
Journal of Systems Engineering and Electronics ›› 2024, Vol. 35 ›› Issue (6): 1594-1603.doi: 10.23919/JSEE.2024.000111
• CONTROL THEORY AND APPLICATION • Previous Articles
Guofei LI1( ), Shituo LI1(), Bohao LI2,*(), Yunjie WU3
), Shituo LI1(), Bohao LI2,*(), Yunjie WU3
Received:2023-09-28
Online:2024-12-18
Published:2025-01-14
Contact:
Bohao LI
E-mail:liguofei1@126.com;lishituo1@163.com;libh08@buaa.edu.cn
About author:Supported by:Guofei LI, Shituo LI, Bohao LI, Yunjie WU. Deep reinforcement learning guidance with impact time control[J]. Journal of Systems Engineering and Electronics, 2024, 35(6): 1594-1603.

Fig 1
Geometry of the engagement scenario"
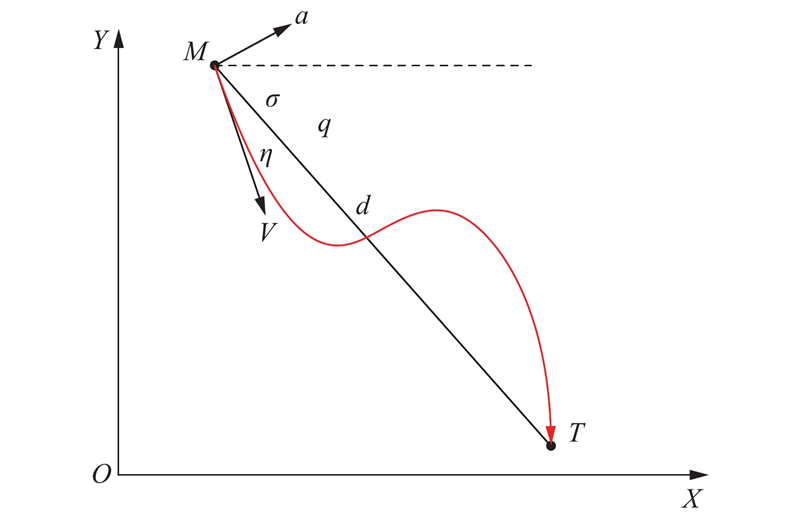
Fig 2
Structure of DDPG algorithm"
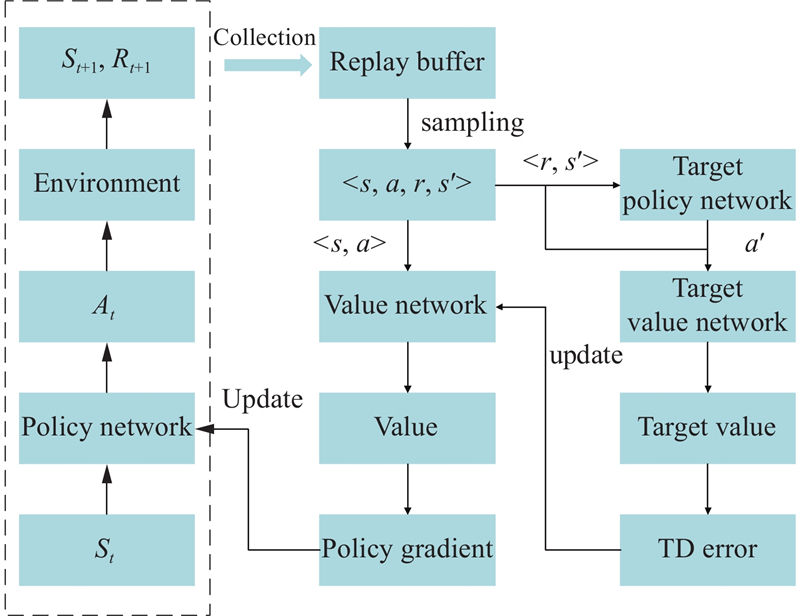
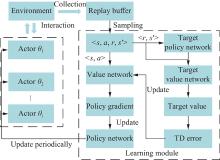
Fig 3
Structure of distributed training process"
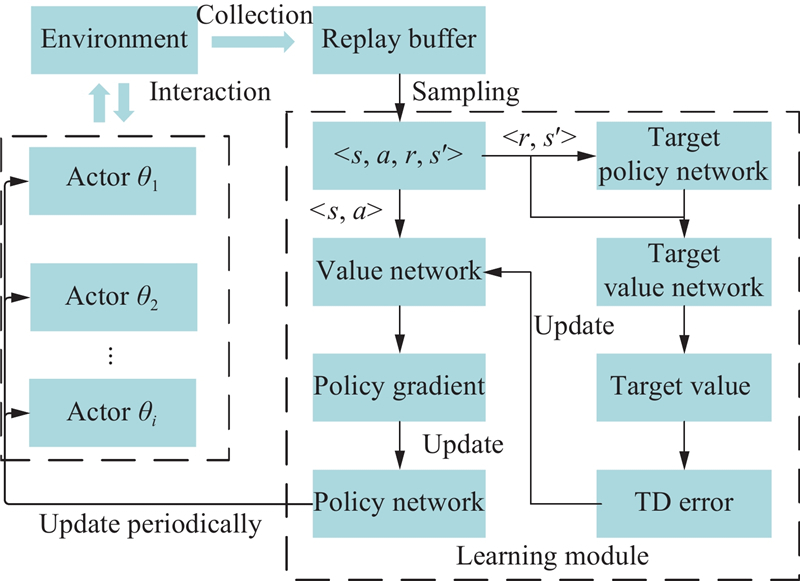

Fig 4
Network structures"
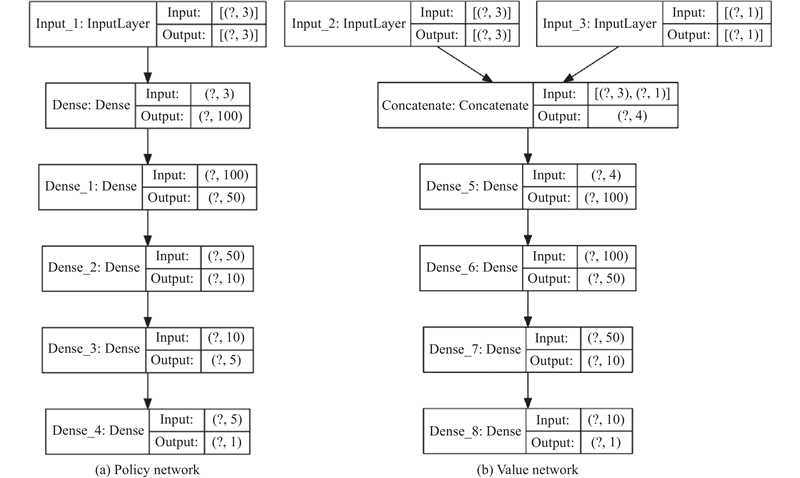
Fig 5
Training process"
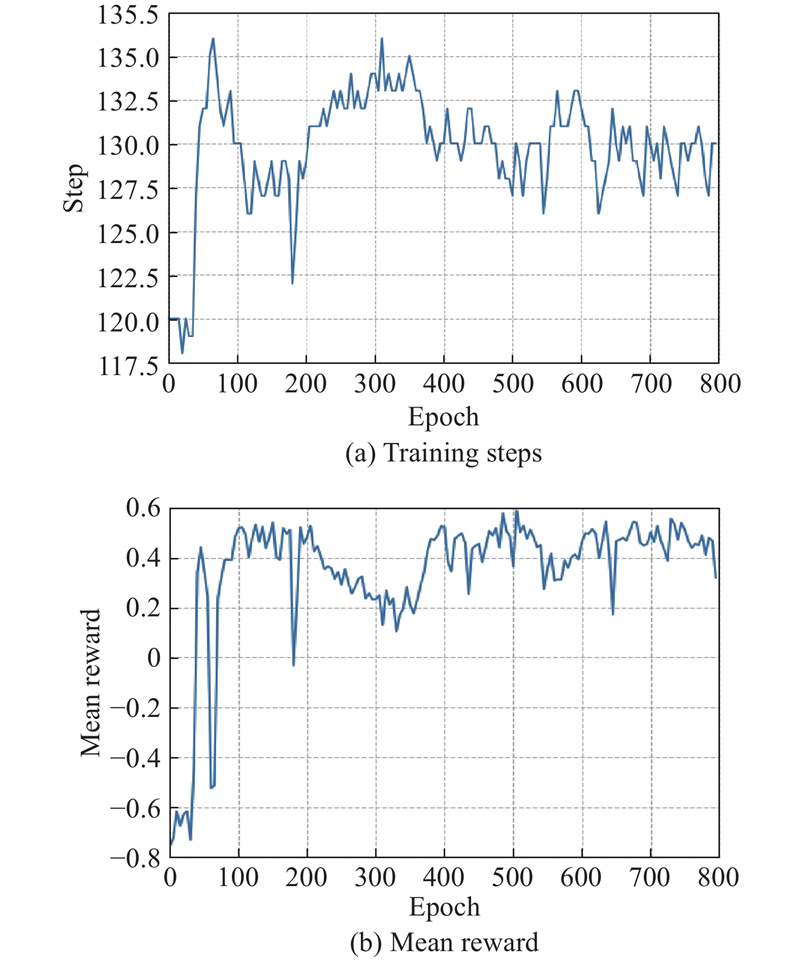

Fig 6
Guidance under different initial positions"

Fig 7
Comparison with traditional guidance"
Fig 8
Impact time under two guidance methods"
| 1 |
YE D, TANG X, SUN Z W, et al Multiple model adaptive intercept strategy of spacecraft for an incomplete-information game. Acta Astronautica, 2021, 180, 340- 349.
doi: 10.1016/j.actaastro.2020.12.015 |
| 2 |
CHEN X T, WANG J Z Sliding-mode guidance for simultaneous control of impact time and angle. Journal of Guidance, Control, and Dynamics, 2019, 42 (2): 394- 401.
doi: 10.2514/1.G003893 |
| 3 |
LI G F, LI Q, WU Y J, et al Leader-following cooperative guidance law with specified impact time. Science China-Technological Sciences, 2020, 63 (11): 2349- 2356.
doi: 10.1007/s11431-020-1669-3 |
| 4 |
XU X G, WEI Z Y, REN Z, et al Time-varying fault-tolerant formation tracking based cooperative control and guidance for multiple cruise missile systems under actuator failures and directed topologies. Journal of Systems Engineering and Electronics, 2019, 30 (3): 587- 600.
doi: 10.21629/JSEE.2019.03.16 |
| 5 |
HU Q L, HAN T, XIN M Sliding-mode impact time guidance law design for various target motions. Journal of Guidance, Control, and Dynamics, 2019, 42 (1): 136- 148.
doi: 10.2514/1.G003620 |
| 6 |
ZHANG Y X, SUN M W, CHEN Z Q Finite-time convergent guidance law with impact angle constraint based on sliding-mode control. Nonlinear Dynamics, 2012, 70 (1): 619- 625.
doi: 10.1007/s11071-012-0482-3 |
| 7 |
JEON I S, LEE J I, TAHK M J Impact-time-control guidance law for anti-ship missiles. IEEE Trans. on Control Systems Technology, 2006, 14 (2): 260- 266.
doi: 10.1109/TCST.2005.863655 |
| 8 | HARRISON G Hybrid guidance law for approach angle and time-of-arrival control. Journal of Guidance, Control, and Dynamics, 2012, 35 (4): 1104- 1114. |
| 9 |
LI G F, WU Y J, XU P Y Fixed-time cooperative guidance law with input delay for simultaneous arrival. International Journal of Control, 2021, 94 (6): 1664- 1673.
doi: 10.1080/00207179.2019.1662947 |
| 10 |
LIU B J, HOU M S, LI Y J Field-of-view and impact angle constrained guidance law for missiles with time-varying velocities. IEEE Access, 2019, 7, 61717- 61727.
doi: 10.1109/ACCESS.2019.2916798 |
| 11 |
KANG Y, CHEN S F, WANG X F, et al Deep convolutional identifier for dynamic modeling and adaptive control of unmanned helicopter. IEEE Trans. on Neural Networks and Learning Systems, 2019, 30 (2): 524- 538.
doi: 10.1109/TNNLS.2018.2844173 |
| 12 |
HU Q L, XIAO B Intelligent proportional-derivative control for flexible spacecraft attitude stabilization with unknown input saturation. Aerospace Science and Technology, 2012, 23 (1): 63- 74.
doi: 10.1016/j.ast.2011.06.003 |
| 13 |
LI G F, WU Y J Nonsingular adaptive-gain super-twisting guidance with an impact angle constraint. Proceedings of the Institution of Mechanical Engineers, Part G: Journal of Aerospace Engineering, 2019, 233, 1705- 1714.
doi: 10.1177/0954410018762236 |
| 14 |
JIANG X Q, LI S, FURFARO R Integrated guidance for Mars entry and powered descent using reinforcement learning and pseudospectral method. Acta Astronautica, 2019, 163, 114- 129.
doi: 10.1016/j.actaastro.2018.12.033 |
| 15 |
JIANG J X, ZENG X Y, GUZZETTI D, et al Path planning for asteroid hopping rovers with pre-trained deep reinforcement learning architectures. Acta Astronautica, 2020, 171, 265- 279.
doi: 10.1016/j.actaastro.2020.03.007 |
| 16 |
SILVER D, SCHRITTWIESER J, SIMONYAN K, et al Mastering the game of Go without human knowledge. Nature, 2017, 550, 354- 359.
doi: 10.1038/nature24270 |
| 17 |
WANG D W, FAN T X, HAN T, et al A two-stage reinforcement learning approach for multi-UAV collision avoidance under imperfect sensing. IEEE Robotics and Automation Letters, 2020, 5 (2): 3098- 3105.
doi: 10.1109/LRA.2020.2974648 |
| 18 |
ZHANG W, SONG K, RONG X W, et al Coarse-to-fine UAV target tracking with deep reinforcement learning. IEEE Trans. on Automation Science and Engineering, 2019, 16 (4): 1522- 1530.
doi: 10.1109/TASE.2018.2877499 |
| 19 |
FURFARO R, SCORSOGLIO A, LINARES R, et al Adaptive generalized ZEM-ZEV feedback guidance for planetary landing via a deep reinforcement learning approach. Acta Astronautica, 2020, 171, 156- 171.
doi: 10.1016/j.actaastro.2020.02.051 |
| 20 |
WANG C, WANG J, SHEN Y, et al Autonomous navigation of UAVs in large-scale complex environments: a deep reinforcement learning approach. IEEE Trans. on Vehicular Technology, 2019, 68 (3): 2124- 2136.
doi: 10.1109/TVT.2018.2890773 |
| 21 |
LI B H, WU Y J Path planning for UAV ground target tracking via deep reinforcement learning. IEEE Access, 2020, 8, 29064- 29074.
doi: 10.1109/ACCESS.2020.2971780 |
| 22 | CHAYSRI P, BLEKAS K, VLACHOS K Multiple mini-robots navigation using a collaborative multiagent reinforcement learning framework. Advanced Robotics: the International Journal of the Robotics Society of Japan, 2020, 34 (13): 902- 916. |
| 23 |
SHALUMOV V Cooperative online guide-launch-guide policy in a target-missile-defender engagement using deep reinforcement learning. Aerospace Science and Technology, 2020, 104, 105996.
doi: 10.1016/j.ast.2020.105996 |
| 24 | CHEN Z Y, WEI W S, CHEN W C Reinforcement learning-based intelligent guidance law for cooperative attack of multiple missiles. Acta Armamentarii, 2021, 42 (8): 1638- 1647. |
| 25 |
GAUDET B, FURFARO R, LINARES R Reinforcement learning for angle-only intercept guidance of maneuvering targets. Aerospace Science and Technology, 2020, 99, 105746.
doi: 10.1016/j.ast.2020.105746 |
| 26 | LI B H, AN X M, YANG X F, et al A distributed reinforcement learning guidance method under impact angle constraints. Journal of Astronautics, 2022, 43 (8): 1061- 1069. |
| 27 |
GAUDET B, LINARES R, FURFARO R Adaptive guidance and integrated navigation with reinforcement meta-learning. Acta Astronautica, 2020, 169, 180- 190.
doi: 10.1016/j.actaastro.2020.01.007 |
| 28 | HONG D, KIM M, PARK S Study on reinforcement learning-based missile guidance law. Applied Sciences-Basel, 2020, 10 (18): 6567. |
| 29 |
LI G F, LV J H, ZHU G L, et al Distributed observer-based cooperative guidance with appointed impact time and collision avoidance. Journal of the Franklin Institute, 2021, 358 (14): 6976- 6993.
doi: 10.1016/j.jfranklin.2021.06.030 |
| 30 |
LI G F, ZUO Z Y Robust leader-follower cooperative guidance under false-data injection attacks. IEEE Trans. on Aerospace and Electronic Systems, 2023, 59 (4): 4511- 4524.
doi: 10.1109/TAES.2023.3242637 |
| 31 | ZHOU J P, ZHANG W J, ZHOU H, et al Design of integral sliding mode guidance law based on disturbance observer. Journal of Systems Engineering and Electronics, 2024, 35 (1): 186- 194. |
| 32 | LI G F, LI B H, WU Y J, et al Cooperative guidance law with impact time control for clusters of flight vehicles. Journal of Astronautics, 2023, 44 (1): 110- 118. |
| 33 |
LI G F, WU Y J Adaptive cooperative guidance with seeker-less followers: a position coordination-based framework. ISA Transactions, 2023, 143, 168- 176.
doi: 10.1016/j.isatra.2023.09.024 |
| 34 |
SILVER D, HUANG A, MADDISON C, et al Mastering the game of Go with deep neural networks and tree search. Nature, 2016, 529, 484- 489.
doi: 10.1038/nature16961 |
| [1] | Nanxun DUO, Qinzhao WANG, Qiang LYU, Wei WANG. Tactical reward shaping for large-scale combat by multi-agent reinforcement learning [J]. Journal of Systems Engineering and Electronics, 2024, 35(6): 1516-1529. |
| [2] | Jiahui ZHANG, Qiuqiu WEN. Closed-form guidance law for velocity maximization with impact angle constraint [J]. Journal of Systems Engineering and Electronics, 2024, 35(5): 1295-1303. |
| [3] | Yuanhe LIU, Nianhao XIE, Kebo LI, Yan’gang LIANG. Missile guidance law design based on free-time convergent error dynamics [J]. Journal of Systems Engineering and Electronics, 2024, 35(5): 1315-1325. |
| [4] | Guang ZHAN, Kun ZHANG, Ke LI, Haiyin PIAO. UAV maneuvering decision-making algorithm based on deep reinforcement learning under the guidance of expert experience [J]. Journal of Systems Engineering and Electronics, 2024, 35(3): 644-665. |
| [5] | Yaozhong ZHANG, Zhuoran WU, Zhenkai XIONG, Long CHEN. A UAV collaborative defense scheme driven by DDPG algorithm [J]. Journal of Systems Engineering and Electronics, 2023, 34(5): 1211-1224. |
| [6] | Jiawei XIA, Xufang ZHU, Zhong LIU, Qingtao XIA. LSTM-DPPO based deep reinforcement learning controller for path following optimization of unmanned surface vehicle [J]. Journal of Systems Engineering and Electronics, 2023, 34(5): 1343-1358. |
| [7] | Yaozhong ZHANG, Yike LI, Zhuoran WU, Jialin XU. Deep reinforcement learning for UAV swarm rendezvous behavior [J]. Journal of Systems Engineering and Electronics, 2023, 34(2): 360-373. |
| [8] | Bohao LI, Yunjie WU, Guofei LI. Hierarchical reinforcement learning guidance with threat avoidance [J]. Journal of Systems Engineering and Electronics, 2022, 33(5): 1173-1185. |
| [9] | Ang GAO, Qisheng GUO, Zhiming DONG, Zaijiang TANG, Ziwei ZHANG, Qiqi FENG. Research on virtual entity decision model for LVC tactical confrontation of army units [J]. Journal of Systems Engineering and Electronics, 2022, 33(5): 1249-1267. |
| [10] | Shengnan FU, Guanqun ZHOU, Qunli XIA. A trajectory shaping guidance law with field-of-view angle constraint and terminal limits [J]. Journal of Systems Engineering and Electronics, 2022, 33(2): 426-437. |
| [11] | Jia HUANG, Sijiang CHANG, Shengfu CHEN. A hybrid proportional navigation based two-stage impact time control guidance law [J]. Journal of Systems Engineering and Electronics, 2022, 33(2): 461-473. |
| [12] | Kaifang WAN, Bo LI, Xiaoguang GAO, Zijian HU, Zhipeng YANG. A learning-based flexible autonomous motion control method for UAV in dynamic unknown environments [J]. Journal of Systems Engineering and Electronics, 2021, 32(6): 1490-1508. |
| [13] | Wei LI, Qiuqiu WEN, Lei HE, Qunli XIA. Three-dimensional impact angle constrained distributed cooperative guidance law for anti-ship missiles [J]. Journal of Systems Engineering and Electronics, 2021, 32(2): 447-459. |
| [14] | Biao YANG, Wuxing JING, Changsheng GAO. Three-dimensional cooperative guidance law for multiple missiles with impact angle constraint [J]. Journal of Systems Engineering and Electronics, 2020, 31(6): 1286-1296. |
| [15] | Yue LI, Xiaohui QIU, Xiaodong LIU, Qunli XIA. Deep reinforcement learning and its application in autonomous fitting optimization for attack areas of UCAVs [J]. Journal of Systems Engineering and Electronics, 2020, 31(4): 734-742. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||