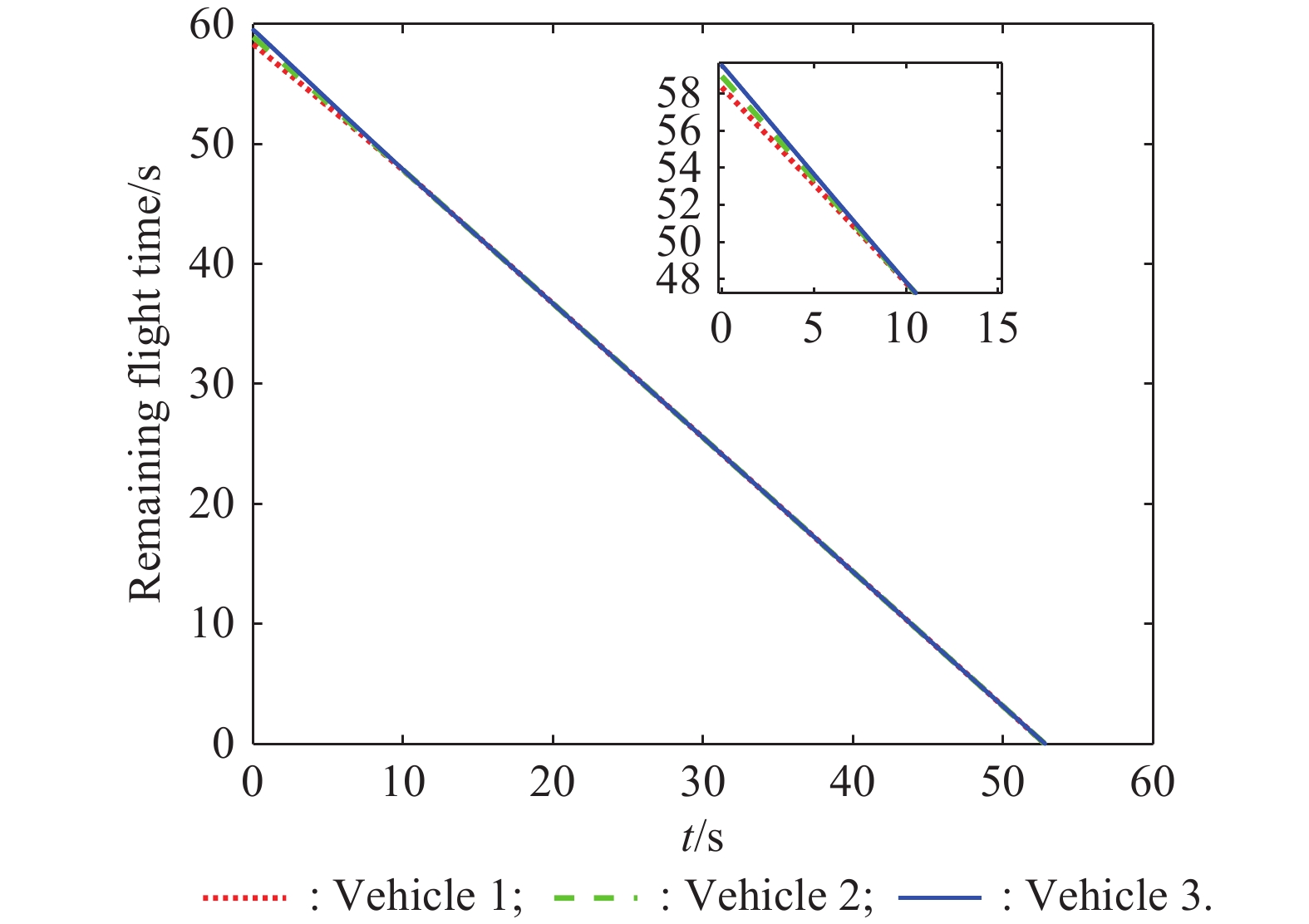
Fig 6
Flight vehicle normal acceleration"
Fig 7
Normal overload"
Fig 8
Relative distance between the vehicle and the target"
Table 3
Comparison between guidance law and proportional guidance"
| Variable | This paper | Proportional guidance |
| Guidance time/s | 52.80 | 53.82 |
| Off target quantity/m |
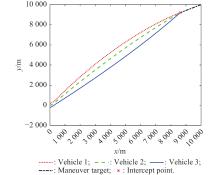
Fig 9
Relative ship between the relative motion of the flight vehicle and the target"
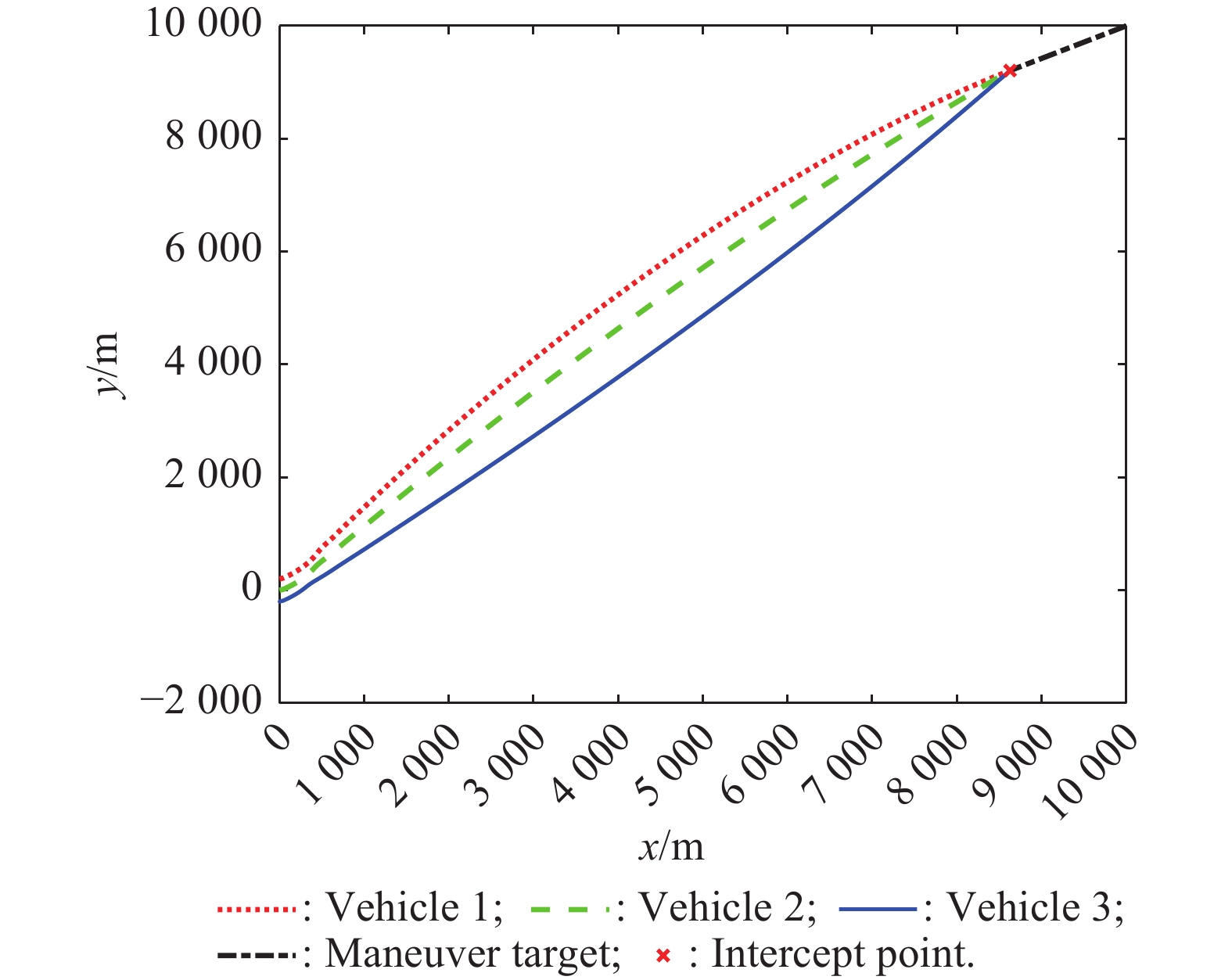
Fig 10
Relative distance between the flight vehicle and the target"
| 1 | ZHANG S, GUO Y, LIU Z G, et al Finite-time cooperative guidance strategy for impact angle and time control. IEEE Trans. on Aerospace and Electronic Systems, 2021, 2 (57): 806- 819. |
| 2 | CHENG Z T, SU M, LIU L, et al. A coordination law for multiple air vehicles in distributed communication scenarios. Journal of Advanced Transportation, 2020, 2020: 1810962. |
| 3 |
LI G F, WU Y J Adaptive cooperative guidance with seeker-less followers: a position coordination-based framework. ISA Transactions, 2023, 143, 168- 176.
doi: 10.1016/j.isatra.2023.09.024 |
| 4 | AO L, HU X X, YANG S H, et al. Adaptive terminal time and impact angle constraint cooperative guidance strategy for multiple vehicles. Drones, 2024, 8(4): 134. |
| 5 | SHI P F, YU J L, DONG X Y, et al Distributed adaptive cooperative guidance against maneuvering targets with time-varying terminal angle constraint and overload saturation. Journal of the Franklin Institute, 2023, 360 (16): 11507- 11528. |
| 6 | LIU J H, YANG J Y An event-triggered optimal cooperative guidance law for simultaneous attacks with impact angle constraints. Optimal Control Applications and Methods, 2022, 43 (5): 1343- 1357. |
| 7 | CHEN S, MA D Y, YAO Y H, et al. Cooperative polynomial guidance law with collision avoidance and flight path angle coordination. Aerospace Science and Technology, 2022, 130: 107809. |
| 8 | LIU S X, YAN B B, ZHANG T, et al Coverage-based cooperative guidance law for intercepting hypersonic vehicles with overload constraint. Aerospace Science and Technology, 2022, 126, 107651. |
| 9 | CUI L, ZHEN Z, YANG J Y Fixed time cooperative scheme design for missiles salvo attack. IEEE Trans. on Circuits and Systems II-Express Briefs, 2024, 71 (2): 672- 676. |
| 10 | ZHANG Z, DONG X W, YV J L, et al Distributed cooperative tracking and cooperative guidance against maneuvering aerial target. Aerospace Science and Technology, 2024, 144, 108827. |
| 11 | YU J L, SHI Z X, DONG X W, et al Impact time consensus cooperative guidance against the maneuvering target: theory and experiment. IEEE Trans. on Aerospace and Electronic Systems, 2023, 59 (4): 4590- 4603. |
| 12 | GONG M, ZHOU S T, ZHOU D Optimal sliding mode guidance law against maneuvering target with impact angle constraint. Journal of Aerospace Engineering, 2024, 238 (5): 513- 528. |
| 13 | CHEN Y D, WANG J N, SHAN J Y, et al Cooperative guidance for multiple powered missiles with constrained impact and bounded speed. Journal of Guidance, Control, and Dynamics, 2021, 44 (4): 825- 841. |
| 14 | DONG F, ZHANG X Y, HE K P, et al A new three-dimensional adaptive sliding mode guidance law for maneuvering target with actuator fault and terminal angle constraints. Aerospace Science and Technology, 2022, 131, 107974. |
| 15 | YOU H, ZHAO J F, LI P, et al Nonsingular fast terminal second-order sliding mode guidance law with impact angle constraints. Journal of Projectiles, Rockets, Missiles and Guidance, 2019, 39 (6): 155- 159. |
| 16 | ZHANG X Y, ZHANG P, ZHENG X, et al Terminal angle constraint sliding mode guidance law design based on fixed-time convergence. Air & Space Defense, 2020, 3 (3): 9- 15. |
| 17 | SUN X J, ZHOU R, WU J Distributed cooperative guidance and control for multiple missiles. Journal of Beijing University of Aeronautics and Astronautics, 2014, 40 (1): 120- 124. |
| 18 |
WANG L, ZOU M, GUO W L, et al Adaptive discontinuous control for fixed-time consensus of nonlinear multi-agent systems. Electronics, 2022, 11 (21): 3545.
doi: 10.3390/electronics11213545 |
| 19 | GUTMAN S Impact-time vector guidance. Journal of Guidance Control & Dynamics, 2017, 40 (8): 2110- 2114. |
| 20 | ZHANG N, GAI W D, ZHONG M Y, et al A fast finite-time convergent guidance law with nonlinear disturbance observer for unmanned aerial vehicles collision avoidance. Aerospace Science & Technology, 2019, 86, 204- 214. |
| 21 |
ZHANG H G, HAN J, LUO C M, et al Fault-tolerant control of a nonlinear system based on generalized fuzzy hyperbolic model and adaptive disturbance observer. IEEE Trans. on Systems, Man, and Cybernetics: Systems, 2017, 47 (8): 2289- 2300.
doi: 10.1109/TSMC.2017.2652499 |
| 22 | GONZALEZ A, BALAGUER V, CARCIA P, et al Gain-scheduled predictive extended state observer for time-varying delays systems with mismatched disturbances. ISA transactions, 2018, 84, 206- 213. |
| 23 |
ZHANG Y, TANG S J, GUO J Adaptive terminal angle constraint interception against maneuvering targets with fast fixed-time convergence. International Journal of Robust and Nonlinear Control, 2018, 28 (8): 2996- 3014.
doi: 10.1002/rnc.4067 |
| 24 | CUI L, JIN N, CHANG S P, et al Fixed-time ESO based fixed-time integral terminal sliding mode controller design for a missile. ISA Transactions, 2021, 125, 237- 251. |
| 25 | HONG H F, YU W W, WEN G H, et al Distributed robust fixed-time consensus for nonlinear and disturbed multiagent systems. IEEE Trans. on Systems, 2017, 47 (7): 1464- 1473. |
| 26 |
POLYAKOV A Nonlinear feedback design for fixed-time stabilization of linear control systems. IEEE Trans. on Automatic Control, 2012, 57 (8): 2106- 2110.
doi: 10.1109/TAC.2011.2179869 |
| 27 | MA K M, MA J Design and implementation of variable structure guidance law for maneuvering target interception. Journal of Astronautics, 2010, 31 (6): 1589- 1595. |
| 28 |
YANG L, YANG J Y Nonsingular fast terminal sliding-mode control for nonlinear dynamical systems. International Journal of Robust and Nonlinear Control, 2011, 21 (16): 1865- 1879.
doi: 10.1002/rnc.1666 |
| 29 | TIAN Y, CAI Y L, DENG Y F A fast nonsingular terminal sliding mode control method for nonlinear systems with fixed-time stability guarantees. Journal of Chinese Inertail Technology, 2020, 28 (5): 677- 685. |
| 30 |
ZHANG P, LIU H T, LI X B, et al Fault tolerance of cooperative interception using multiple flight vehicles. Journal of the Franklin Institute, 2013, 350 (9): 2373- 2395.
doi: 10.1016/j.jfranklin.2013.02.022 |
| 31 |
ZUO Z Y, TIAN B L, DEFOORT M, et al Fixed-time consensus tracking for multiagent systems with high-order integrator dynamics. IEEE Trans. on Automatic Control, 2018, 63 (2): 563- 570.
doi: 10.1109/TAC.2017.2729502 |
| [1] | Jiahui ZHANG, Qiuqiu WEN. Closed-form guidance law for velocity maximization with impact angle constraint [J]. Journal of Systems Engineering and Electronics, 2024, 35(5): 1295-1303. |
| [2] | Mengjing GAO, Tian YAN, Bingjie HAN, Haoyu CHENG, Wenxing FU, Bo HAN. Cooperative guidance law based on super-twisting observer for target maneuvering [J]. Journal of Systems Engineering and Electronics, 2024, 35(5): 1304-1314. |
| [3] | Yuanhe LIU, Nianhao XIE, Kebo LI, Yan’gang LIANG. Missile guidance law design based on free-time convergent error dynamics [J]. Journal of Systems Engineering and Electronics, 2024, 35(5): 1315-1325. |
| [4] | Jianping ZHOU, Wenjie ZHANG, Hang ZHOU, Qiang LI, Qunli XIA. Design of integral sliding mode guidance law based on disturbance observer [J]. Journal of Systems Engineering and Electronics, 2024, 35(1): 186-194. |
| [5] | Hang GUO, Zheng WANG, Bin FU, Kang CHEN, Wenxing FU, Jie YAN. Impact angle constrained fuzzy adaptive fault tolerant IGC method for Ski-to-Turn missiles with unsteady aerodynamics and multiple disturbances [J]. Journal of Systems Engineering and Electronics, 2022, 33(5): 1210-1226. |
| [6] | Shang SHI, Guosheng ZHANG, Huifang MIN, Yinlong HU, Yonghui SUN. Exact uncertainty compensation of linear systems by continuous fixed-time output-feedback controller [J]. Journal of Systems Engineering and Electronics, 2022, 33(3): 706-715. |
| [7] | Shengnan FU, Guanqun ZHOU, Qunli XIA. A trajectory shaping guidance law with field-of-view angle constraint and terminal limits [J]. Journal of Systems Engineering and Electronics, 2022, 33(2): 426-437. |
| [8] | Wei LI, Qiuqiu WEN, Lei HE, Qunli XIA. Three-dimensional impact angle constrained distributed cooperative guidance law for anti-ship missiles [J]. Journal of Systems Engineering and Electronics, 2021, 32(2): 447-459. |
| [9] | Biao YANG, Wuxing JING, Changsheng GAO. Three-dimensional cooperative guidance law for multiple missiles with impact angle constraint [J]. Journal of Systems Engineering and Electronics, 2020, 31(6): 1286-1296. |
| [10] | Yandong LI, Ling ZHU, Yuan GUO. Observer-based multivariable fixed-time formation control of mobile robots [J]. Journal of Systems Engineering and Electronics, 2020, 31(2): 403-414. |
| [11] | Wenjie ZHANG, Shengnan FU, Wei LI, Qunli XIA. An impact angle constraint integral sliding mode guidance law for maneuvering targets interception [J]. Journal of Systems Engineering and Electronics, 2020, 31(1): 168-184. |
| [12] | Xiaojian ZHANG, Mingyong LIU, Yang LI, Feihu ZHANG. Impact angle control over composite guidance law based on feedback linearization and finite time control [J]. Journal of Systems Engineering and Electronics, 2018, 29(5): 1036-1045. |
| [13] | Ran LI, Qiuqiu WEN, Wangchun TAN, Yijie ZHANG. Adaptive weighting impact angle optimal guidance law considering seeker's FOV angle constraints [J]. Journal of Systems Engineering and Electronics, 2018, 29(1): 142-151. |
| [14] | Wei Pang, Xiaofang Xie, and Tao Sun. Improved bias proportional navigation with multiple constraints for guide ammunition#br# [J]. Journal of Systems Engineering and Electronics, 2017, 28(6): 1193-1202. |
| [15] | Qingchun Li, Wensheng Zhang, Gang Han, and Yuan Xie. Fuzzy sliding mode control guidance law with terminal impact angle and acceleration constraints [J]. Systems Engineering and Electronics, 2016, 27(3): 664-679. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||