
Journal of Systems Engineering and Electronics ›› 2023, Vol. 34 ›› Issue (2): 492-500.doi: 10.23919/JSEE.2023.000039
• CONTROL THEORY AND APPLICATION • Previous Articles
Yajie MA( ), Bin JIANG(), Hao REN()
), Bin JIANG(), Hao REN()
Received:2021-02-25
Online:2023-04-18
Published:2023-04-18
Contact:
Yajie MA
E-mail:yajiema@nuaa.edu.cn;binjiang@nuaa.edu.cn;haoren@nuaa.edu.cn
About author:Supported by:Yajie MA, Bin JIANG, Hao REN. Minimum eigenvalue based adaptive fault compensation for hypersonic vehicles[J]. Journal of Systems Engineering and Electronics, 2023, 34(2): 492-500.
Add to citation manager EndNote|Reference Manager|ProCite|BibTeX|RefWorks

Fig 1
An X-33 vehicle"

Fig 2
Control effectors of an X-33 vehicle"
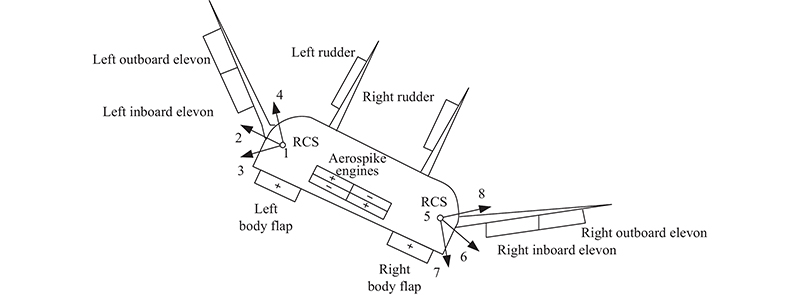
Fig 3
Attitude tracking profiles with sat[ $ {\boldsymbol{e}}_{\boldsymbol{2}} $ ] "
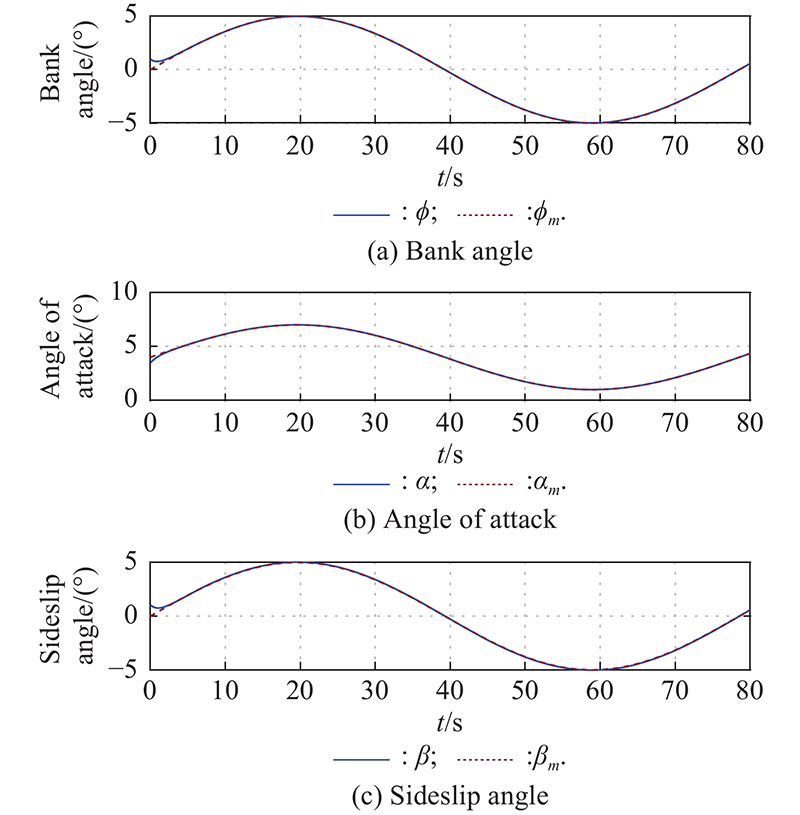
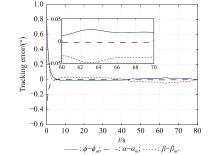
Fig 4
Attitude tracking error with sat[ ${\boldsymbol{e}}_{\boldsymbol{2}}$ ]: ${\boldsymbol{\gamma}}$ ? ${\boldsymbol{\gamma}}_{\boldsymbol{m}}$ "
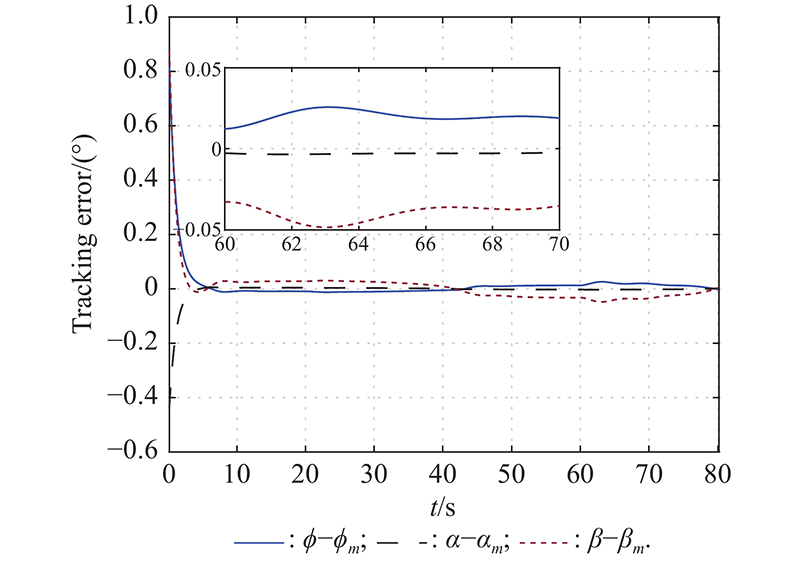
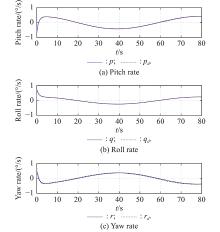
Fig 5
Angular velocity tracking profiles with sat[ ${\boldsymbol{e}}_{\boldsymbol{2}}$ ] "
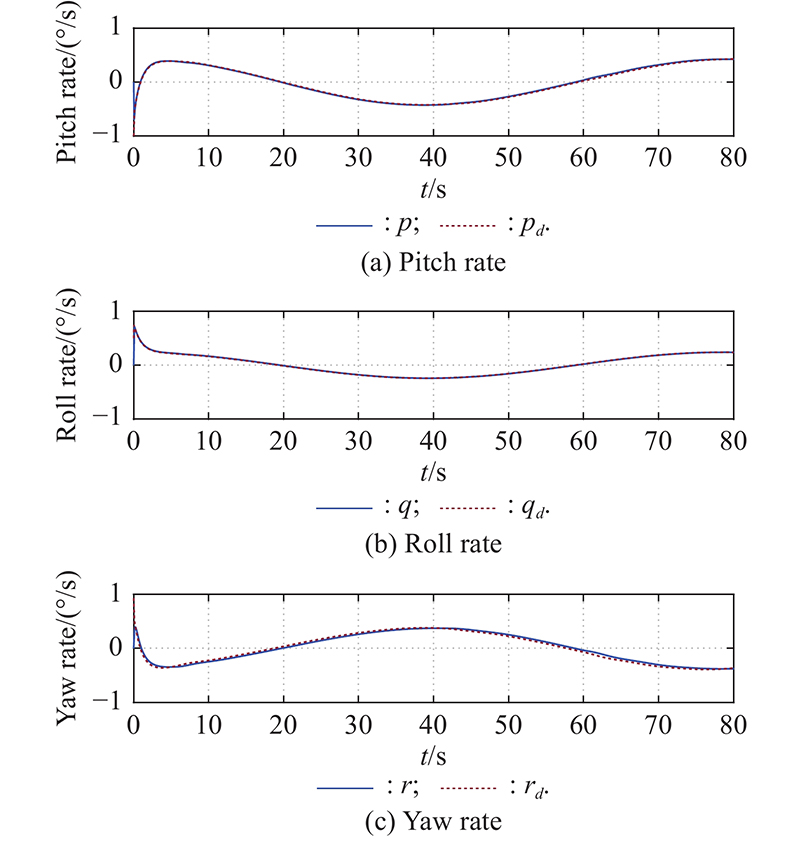
Fig 6
Angular velocity tracking error with sat[ ${\boldsymbol{e}}_{\boldsymbol{2}}$ ]: ${\boldsymbol{\omega}}-{\boldsymbol{\omega}}_{\boldsymbol{d}}$ "
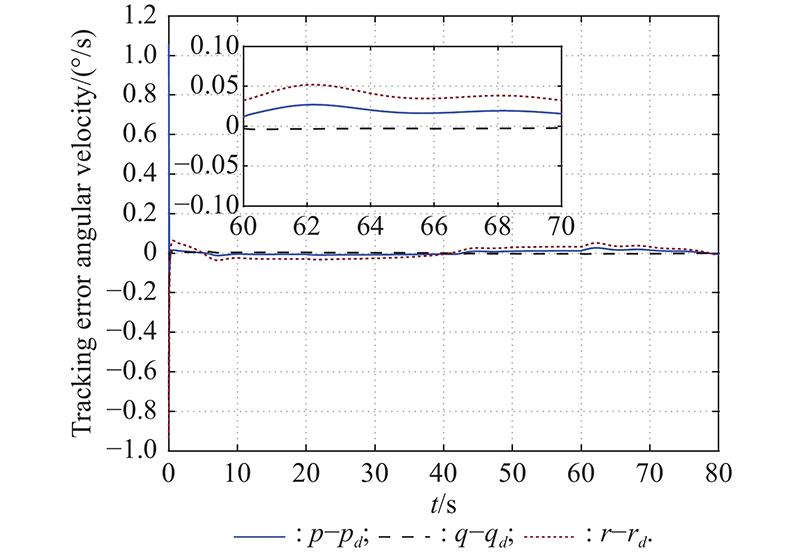
Fig 7
Control input ${\boldsymbol{\delta}}$ with sat[ ${\boldsymbol{e}}_{\boldsymbol{2}}$ ] "
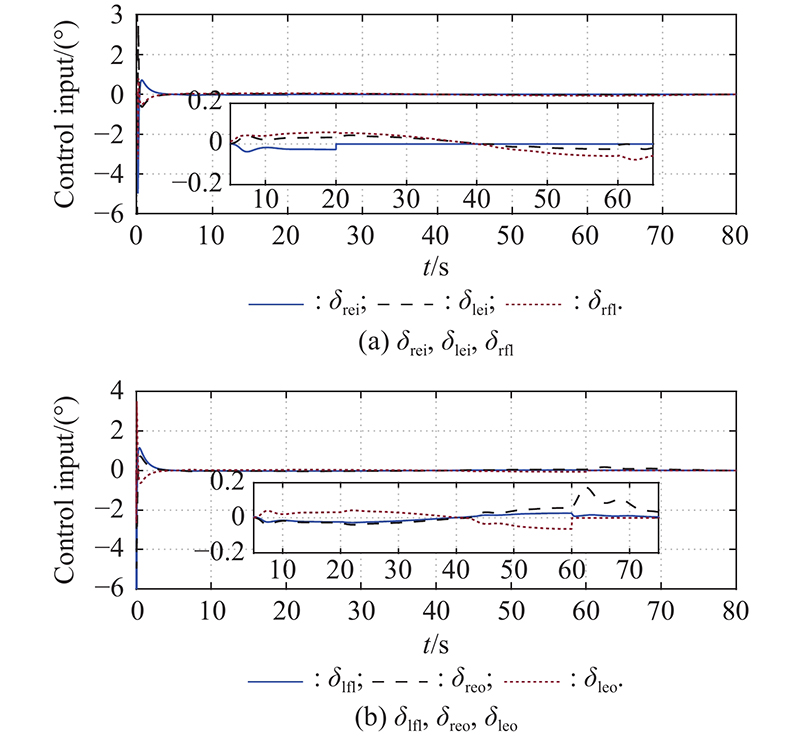
Fig 8
Attitude tracking error with $\dfrac{{\boldsymbol{e}}_2}{\|{\boldsymbol{e}}_2\|}$ : ${\boldsymbol{\gamma }}$ ? ${\boldsymbol{\gamma}}_{\boldsymbol{m}}$ "
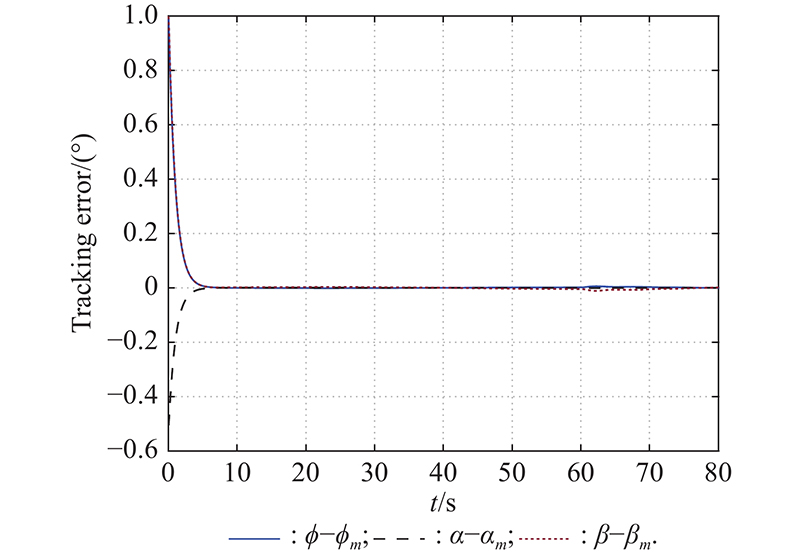
Fig 9
Angular velocity tracking error $\dfrac{{\boldsymbol{e}}_{\boldsymbol{2}}}{\|{\boldsymbol{e}}_{\boldsymbol{2}}\|}$ : ${\boldsymbol{\omega}}-{\boldsymbol{\omega}}_{\boldsymbol{d}}$ "
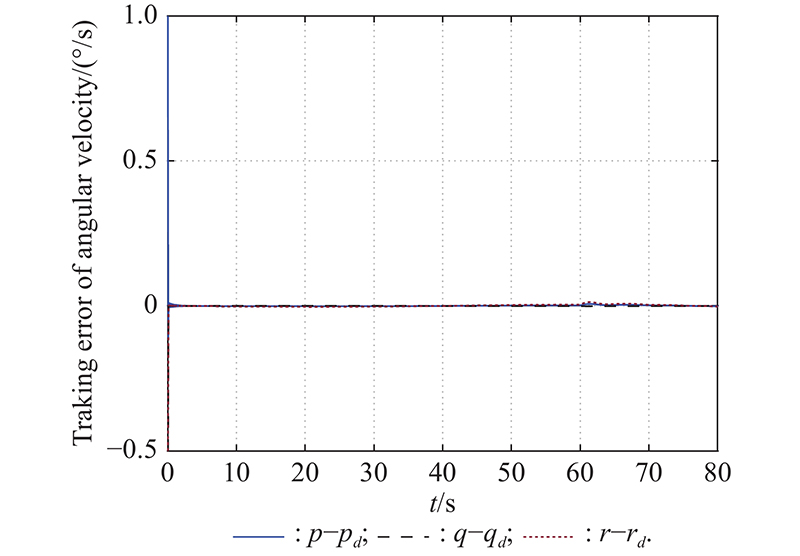
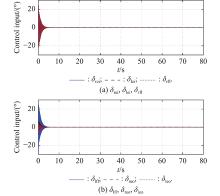
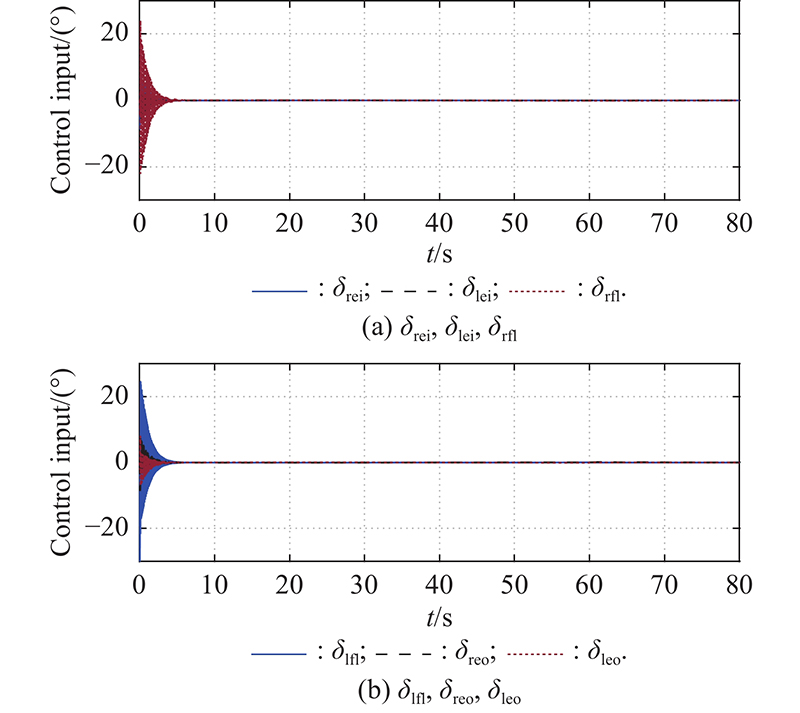
Fig 10
Control input ${\boldsymbol{\delta}}$ with $\dfrac{{\boldsymbol{e}}_{\boldsymbol{2}}}{\|{\boldsymbol{e}}_{\boldsymbol{2}}\|}$ "
| 1 |
XU Y J Nonlinear robust stochastic control for unmanned aerial vehicles. Journal of Guidance, Control, and Dynamics, 2009, 32 (4): 1308- 1319.
doi: 10.2514/1.40753 |
| 2 | WU L G, YANG X B, LI F B Nonfragile output tracking control of hypersonic air-breathing vehicles with an LPV model. IEEE/ASME Trans. on Mechatronics, 2018, 18 (4): 1280- 1228. |
| 3 |
LUO Y, SERRANI A, YURKOVICH S, et al Model-predictive dynamic control allocation scheme for reentry vehicles. Journal of Guidance, Control, and Dynamics, 2007, 30 (1): 100- 113.
doi: 10.2514/1.25473 |
| 4 |
XU B, WANG X, SHI Z K Robust adaptive neural control of nonminimum phase hypersonic vehicle model. IEEE Trans. on Systems, Man, and Cybernetics: Systems, 2021, 51 (2): 1107- 1115.
doi: 10.1109/TSMC.2019.2894916 |
| 5 |
AN H, WU Q Q, WANG G, et al Adaptive compound control of air-breathing hypersonic vehicles. IEEE Trans. on Aerospace and Electronic Systems, 2020, 56 (6): 4519- 4532.
doi: 10.1109/TAES.2020.2999149 |
| 6 |
GUO Z Y, GUO J G, ZHOU J, et al Robust tracking for hypersonic reentry vehicles via disturbance estimation-triggered control. IEEE Trans. on Aerospace and Electronic Systems, 2020, 56 (2): 1279- 1289.
doi: 10.1109/TAES.2019.2928605 |
| 7 | SUN J L, YI J Q, PU Z Q, et al Adaptive fuzzy nonsmooth backstepping output-feedback control for hypersonic vehicles with finite-time convergence. IEEE Trans. on Fuzzy Systems, 2019, 28 (10): 2320- 2334. |
| 8 | HALL C, GALLAHER M, HENDRIX N. X-33 attitude control system design for ascent, transition, and entry flight regimes. Proc. of the Guidance, Navigation, and Control Conference and Exhibit, 1998. https://doi.org/10.2514/6.1998-4411. |
| 9 |
SHTESSEL Y, HALL C, JACKSON M Reusable launch vehicle control in multiple-time-scale sliding modes. Journal of Guidance, Control, and Dynamics, 2000, 23 (6): 1013- 1020.
doi: 10.2514/2.4669 |
| 10 |
DOMAN D B, NGO A D Dynamic inversion-based adaptive reconfigurable control of the X-33 on ascent. Journal of Guidance, Control, and Dynamics, 2002, 25 (2): 275- 284.
doi: 10.2514/2.4879 |
| 11 |
YU X, JIANG J A survey of fault-tolerant controllers based on safety-related issues. Annual Reviews in Control, 2015, 39, 46- 57.
doi: 10.1016/j.arcontrol.2015.03.004 |
| 12 |
GAO Z W, DING S X, CECATI C Real-time fault diagnosis and fault-tolerant control. IEEE Trans. on Industrial Electronics, 2015, 62 (6): 3752- 3756.
doi: 10.1109/TIE.2015.2417511 |
| 13 |
YIN S, LUO H, DING S X Real-time implementation of fault tolerant control systems with performance optimization. IEEE Trans. on Industrial Electronics, 2014, 61 (5): 2402- 2411.
doi: 10.1109/TIE.2013.2273477 |
| 14 |
MA Y J, COCQUEMPOT V, EL NAJJAR M E B, et al Multi-design integration based adaptive actuator failure compensation control for two linked 2WD mobile robots. IEEE/ASME Trans. on Mechatronics, 2017, 22 (5): 2174- 2185.
doi: 10.1109/TMECH.2017.2731523 |
| 15 |
ZHANG X D Sensor bias fault detection and isolation in a class of nonlinear uncertain systems using adaptive estimation. IEEE Trans. on Automatic Control, 2011, 56 (5): 1220- 1226.
doi: 10.1109/TAC.2011.2112471 |
| 16 |
ZOU A M, KUMAR K D Robust attitude coordination control for spacecraft formation flying under actuator failures. Journal of Guidance, Control, and Dynamics, 2012, 35 (4): 1247- 1255.
doi: 10.2514/1.55218 |
| 17 |
BOSKOVIC J D, MEHRA R K A decentralized fault-tolerant control system for accommodation of failures in higher-order flight control actuators. IEEE Trans. on Control Systems Technology, 2010, 18 (5): 1103- 115.
doi: 10.1109/TCST.2009.2033805 |
| 18 |
YE D, YANG G H Adaptive fault-tolerant tracking control against actuator faults with application to flight control. IEEE Trans. on Control Systems Technology, 2006, 14 (6): 1088- 1096.
doi: 10.1109/TCST.2006.883191 |
| 19 |
AN H, LIU J X, WANG C H, et al Approximate back-stepping fault-tolerant control of the flexible air-breathing hypersonic vehicle. IEEE/ASME Trans. on Mechatronics, 2016, 21 (3): 1680- 1691.
doi: 10.1109/TMECH.2015.2507186 |
| 20 |
SUN H B, LI S H, SUN C Y Robust adaptive integral-sliding-mode fault-tolerant control for airbreathing hypersonic vehicles. Proceedings of the Institution of Mechanical Engineers, Part I: Journal of Systems and Control Engineering, 2012, 226 (10): 1344- 1355.
doi: 10.1177/1350650113517375 |
| 21 |
SHEN Q K, JIANG B, COCQUEMPOT V Fuzzy logic system-based adaptive fault tolerant control for near space vehicle attitude dynamics with actuator faults. IEEE Trans. on Fuzzy Systems, 2013, 21 (2): 289- 300.
doi: 10.1109/TFUZZ.2012.2213092 |
| 22 | BURKEN J J, LU P, WU Z, et al Two reconfigurable flight-control design methods: robust servomechanism and control allocation. Journal of Guidance, Control, and Dynamics, 2002, 24 (3): 482- 493. |
| 23 | TAN C, YAO X L, TAO G, et al A multiple-model based adaptive actuator failure compensation scheme for control of near-space vehicles. IFAC Proceedings Volumes, 2012, 45 (20): 594- 599. |
| 24 |
YAO X L, TAO G, JIANG B Adaptive actuator failure compensation for multivariable feedback linearizable systems. International Journal of Robust and Nonlinear Control, 2016, 26 (2): 252- 285.
doi: 10.1002/rnc.3309 |
| 25 | TAO G. Adaptive control design and analysis. New Jersey: John Wiley & Sons, 2003. |
| [1] | Fan WANG, Pengfei FAN, Yonghua FAN, Bin XU, Jie YAN. Robust adaptive control of hypersonic vehicle considering inlet unstart [J]. Journal of Systems Engineering and Electronics, 2022, 33(1): 188-196. |
| [2] | Ziquan YU, Youmin ZHANG, Bin JIANG. PID-type fault-tolerant prescribed performance control of fixed-wing UAV [J]. Journal of Systems Engineering and Electronics, 2021, 32(5): 1053-1061. |
| [3] | Fan LI, Jiajun XIONG, Xuhui LAN, Hongkui BI, Xin CHEN. NSHV trajectory prediction algorithm based on aerodynamic acceleration EMD decomposition [J]. Journal of Systems Engineering and Electronics, 2021, 32(1): 103-117. |
| [4] | Guangbin CAI, Yushan ZHAO, Yang ZHAO, Changhua HU. Consensus of multi-vehicle cooperative attack with stochastic multi-hop time-varying delay and actuator fault [J]. Journal of Systems Engineering and Electronics, 2021, 32(1): 228-242. |
| [5] | Hewei ZHAO, Rui LI. Typical adaptive neural control for hypersonic vehicle based on higher-order filters [J]. Journal of Systems Engineering and Electronics, 2020, 31(5): 1031-1040. |
| [6] | Chaofang Hu, Yue Xin, and Hao Feng. Multi-objective reentry trajectory optimization method via GVD for hypersonic vehicles [J]. Systems Engineering and Electronics, 2017, 28(4): 732-. |
| [7] | Xuzi Wu, Zheng Liu, and Rong Xie. Clutter suppression for hypersonic vehicle-borne radar with frequency diverse array [J]. Journal of Systems Engineering and Electronics, 2017, 28(3): 481-492. |
| [8] | Lu Wang, Qinghua Xing, and Yifan Mao. Reentry trajectory rapid optimization for hypersonic vehicle satisfying waypoint and no-fly zone constraints [J]. Systems Engineering and Electronics, 2015, 26(6): 1277-1290. |
| [9] | Jiang Zhao, Rui Zhou, and Xuelian Jin. Progress in reentry trajectory planning for hypersonic vehicle [J]. Journal of Systems Engineering and Electronics, 2014, 25(4): 627-. |
| [10] | Li Zhou and Shumin Fei. Adaptive dynamic surface control for air-breathing hypersonic vehicle [J]. Journal of Systems Engineering and Electronics, 2013, 24(3): 463-. |
| [11] | Haibin Sun, Shihua Li, and Changyin Sun. Adaptive fault-tolerant controller design for airbreathing hypersonic vehicle with input saturation [J]. Journal of Systems Engineering and Electronics, 2013, 24(3): 488-. |
| [12] | Jie Wang, Qun Zong, Bailing Tian, and Helong Liu. Flight control for a flexible air-breathing hypersonic vehicle based on quasi-continuous high-order sliding mode [J]. Journal of Systems Engineering and Electronics, 2013, 24(2): 288-295. |
| [13] | Yiqing Huang, Changyin Sun, Chengshan Qian, Jingmei Zhang, and Li Wang. Polytopic LPV modeling and gain-scheduled switching control for a flexible air-breathing hypersonic vehicle [J]. Journal of Systems Engineering and Electronics, 2013, 24(1): 118-127. |
| [14] | Xuejing Cai and Fen Wu. Multiobjective fault detection and isolation for flexible air-breathing hypersonic vehicle [J]. Journal of Systems Engineering and Electronics, 2011, 22(1): 52-62. |
| [15] | Qian Bin, Yang Wanlin & Wan Qun. Joint DOA and time delay estimation method for space-time coherent distributed signals based on search [J]. Journal of Systems Engineering and Electronics, 2007, 18(2): 341-346. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||