
Journal of Systems Engineering and Electronics ›› 2025, Vol. 36 ›› Issue (2): 537-551.doi: 10.23919/JSEE.2025.000035
• CONTROL THEORY AND APPLICATION • Previous Articles
Bowen XIAO( ), Qunli XIA()
), Qunli XIA()
Received:2024-04-16
Accepted:2025-03-03
Online:2025-04-18
Published:2025-05-20
Contact:
Qunli XIA
E-mail:1226775642@qq.com;1010@bit.edu.cn
About author:Bowen XIAO, Qunli XIA. Non-singular fast terminal sliding mode control for roll-pitch seeker based on extended state observers[J]. Journal of Systems Engineering and Electronics, 2025, 36(2): 537-551.
Add to citation manager EndNote|Reference Manager|ProCite|BibTeX|RefWorks
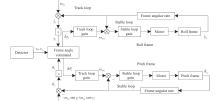
Fig 1
Schematic of the roll-pitch seeker control"
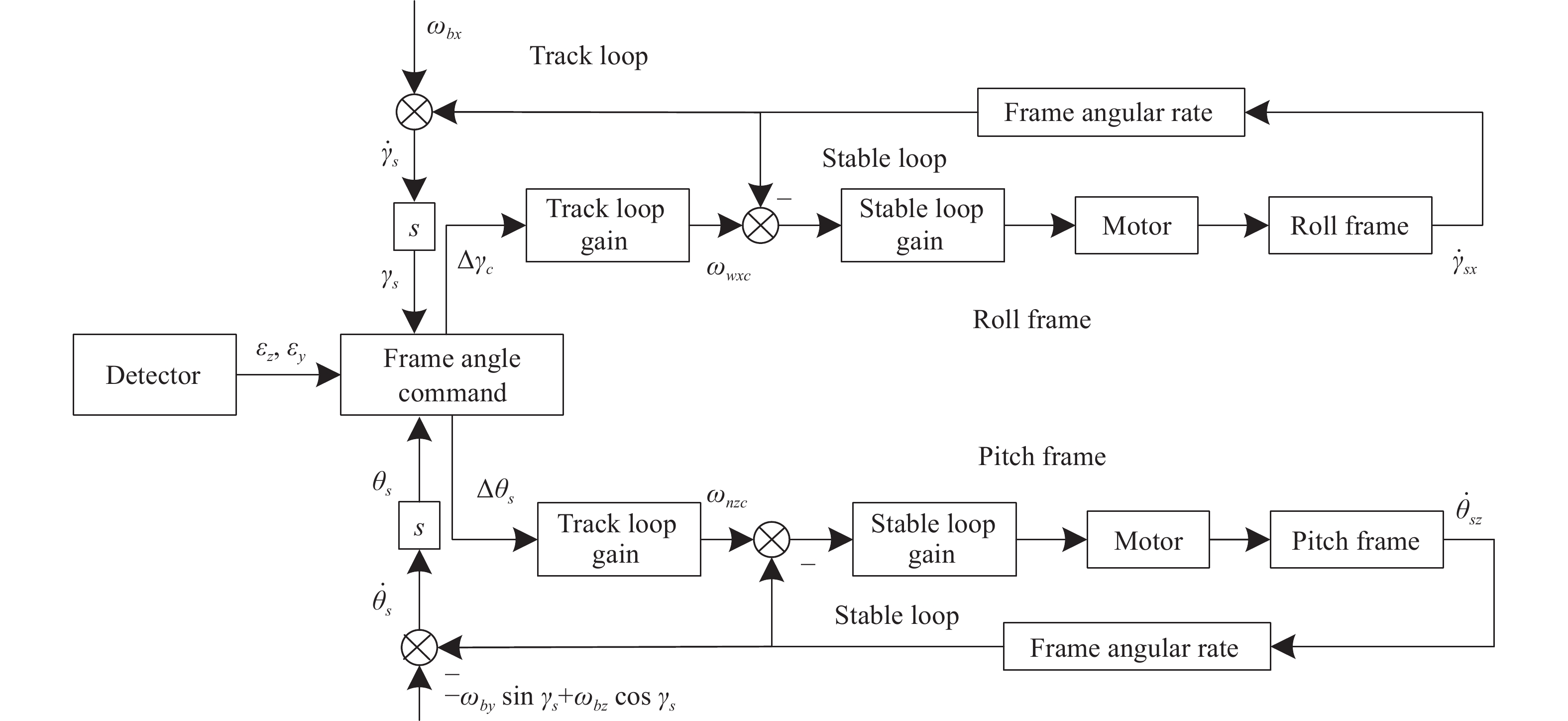
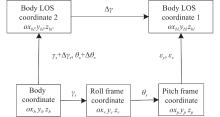
Fig 2
Coordinate system transformation"
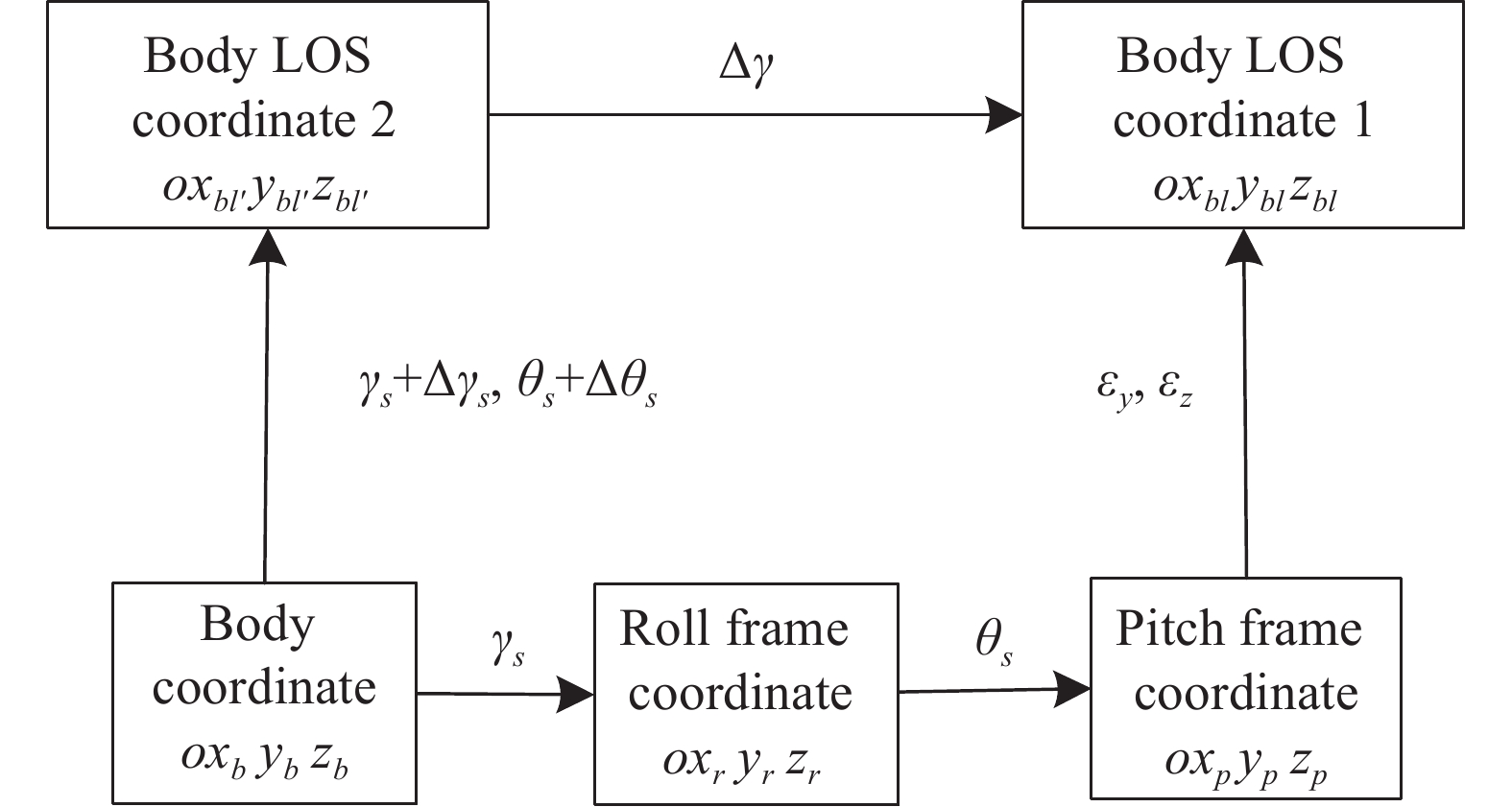
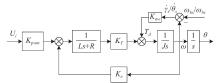
Fig 3
Schematic of the frame control model"
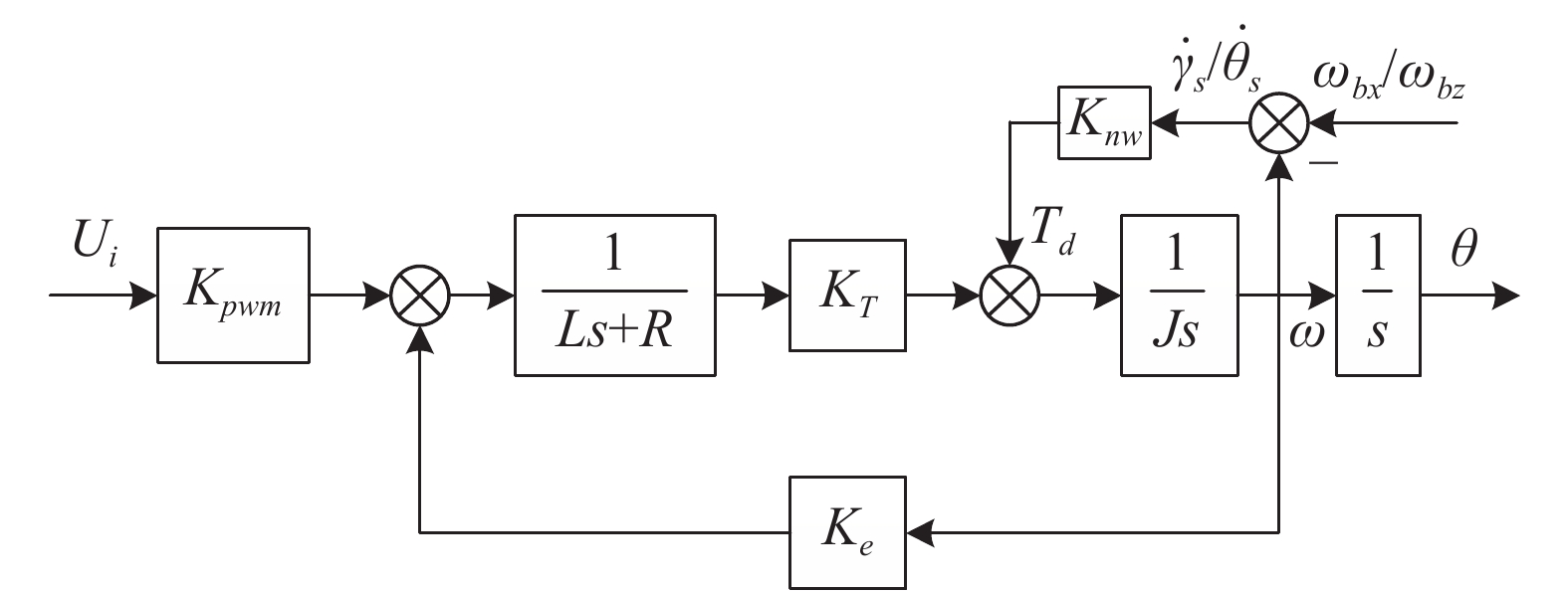
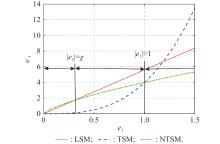
Fig 4
Convergence rates of different sliding modes"

Fig 5
Angle error convergence curves of different sliding mode surfaces"
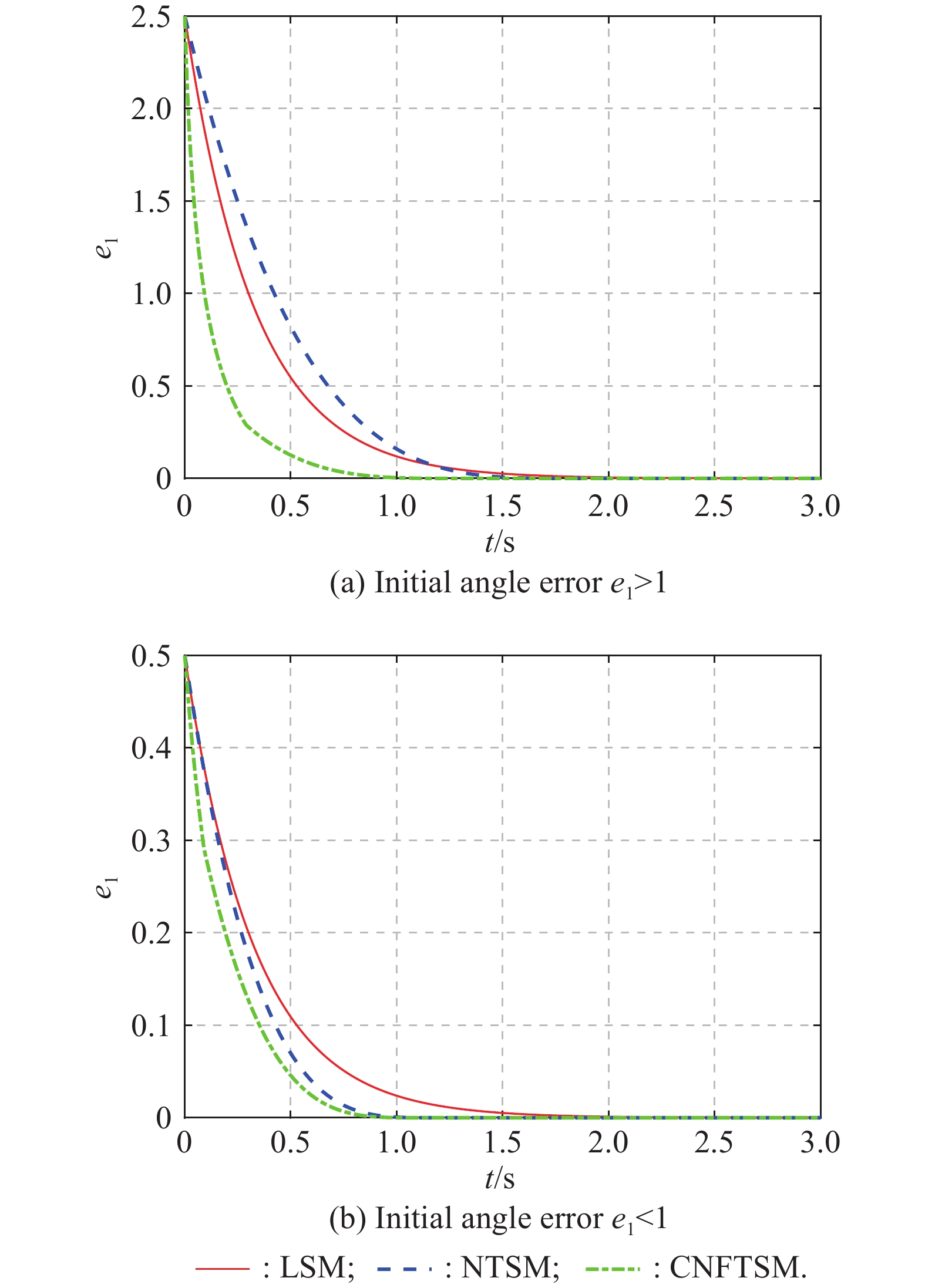

Fig 6
Different reaching laws converge curve when ${\boldsymbol{S}} {\boldsymbol{>}} {\boldsymbol{1}}$"
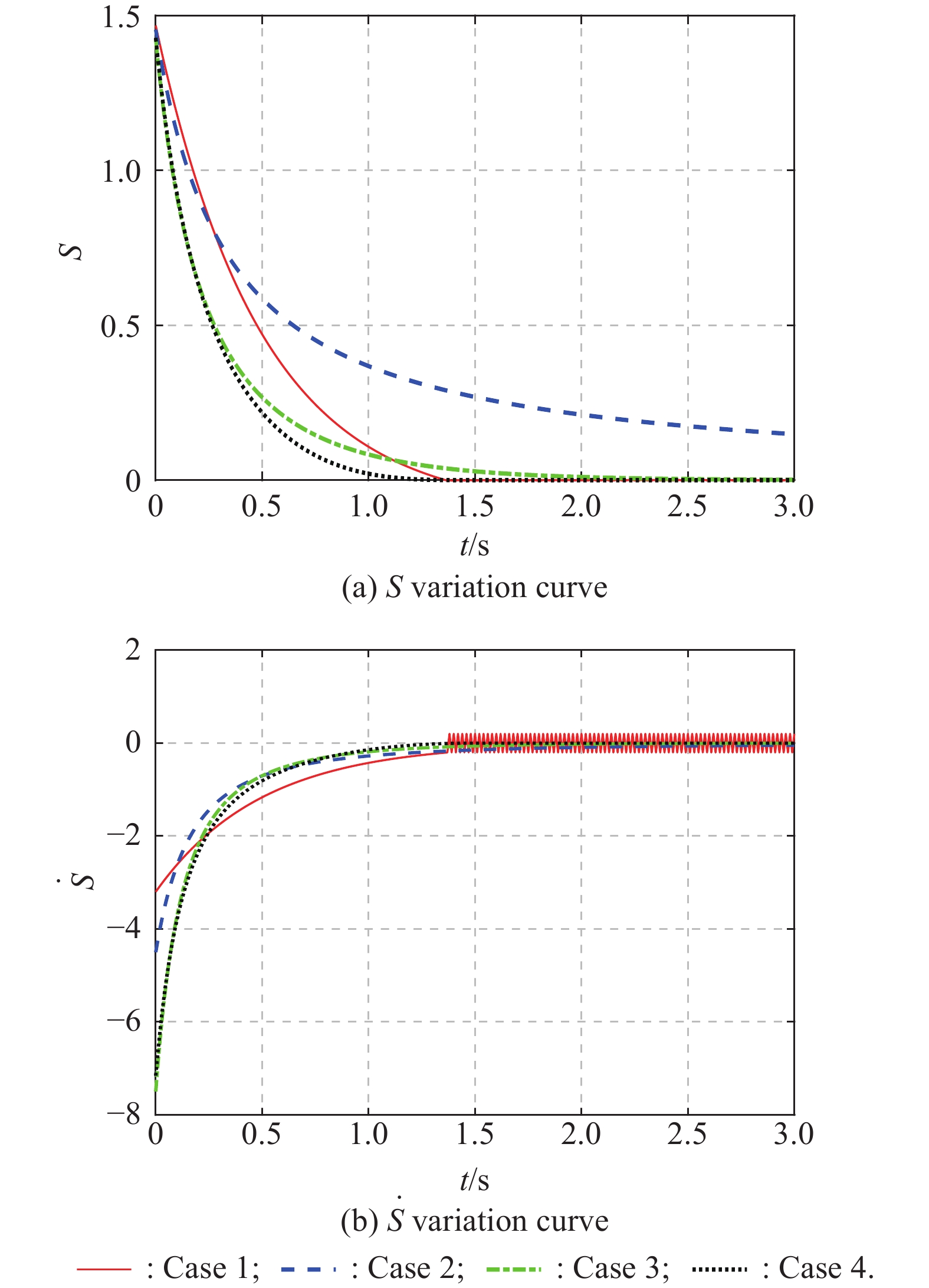

Fig 7
Different reaching laws converge curve when ${\boldsymbol{S}} {\boldsymbol{<}} {\boldsymbol{1}}$"
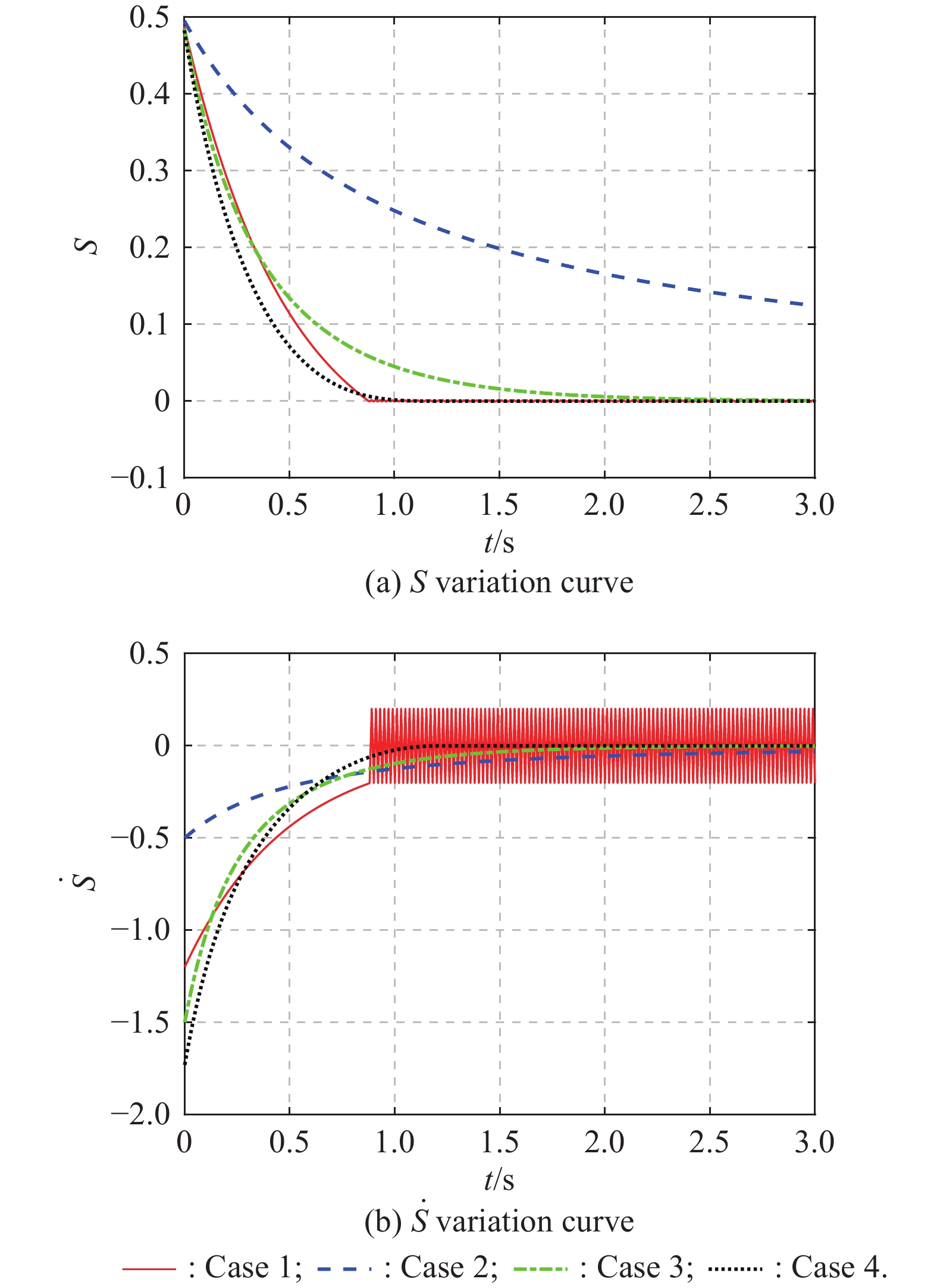
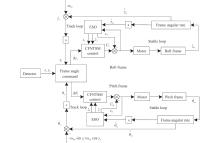
Fig 8
Block diagram of roll-pitch seeker control system"
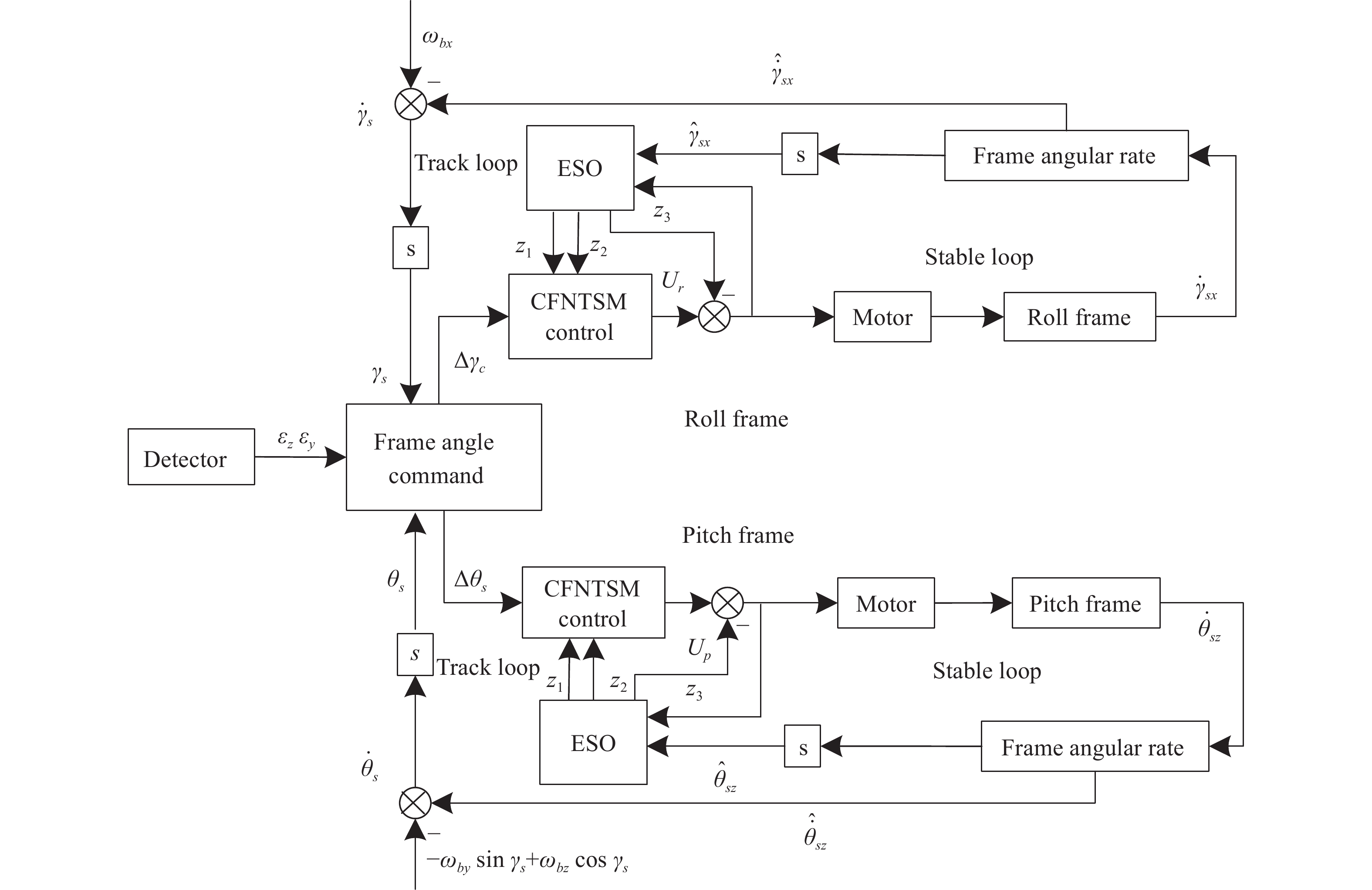
Fig 9
Roll frame angle (Case 1)"
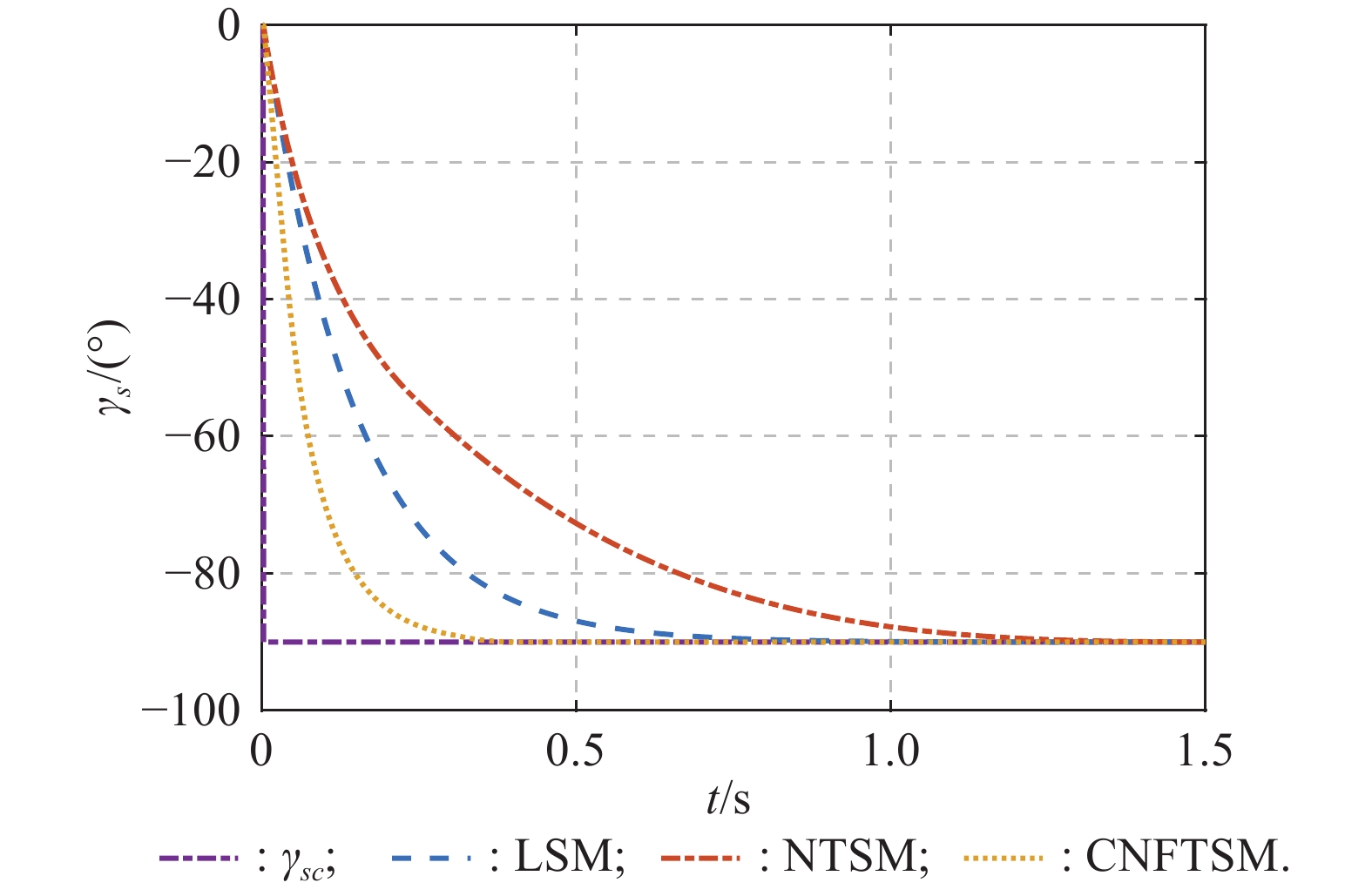
Fig 10
Pitch frame angle (Case 1)"
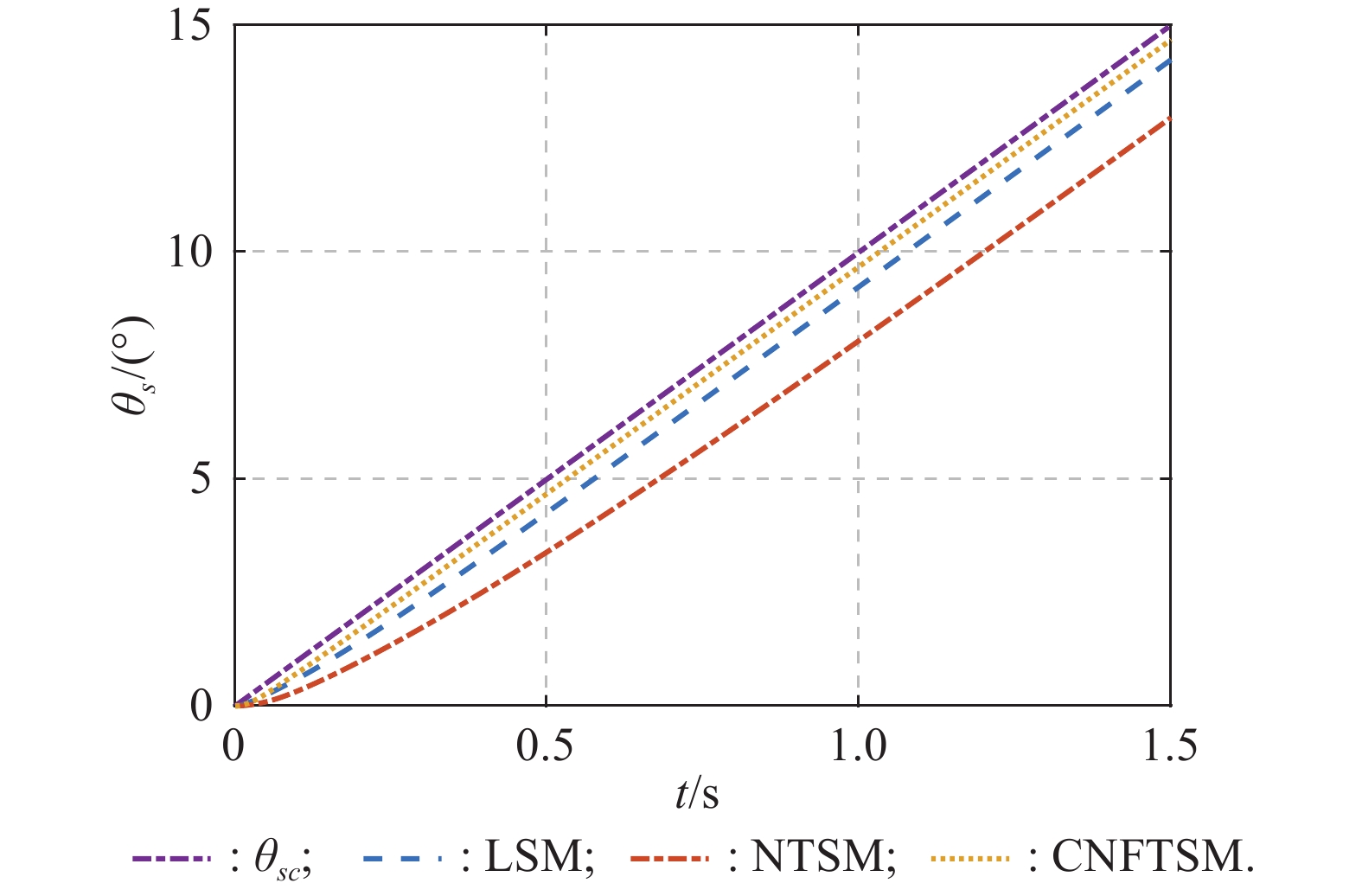
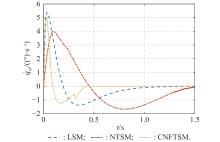
Fig 11
Pitch LOS angular velocity (Case 1)"
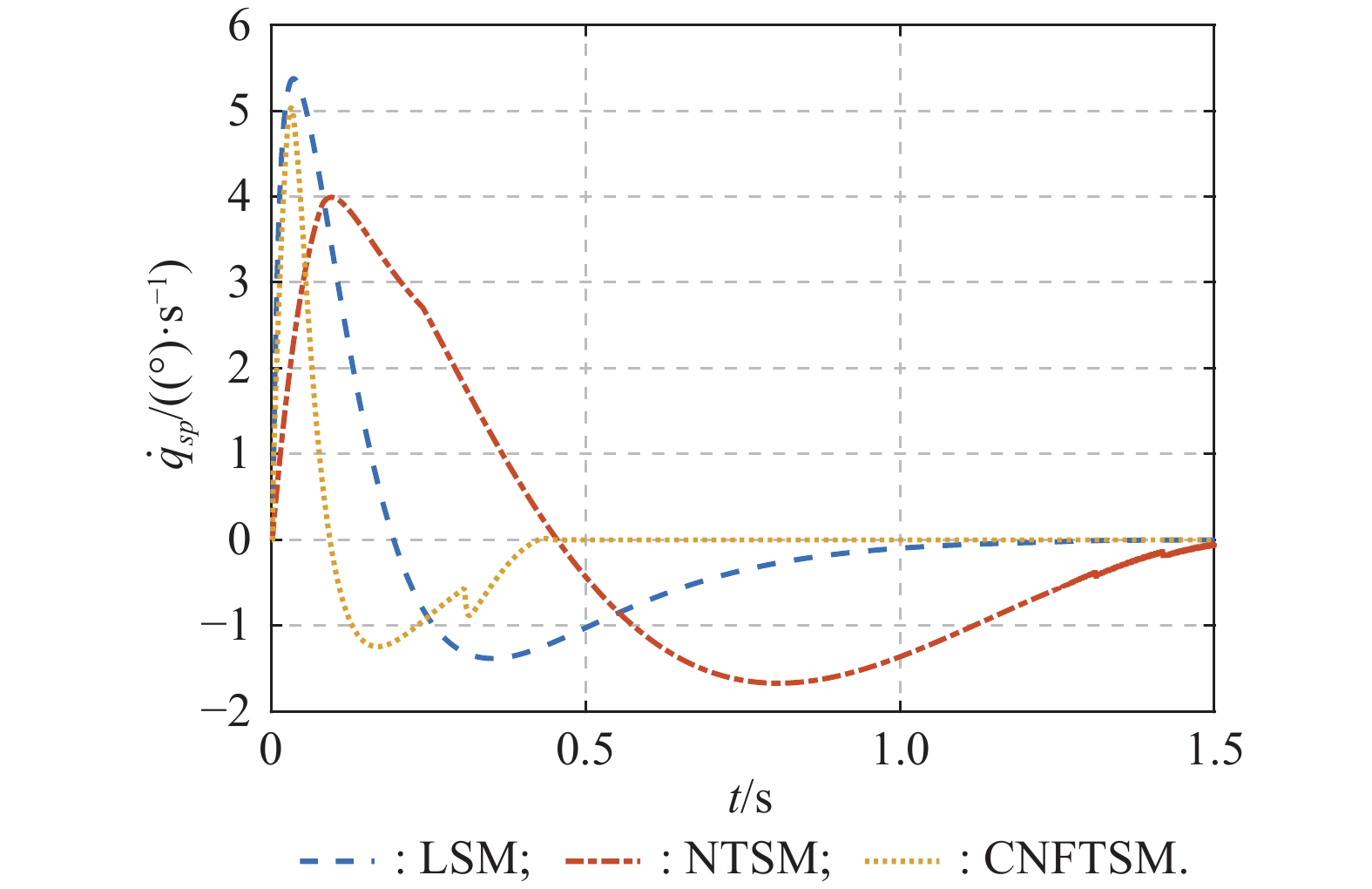
Fig 12
Yaw LOS velocity (Case 1)"
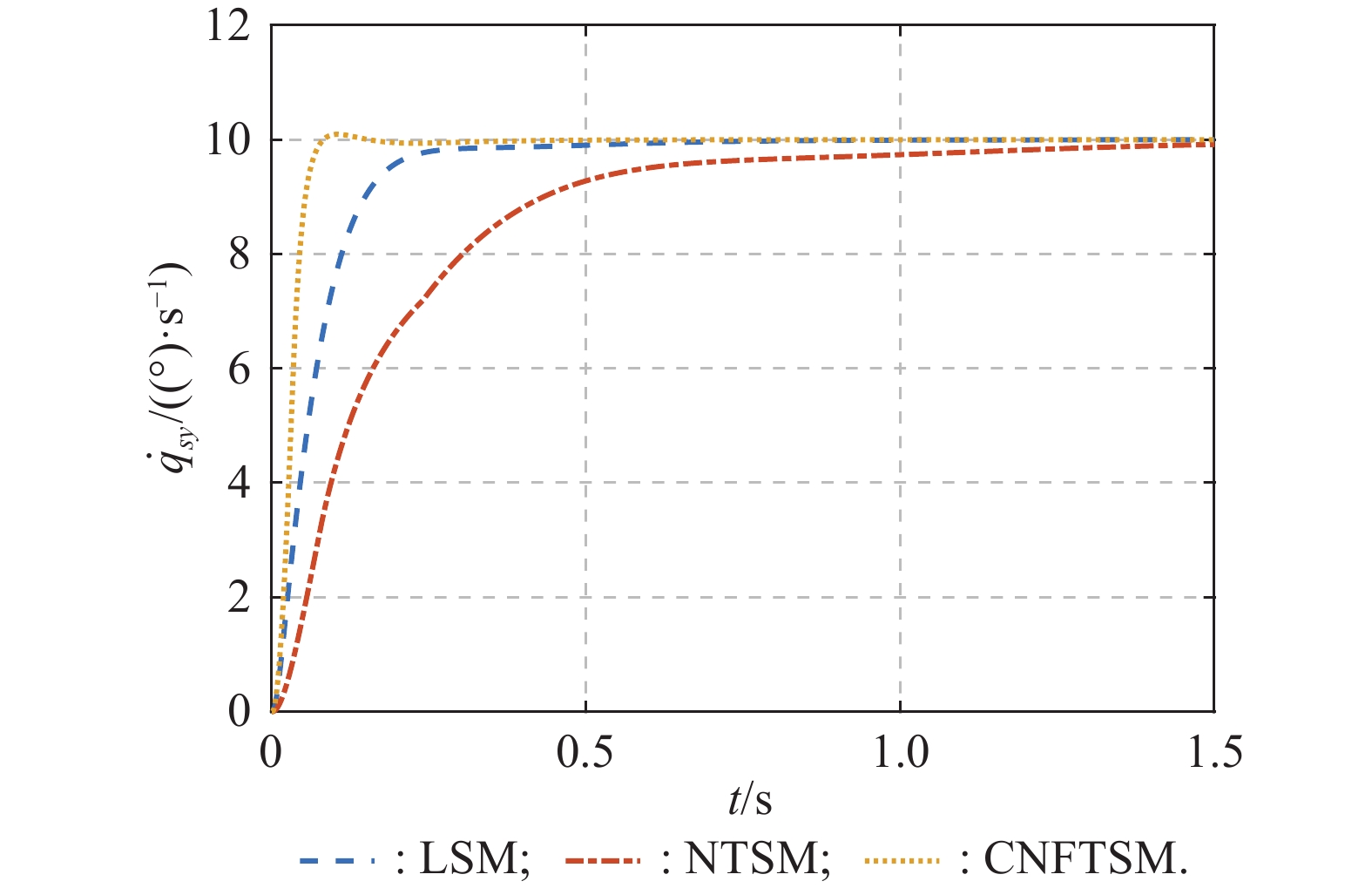
Fig 13
Roll frame angular velocity (Case 1)"
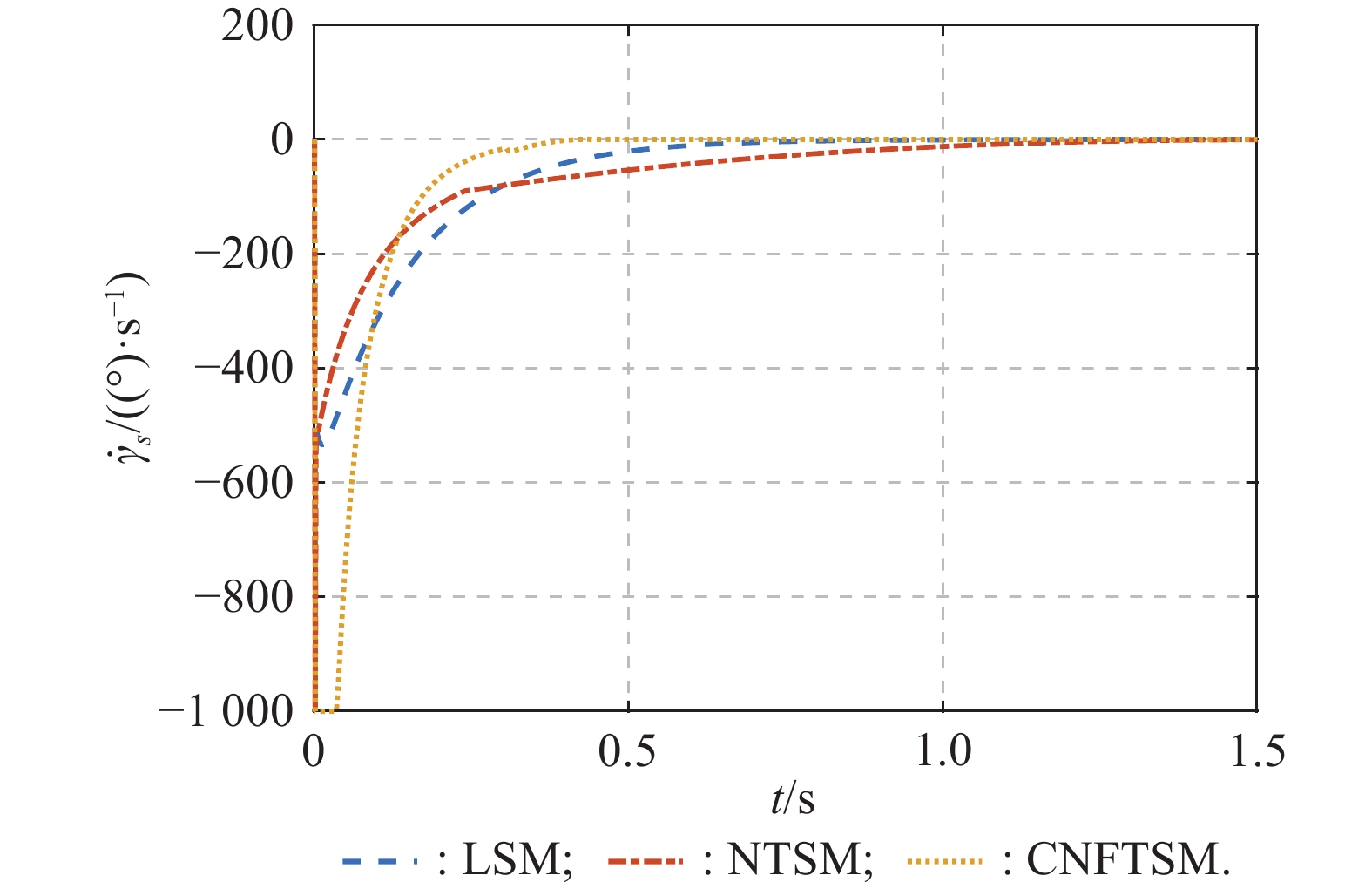
Fig 14
Pitch frame angular velocity (Case 1)"
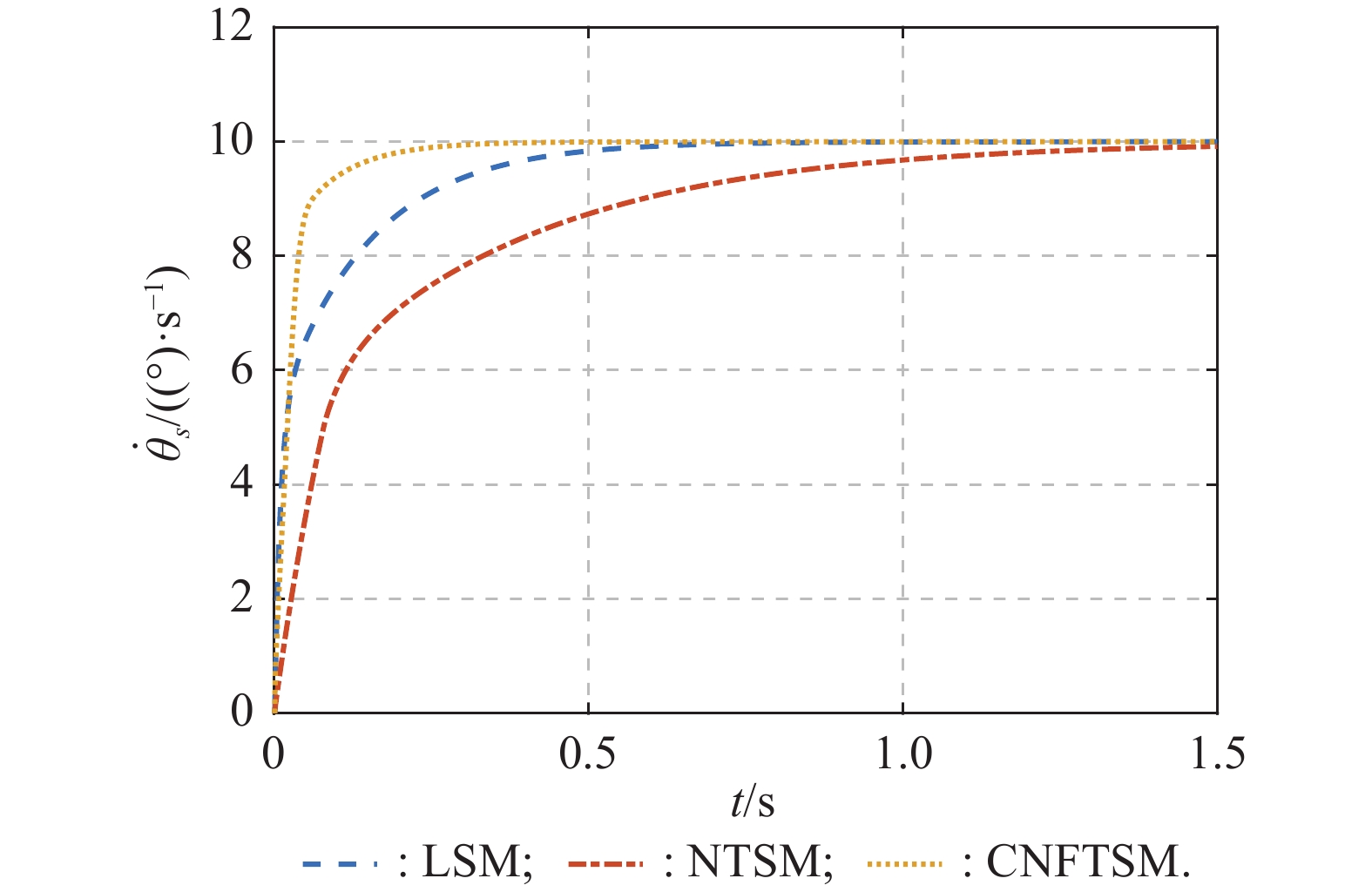
Fig 15
Detector error angle (Case 1)"
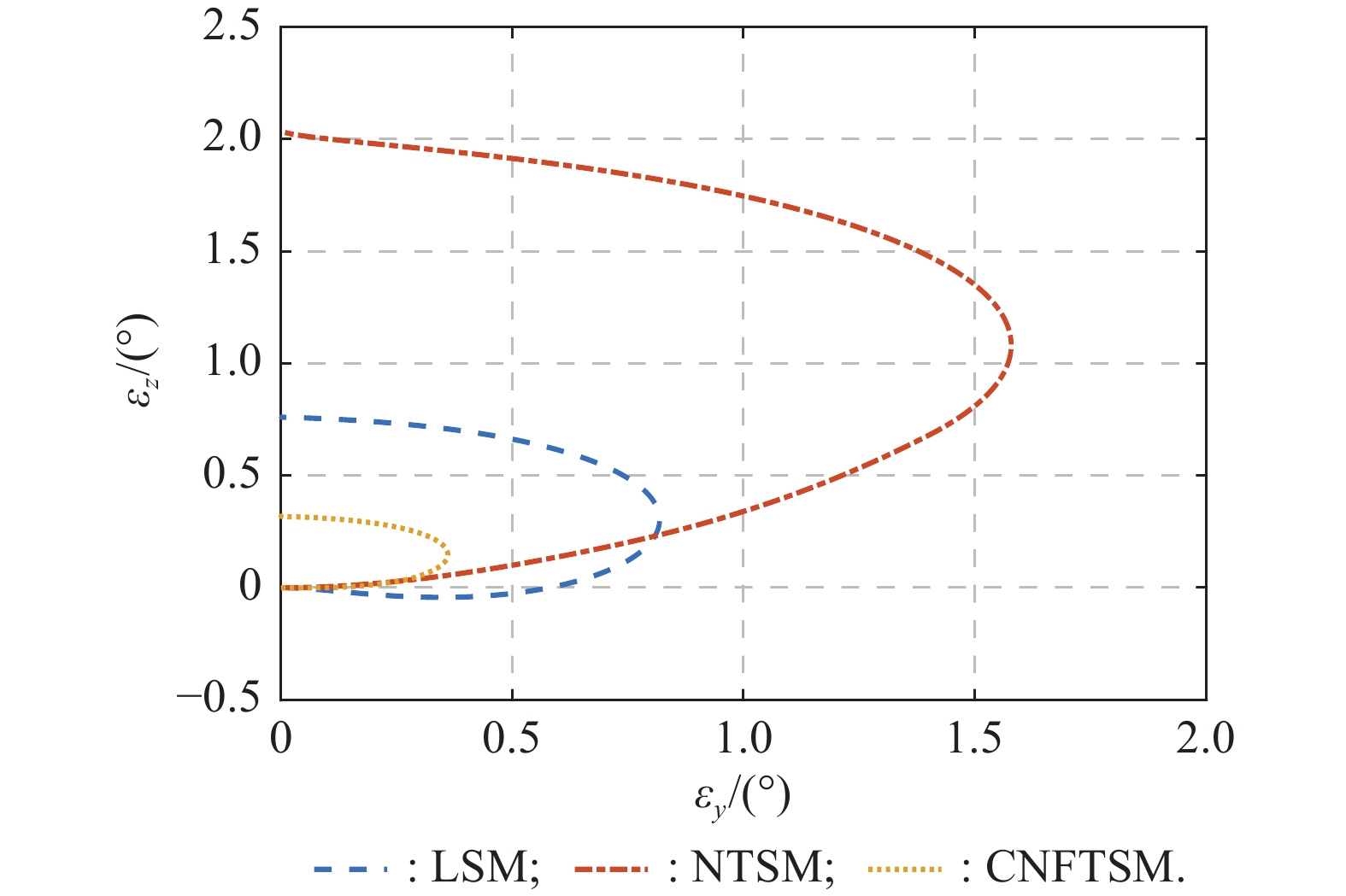
Fig 16
Roll frame angle (Case 2)"
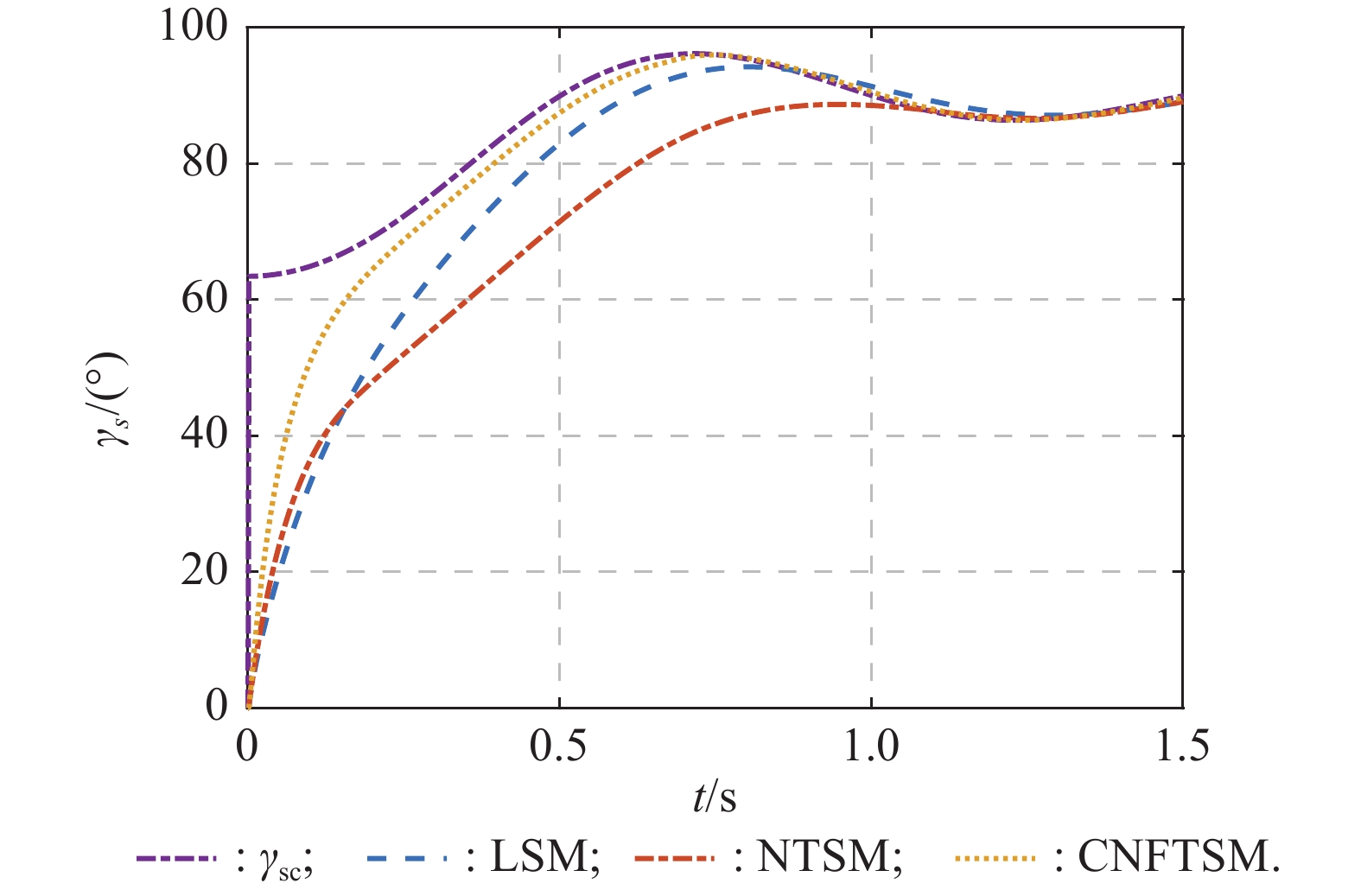
Fig 17
Pitch frame angle (Case 2)"
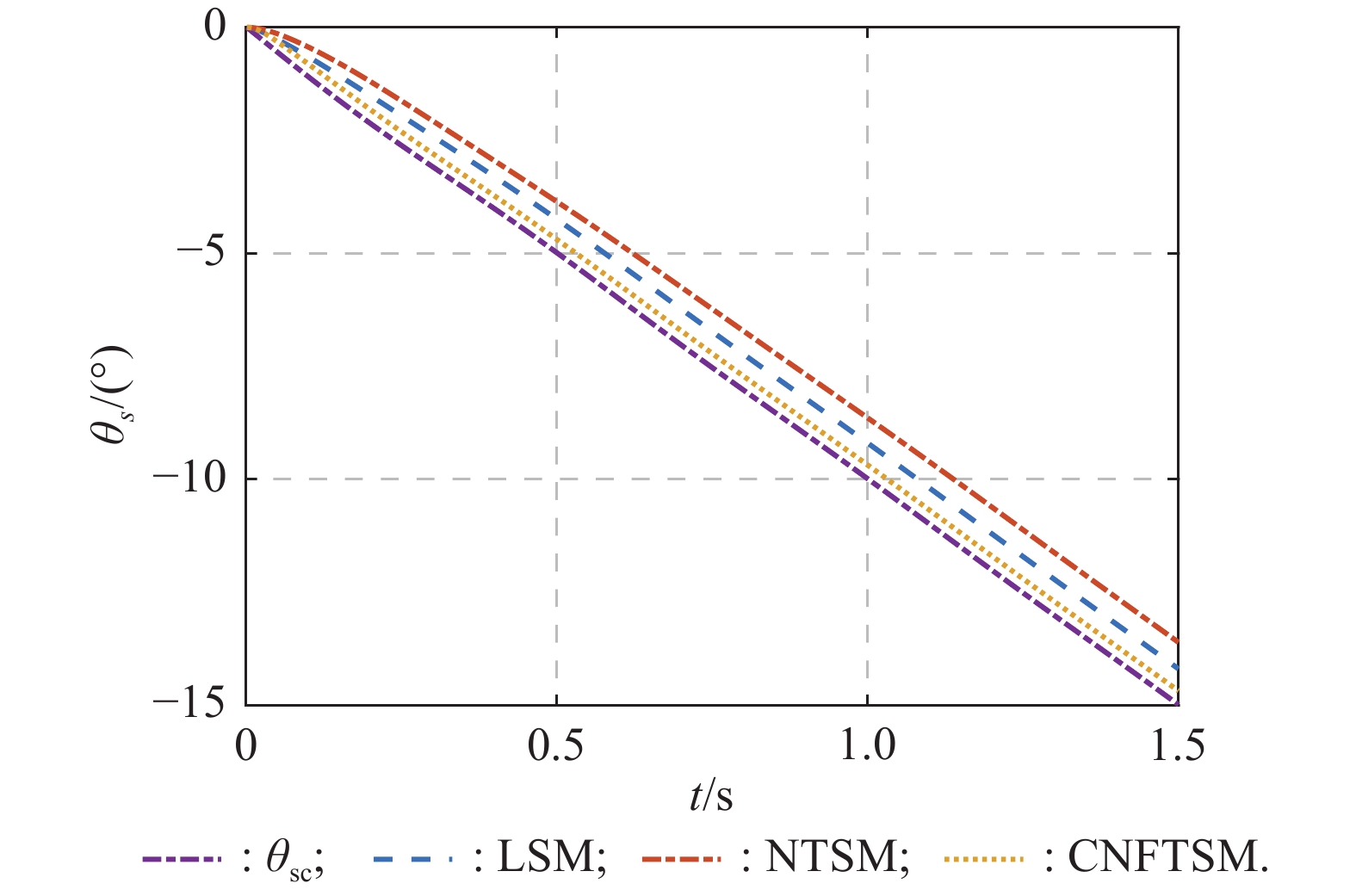
Fig 18
Pitch LOS velocity (Case 2)"
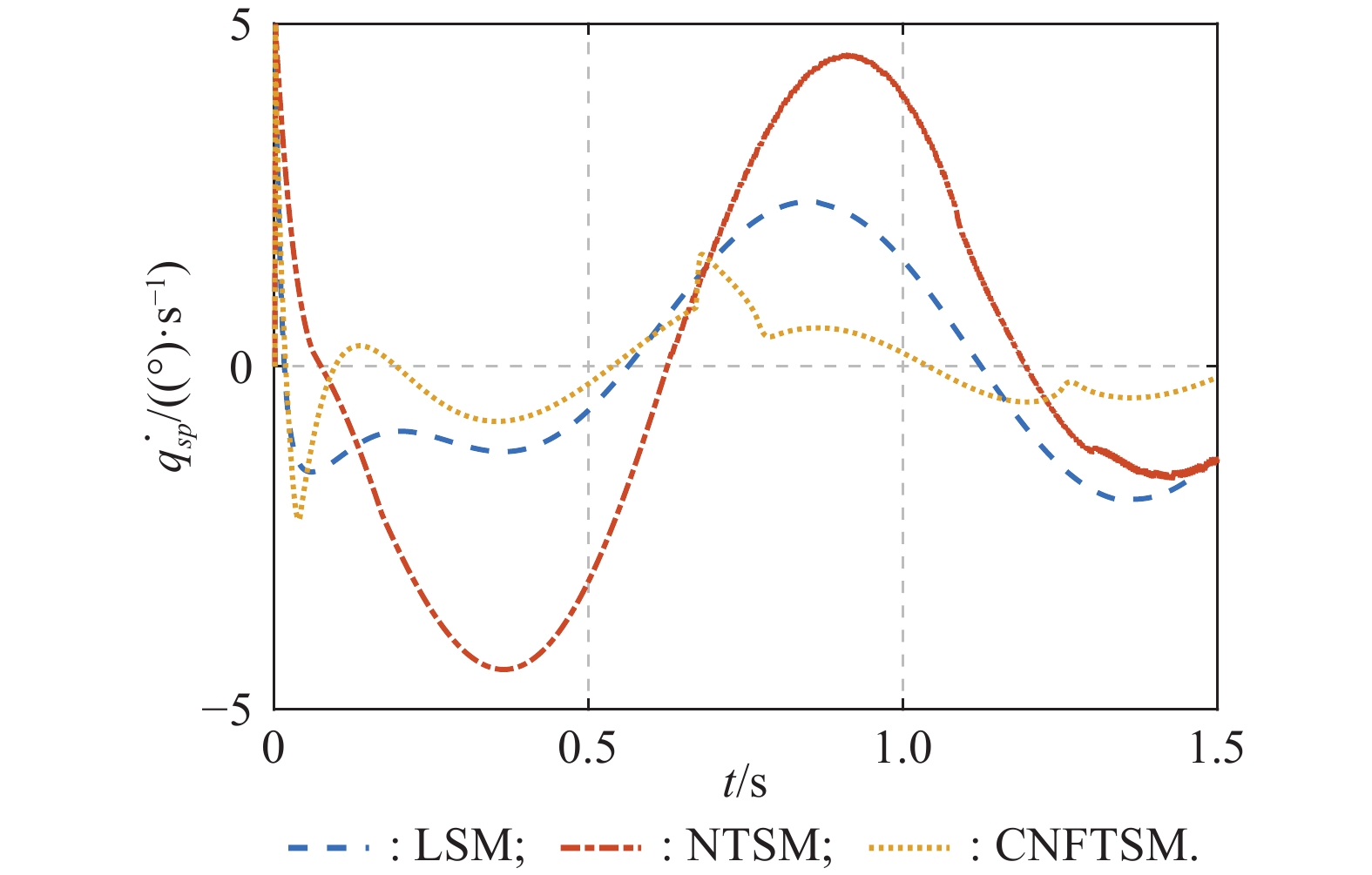
Fig 19
Yaw LOS angular velocity (Case 2)"
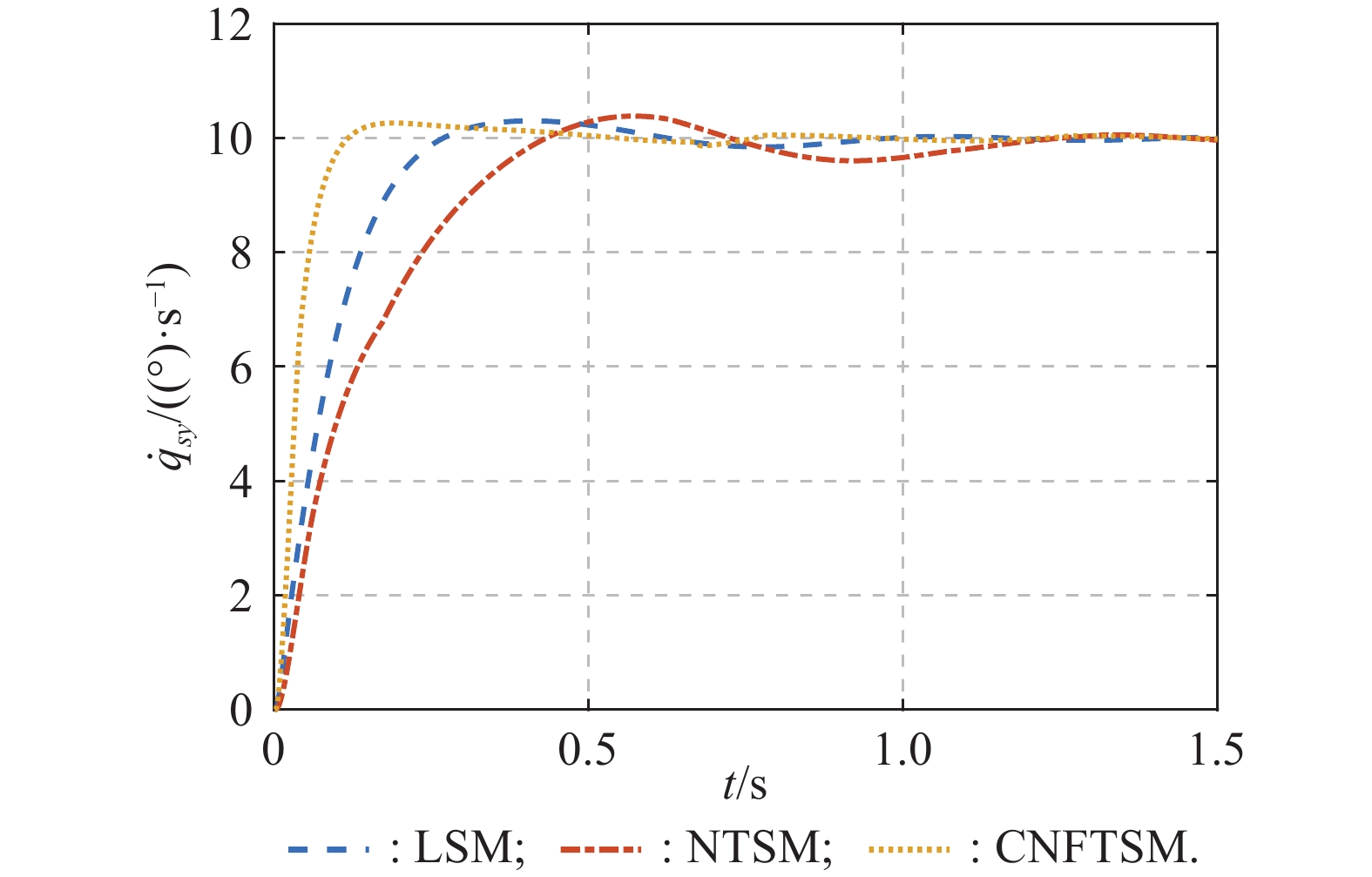
Fig 20
Roll frame angular velocity (Case 2)"
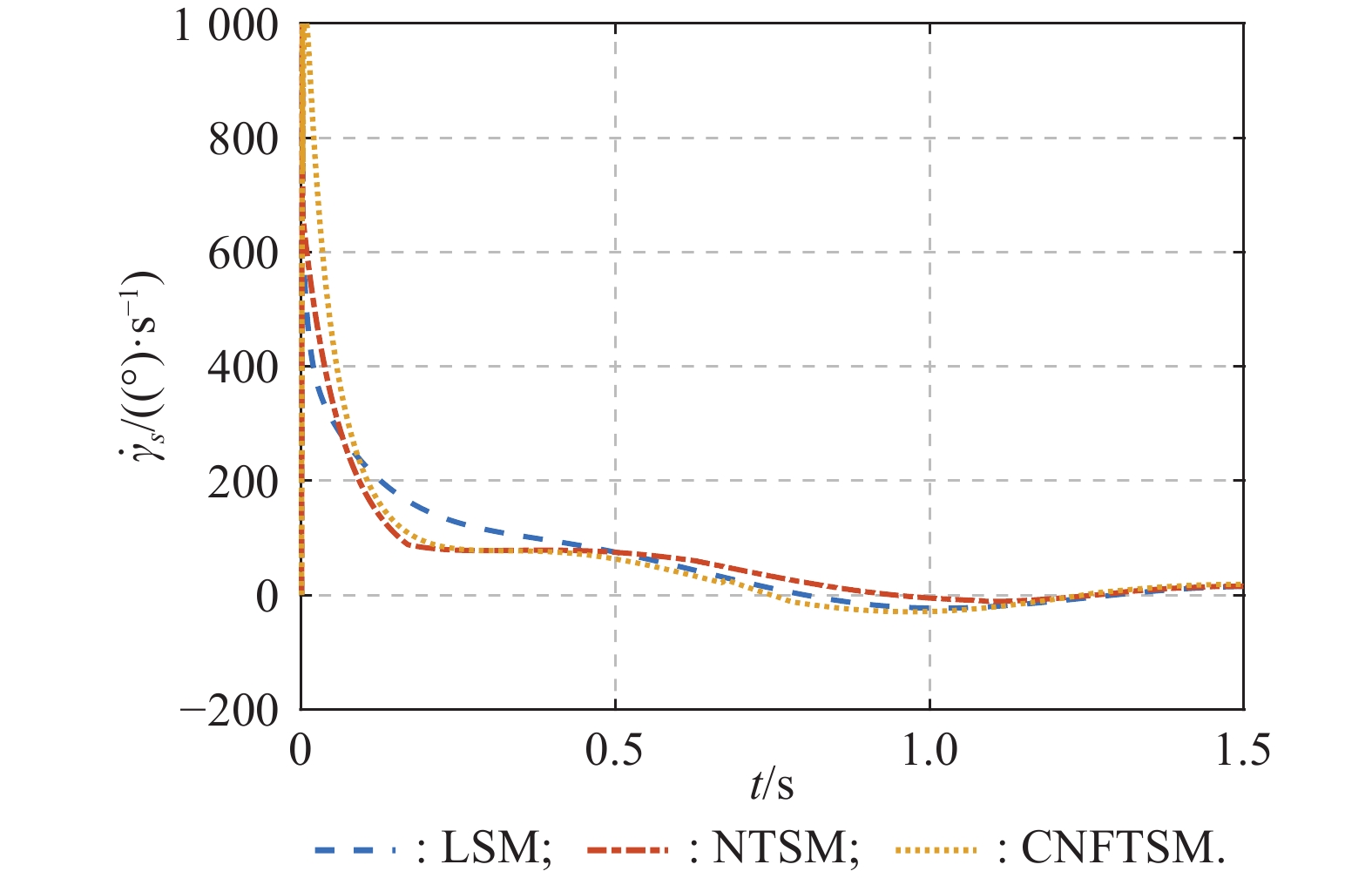
Fig 21
Pitch frame angular velocity (Case 2)"
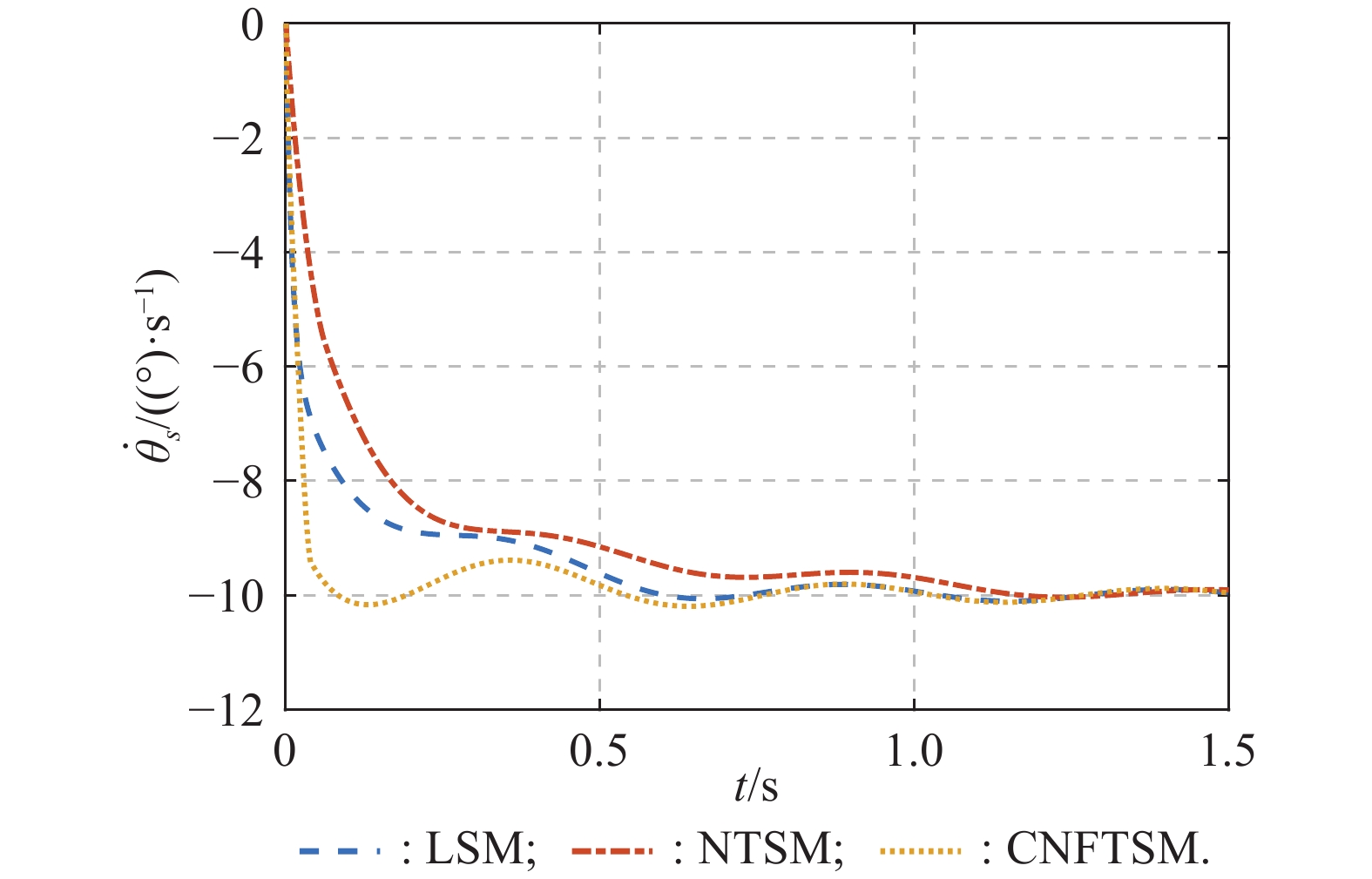
Fig 22
Detector error angle (Case 2)"
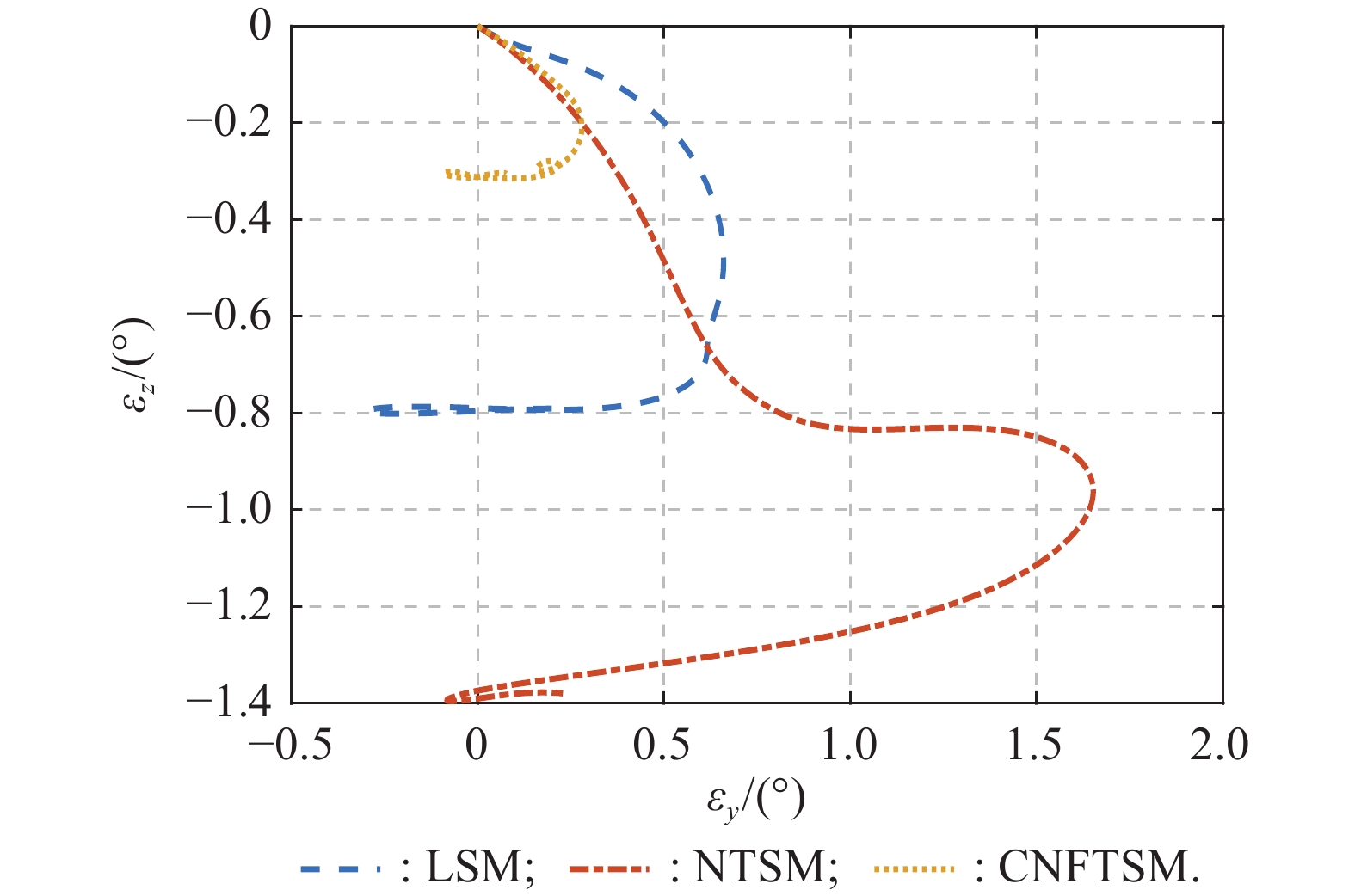
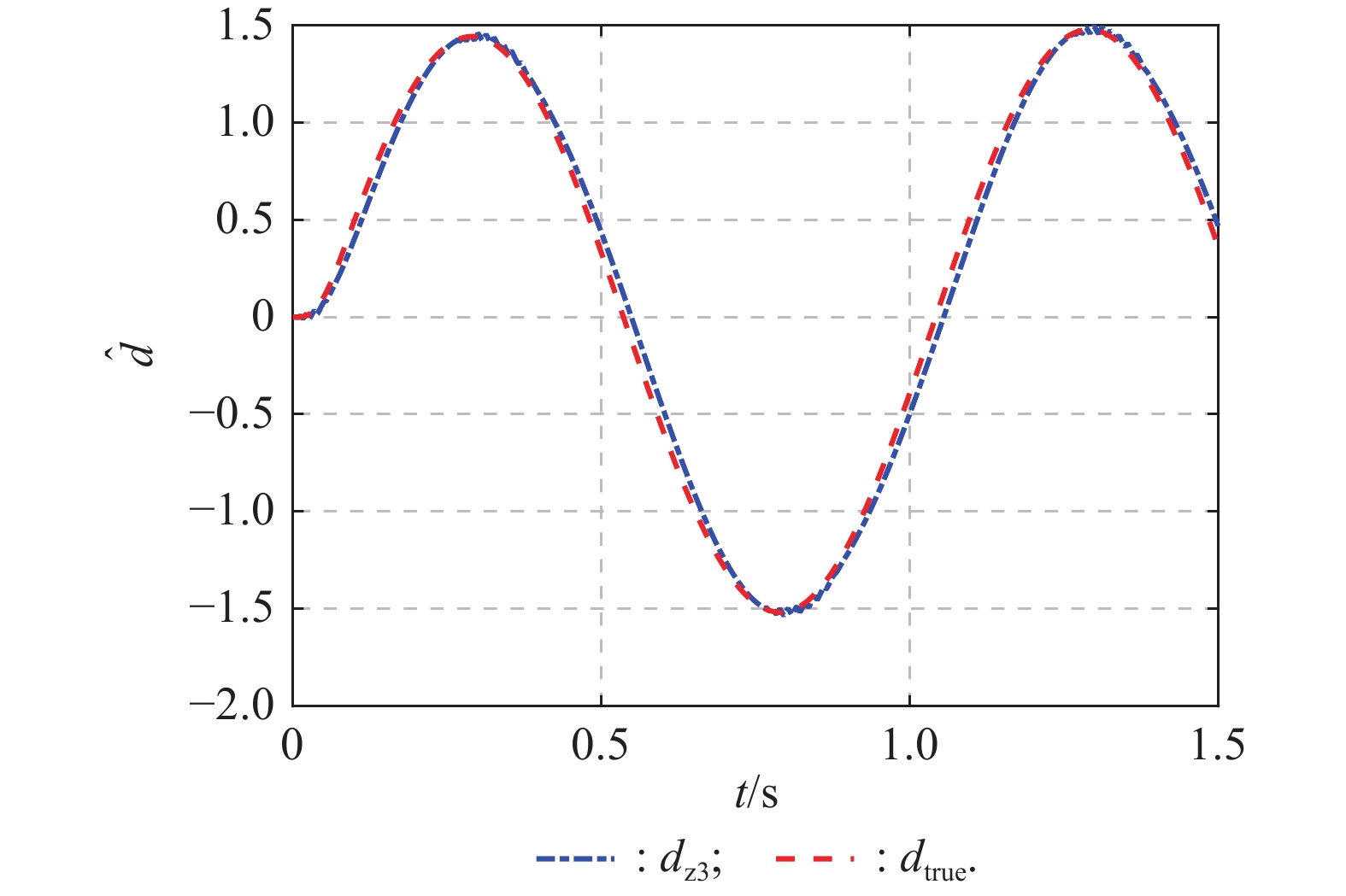
Fig 23
Disturbance estimation"
| 1 |
CHEN J, ZHANG Z C, YI K, et al Snake-hot-eye-assisted multi-process-fusion target tracking based on a roll-pitch semi-strapdown infrared imaging seeker. Journal of Bionic Engineering, 2022, 19, 1124- 1139.
doi: 10.1007/s42235-022-00195-z |
| 2 |
LI Y, HE L, XIA Q L Line-of-sight rates extraction of roll-pitch seeker under anti-infrared decoy state. Journal of Systems Engineering and Electronics, 2021, 32 (1): 178- 196.
doi: 10.23919/JSEE.2021.000016 |
| 3 |
WANG X C, MO B, LI X, et al A line-of-sight rate estimation method for roll-pitch gimballed infrared seeker. Optik, 2019, 192, 162935.
doi: 10.1016/j.ijleo.2019.162935 |
| 4 | WANG X C, MO B, LI X, et al Predictive functional control based zenith-pass controller design for roll-pitch seeker. International Journal of Aerospace Engineering, 2020, 2020, 9709341. |
| 5 | ZHOU J P, LI W, WEN Q Q, et al Stability design of spinning missile autopilot considering parasitical loop of roll-pitch seeker. Acta Armamentarii, 2022, 43 (1): 1- 10. |
| 6 |
LI Y, WEN X H, WEI L, et al Influence of roll-pitch seeker DRR and parasitic loop on Lyapunov stability of guidance system. Journal of Systems Engineering and Electronics, 2021, 32 (6): 1509- 1526.
doi: 10.23919/JSEE.2021.000127 |
| 7 | XIAO B W, LU T Y, MA Z Y, et al. Research on the influence of the disturbance rejection rate of a roll-pitch seeker on stable tracking characteristics. Aerospace. 2023, 10(11): 940. |
| 8 |
LI W, WEN Q Q, YANG Y Stability analysis of spinning missiles induced by seeker disturbance rejection rate parasitical loop. Aerospace Science and Technology, 2019, 90, 194- 208.
doi: 10.1016/j.ast.2019.04.013 |
| 9 | SONG J M, CAI G H, KONG X X, et al Stability region analysis of the parasitic loop of the semi-strapdown homing seeker. Proceedings of the Institution of Mechanical Engineers, Part I Journal of Systems and Control Engineering, 2012, 226, 550- 562. |
| 10 |
LIU X, MO B, LIU F X Line-of-sight stabilization of roll-pitch seeker using differentiator-based disturbance compensation control. Proceedings of the Institution of Mechanical Engineers, Part G Journal of Aerospace Engineering, 2020, 234 (7): 1326- 1339.
doi: 10.1177/0954410020902665 |
| 11 |
DU X, XIA Q L The research of guidance performance of the phased array seeker with platform for air-to-air missile. Optik, 2016, 127 (22): 10322- 10334.
doi: 10.1016/j.ijleo.2016.08.071 |
| 12 |
ZHANG M Y, LIU H, ZHANG H W, et al A hybrid control strategy for the optoelectronic stabilized platform of a seeker. Optik, 2019, 181, 1000- 1012.
doi: 10.1016/j.ijleo.2018.12.168 |
| 13 |
LIN S Y, LIN D F, WANG W A novel online estimation and compensation method for strap down phased array seeker disturbance rejection effect using extended state Kalman filter. IEEE Access, 2019, 7, 172330- 172340.
doi: 10.1109/ACCESS.2019.2956256 |
| 14 | JIN Q Y, LIU F X, WANG X C, et al The control strategy of zenith-pass singularity problem under the roll-pitch seeker oblique scheme. Acta Armamentarii, 2024, 45 (2): 628- 640. |
| 15 |
LIU S X, DU X, XIA Q L An on-line compensation method for the disturbance rejection rate of seekers. Optik, 2018, 157, 1306- 1318.
doi: 10.1016/j.ijleo.2017.12.084 |
| 16 | LI Y, LI W, LIU X D, et al A new compensation method for DRR of a roll-pitch seeker based on ESO. International Journal of Aerospace Engineering, 2021, 2021, 19. |
| 17 |
JIANG H H, JIA H G, WEI Q Analysis of zenith pass problem and tracking strategy design for roll-pitch seeker. Aerospace Science and Technology, 2012, 23, 345- 351.
doi: 10.1016/j.ast.2011.08.011 |
| 18 |
HUSEK P Adaptive sliding mode control with moving sliding surface. Applied Soft Computing, 2016, 42, 178- 183.
doi: 10.1016/j.asoc.2016.01.009 |
| 19 |
DU H B, YU X H, MICHAEL Z Q, et al Chattering-free discrete-time sliding mode control. Automatica, 2016, 68, 87- 91.
doi: 10.1016/j.automatica.2016.01.047 |
| 20 |
DENG Y T, WANG J L, LI H W, et al Adaptive sliding mode current control with sliding mode disturbance observer for PMSM drives. ISA Transactions, 2019, 88, 113- 126.
doi: 10.1016/j.isatra.2018.11.039 |
| 21 |
VO A T, KANG H J An adaptive terminal sliding mode control for robot manipulators with non-singular terminal sliding surface variables. IEEE Access, 2019, 7, 8701- 8712.
doi: 10.1109/ACCESS.2018.2886222 |
| 22 |
FU D X, ZHAO X M, YUAN H Nonsingular terminal sliding mode control based on adaptive time delay estimation for permanent magnet linear synchronous motor. International Journal of Control Automation and Systems, 2022, 20 (1): 24- 34.
doi: 10.1007/s12555-020-0448-z |
| 23 |
LV D M Finite-time sliding mode control with unknown control direction. IEEE Access, 2021, 9, 70896- 70905.
doi: 10.1109/ACCESS.2021.3078768 |
| 24 |
ZOU Q, CHANG S C A new fixed-time terminal sliding mode control for second-order nonlinear systems. Journal of the Franklin Institute, 2024, 361 (3): 1255- 1267.
doi: 10.1016/j.jfranklin.2024.01.001 |
| 25 |
ZHANG L, TAO R, ZHANG Z X, et al PMSM non-singular fast terminal sliding mode control with disturbance compensation. Information Sciences, 2023, 642, 119040.
doi: 10.1016/j.ins.2023.119040 |
| 26 | ZHAI J Y, XU G A novel non-singular terminal sliding mode trajectory tracking control for robotic manipulators. IEEE Trans. on Circuits and Systems II Express Briefs, 2021, 68 (1): 391- 395. |
| 27 |
HAMID G, MAEDEH E, HAMED K Adaptive super-twisting non-singular terminal sliding mode control for tracking of quadrotor with bounded disturbances. Aerospace Science and Technology, 2021, 112, 106616.
doi: 10.1016/j.ast.2021.106616 |
| 28 |
LIU J Q, YANG Y, LI K F, et al Improved model-free continuous super-twisting non-singular fast terminal sliding mode control of IPMSM. IEEE Access, 2023, 11, 85361- 85373.
doi: 10.1109/ACCESS.2023.3303843 |
| 29 |
XU B ZHANG L, JI W Improved non-singular fast terminal sliding mode control with disturbance observer for PMSM Drives. IEEE Trans. on Transportation Electrification, 2021, 7 (4): 2753- 2762.
doi: 10.1109/TTE.2021.3083925 |
| 30 |
ZHENG F Y, FAN T, XU M Y, et al Adaptive fractional order non-singular terminal sliding mode anti-disturbance control for advanced layout carrier-based UAV. Aerospace Science and Technology, 2023, 139, 108367.
doi: 10.1016/j.ast.2023.108367 |
| 31 |
JIANG J J, ZHANG H S, JIN D, et al Disturbance observer based non-singular fast terminal sliding mode control of permanent magnet synchronous motors. Journal of Power Electronics, 2024, 24, 249- 257.
doi: 10.1007/s43236-023-00725-w |
| 32 |
LEI R H, CHEN L Dual power non-singular fast terminal sliding mode fault-tolerant vibration-attenuation control of the flexible space robot subjected to actuator faults. Acta Mechanica, 2024, 235, 1255- 1269.
doi: 10.1007/s00707-023-03796-9 |
| [1] | Shihua ZHANG, Xiaohui QI, Sen YANG. An extended state observer with adjustable bandwidth for measurement noise [J]. Journal of Systems Engineering and Electronics, 2024, 35(1): 233-241. |
| [2] | Hua CHEN, Chao SHEN, Jiahui HUANG, Yuhan CAO. Event-triggered model-free adaptive control for a class of surface vessels with time-delay and external disturbance via state observer [J]. Journal of Systems Engineering and Electronics, 2023, 34(3): 783-797. |
| [3] | Jianping ZHOU, Wei LI, Qunli XIA, Huan JIANG. Robust missile autopilot design based on dynamic surface control [J]. Journal of Systems Engineering and Electronics, 2023, 34(1): 160-171. |
| [4] | Xinjian MA, Shiqian LIU, Huihui CHENG. Civil aircraft fault tolerant attitude tracking based on extended state observers and nonlinear dynamic inversion [J]. Journal of Systems Engineering and Electronics, 2022, 33(1): 180-187. |
| [5] | Yue LI, Xianghua WEN, Wei LI, Lan WEI, Qunli XIA. Influence of roll-pitch seeker DRR and parasitic loop on Lyapunov stability of guidance system [J]. Journal of Systems Engineering and Electronics, 2021, 32(6): 1509-1526. |
| [6] | Yue LI, Lei HE, Qunli XIA. Line-of-sight rates extraction of roll-pitch seeker under anti-infrared decoy state [J]. Journal of Systems Engineering and Electronics, 2021, 32(1): 178-196. |
| [7] | Yiru ZOU, Chunsheng LIU, Ke LU. Extended state observer based smooth switching control for tilt-rotor aircraft [J]. Journal of Systems Engineering and Electronics, 2020, 31(4): 815-825. |
| [8] | Junjie LIU, Mingwei SUN, Zengqiang CHEN, Qinglin SUN. High AOA decoupling control for aircraft based on ADRC [J]. Journal of Systems Engineering and Electronics, 2020, 31(2): 393-402. |
| [9] | Ligang GONG, Qing WANG, Chaoyang DONG. Switching disturbance rejection attitude control of near space vehicles with variable structure [J]. Journal of Systems Engineering and Electronics, 2019, 30(1): 167-179. |
| [10] | Jiayi TIAN, Shifeng ZHANG. Active disturbance rejected predictive functional control for space vehicles with RCS [J]. Journal of Systems Engineering and Electronics, 2018, 29(5): 1022-1035. |
| [11] | Jianguo GUO, Yuchao LIU, Jun ZHOU. Integral terminal sliding mode control for nonlinear systems [J]. Journal of Systems Engineering and Electronics, 2018, 29(3): 571-579. |
| [12] | Yuhang YUN, Shengjing TANG, Jie GUO, Wei SHANG. Robust controller design for compound control missile with fixed bounded convergence time [J]. Journal of Systems Engineering and Electronics, 2018, 29(1): 116-133. |
| [13] | Zhanshan Zhao, Hongru Gu, Jing Zhang, and Gang Ding. Terminal sliding mode control based on super-twisting algorithm [J]. Systems Engineering and Electronics, 2017, 28(1): 145-. |
| [14] | Wei Shang, Shengjing Tang, Jie Guo, Yueyue Ma, and Yuhang Yun. Robust sliding mode control with ESO for dual-control missile [J]. Journal of Systems Engineering and Electronics, 2016, 27(5): 1073-1082. |
| [15] | Chutiphon Pukdeboon. Adaptive backstepping finite-time sliding mode control of spacecraft attitude tracking [J]. Journal of Systems Engineering and Electronics, 2015, 26(4): 826-. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||