
Journal of Systems Engineering and Electronics ›› 2024, Vol. 35 ›› Issue (6): 1574-1582.doi: 10.23919/JSEE.2024.000127
• CONTROL THEORY AND APPLICATION • Previous Articles
Chenxu KE( ), Kaiyuan CAI(), Quan QUAN()
), Kaiyuan CAI(), Quan QUAN()
Received:2023-08-11
Accepted:2023-12-13
Online:2024-12-18
Published:2025-01-14
Contact:
Quan QUAN
E-mail:kechenxu@buaa.edu.cn;kycai@buaa.edu.cn;qq_buaa@buaa.edu.cn
About author:Supported by:Chenxu KE, Kaiyuan CAI, Quan QUAN. Analysis of a uniform passive fault-tolerant control method for multicopters[J]. Journal of Systems Engineering and Electronics, 2024, 35(6): 1574-1582.
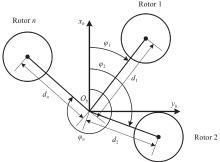
Fig 1
Airframe configuration parameters of a multicopter"
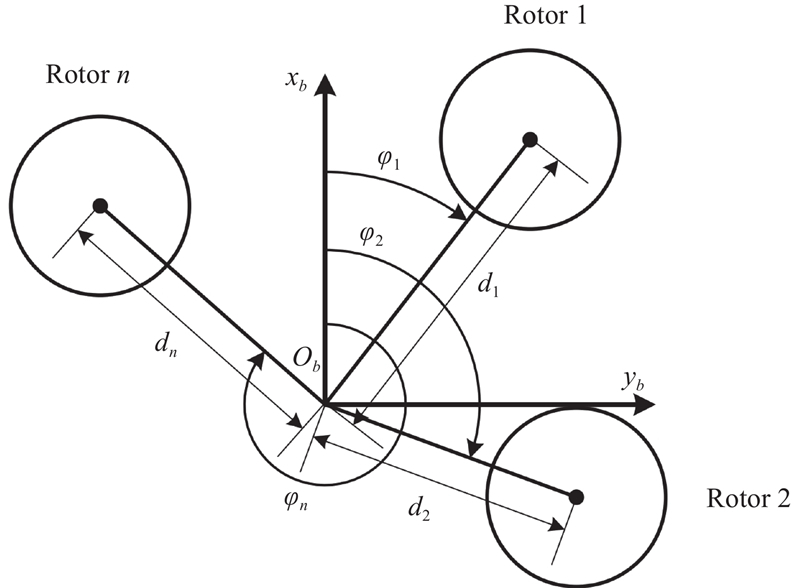
Table 1
Controller parameters"
| Parameter | Value | Parameter | Value | |
| 0.1 | 1.3 | |||
| 20 | 20 | |||
| 1 | 0.01 | |||
| 0.06 |
Table 2
Hexacopter parameters"
| Parameter | Value |
| 3.0 | |
| 0.02 | |
| 23.5 | |
| 0.366 | |
| | |
Table 3
Octocopter parameters"
| Parameter | Value |
| 4.0 | |
| 0.02 | |
| 23.5 | |
| 0.45 | |

Fig 2
Hexacopter and octocopter rotor configuration"
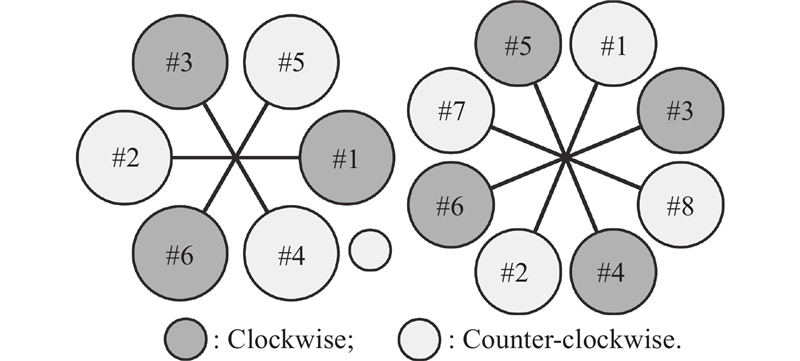

Fig 3
Comparison between actual lumped disturbance and estimated lumped disturbance"
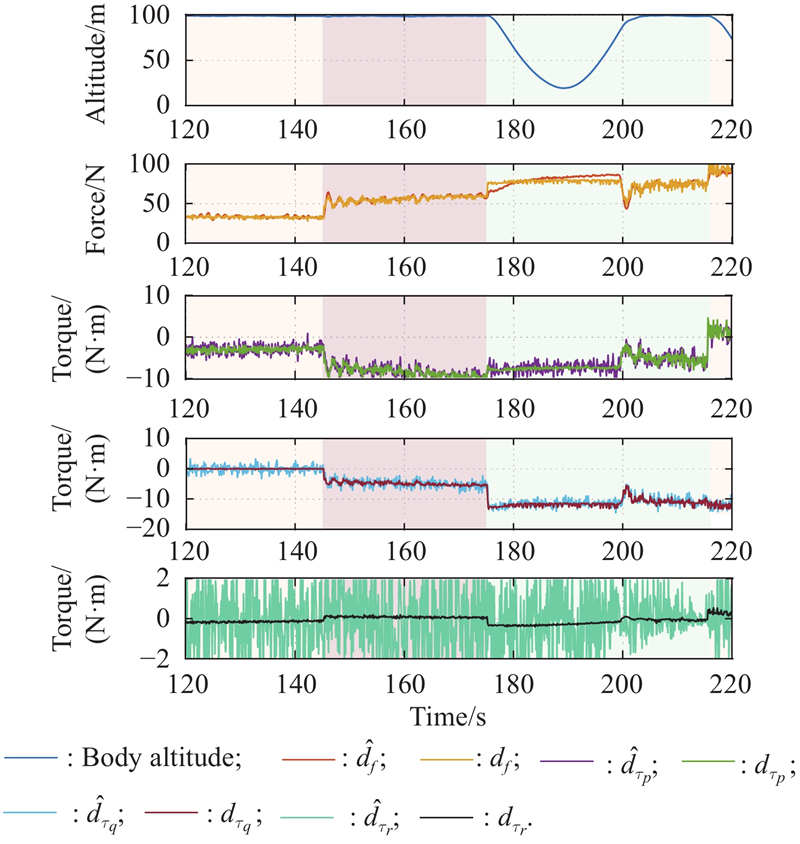
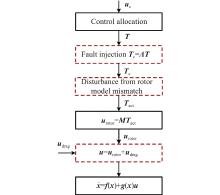
Fig 4
Data flow from the control allocation to the multicopter model"
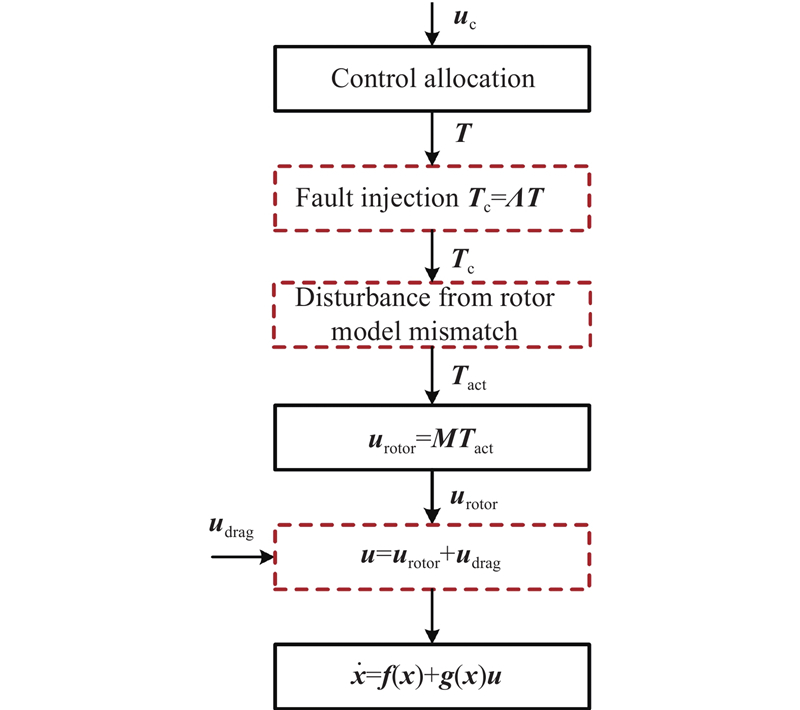

Fig 5
Hovering flight with ${{\boldsymbol{c}}_{{\bf{m}},{\boldsymbol{r}}}} {\boldsymbol{=}} {\boldsymbol{0.000}}\;{\boldsymbol{1}}$"
Fig 6
Hovering flight with ${{\boldsymbol{c}}_{{\bf{m}},{\boldsymbol{r}}}} {\boldsymbol{=}} {\boldsymbol{0.000}}\;{\boldsymbol{2}}$"
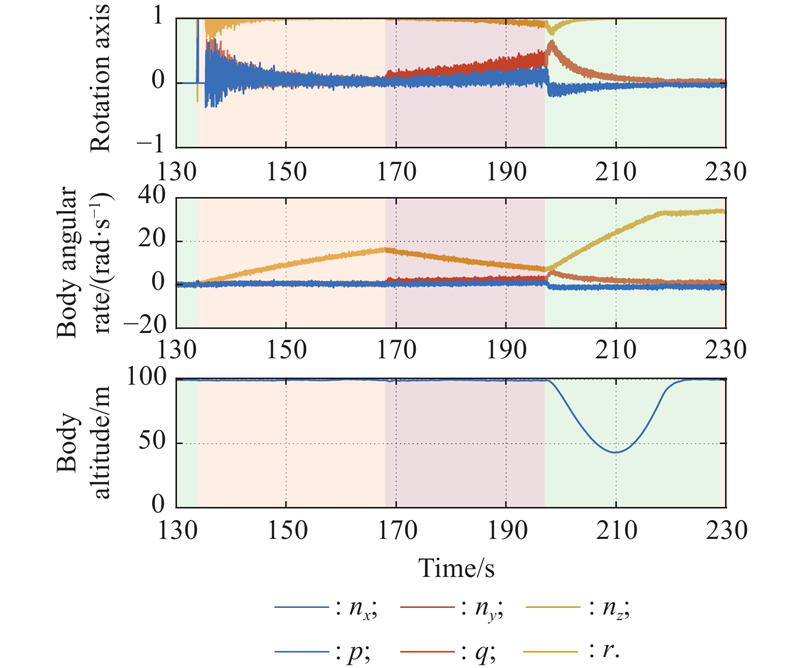
Fig 7
Hovering flight with ${{\boldsymbol{c}}_{{\bf{m}},{\boldsymbol{r}}}} {\boldsymbol{=}} {\boldsymbol{0.000}}\;{\boldsymbol{4}}$"
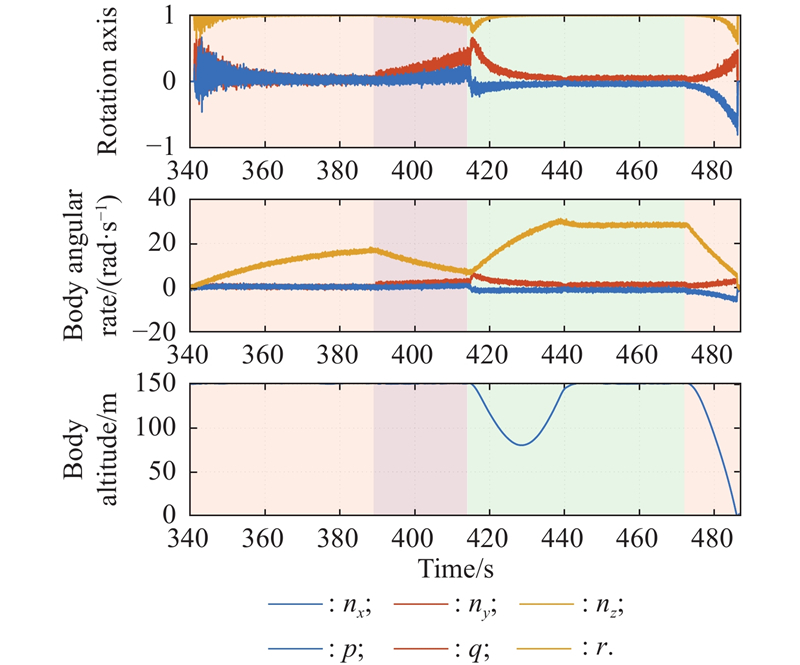

Fig 8
"
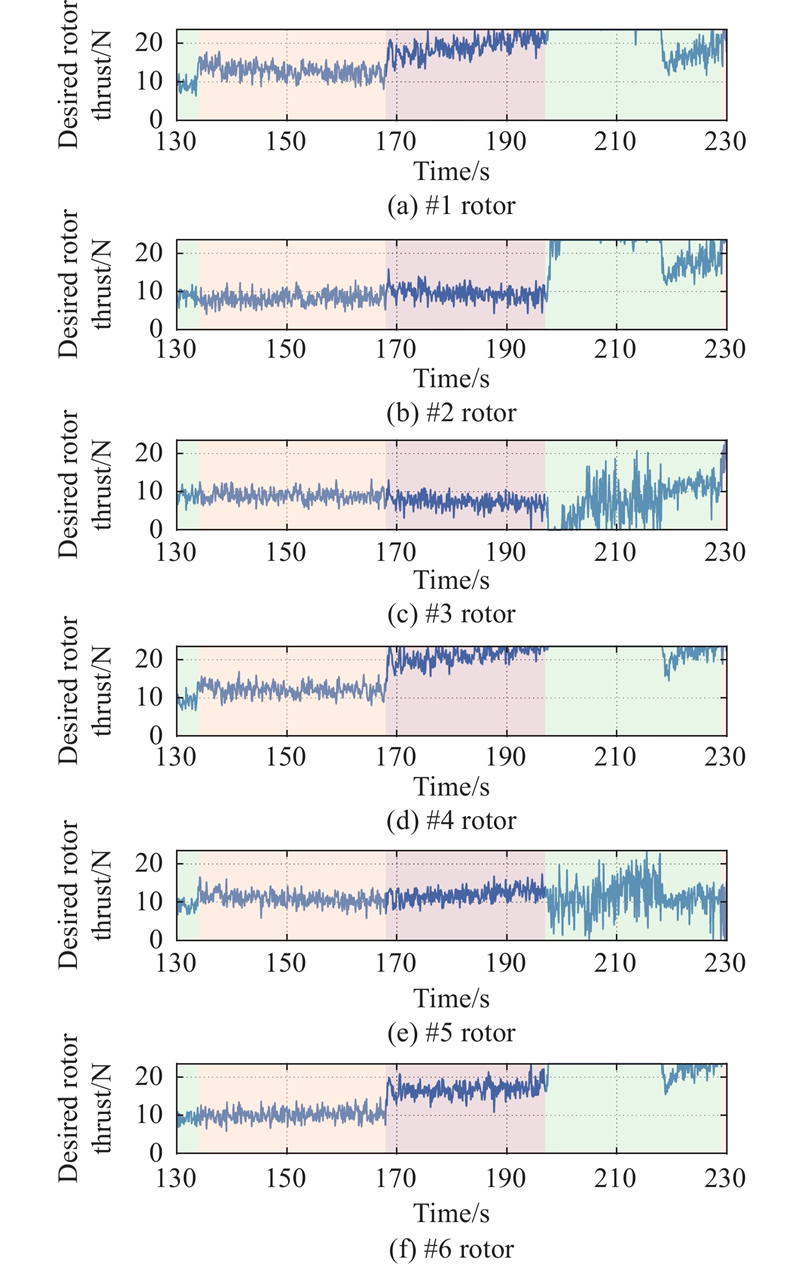

Fig 9
Attitude flight with ${{\boldsymbol{n}}_{{\boldsymbol{3}},{\boldsymbol{x}},{\boldsymbol{d}}}} {\boldsymbol{= 0.78}}$, ${{\boldsymbol{n}}_{{\boldsymbol{3}},{\boldsymbol{y}},{\boldsymbol{d}}}} = {\boldsymbol{0}}$"
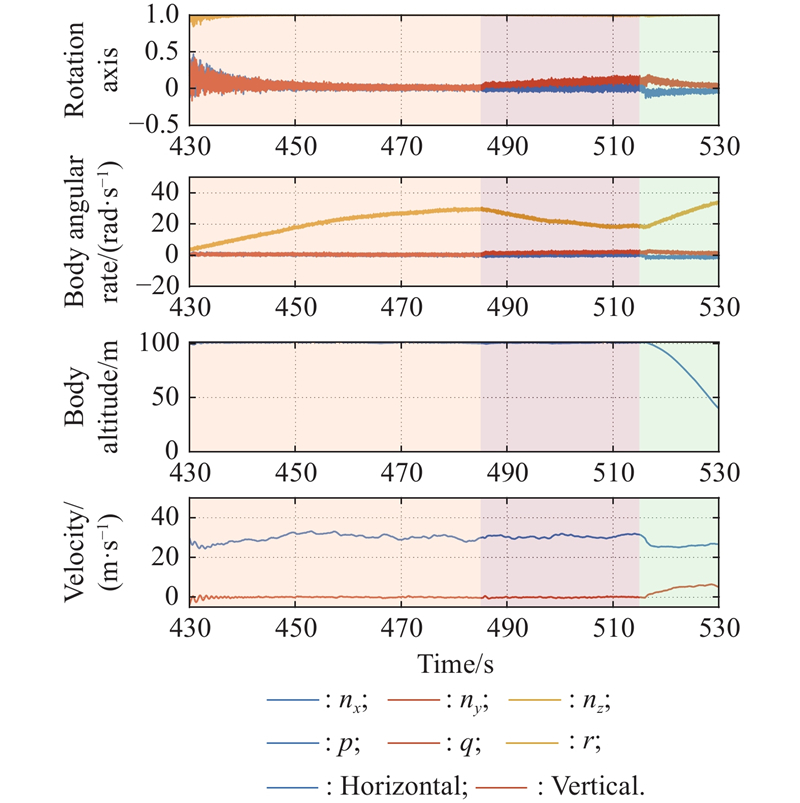

Fig 10
Attitude flight with ${{\boldsymbol{n}}_{{\boldsymbol{3}},{\boldsymbol{x}},{\boldsymbol{d}}}} {\boldsymbol{= 0.53}}$, ${{\boldsymbol{n}}_{{\boldsymbol{3}},{\boldsymbol{y}},{\boldsymbol{d}}}} {\boldsymbol{= 0}}$"
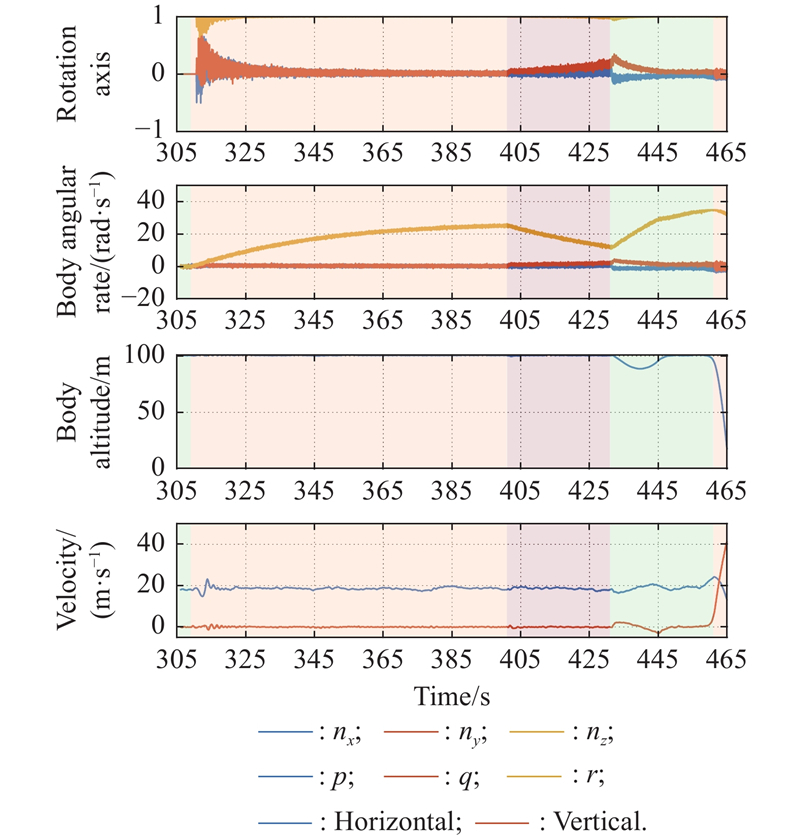

Fig 11
Attitude flight with ${{\boldsymbol{n}}_{{\boldsymbol{3}},{\boldsymbol{x}},{\boldsymbol{d}}}} {\boldsymbol{= 0.38}}$, ${{\boldsymbol{n}}_{{\boldsymbol{3}},{\boldsymbol{y}},{\boldsymbol{d}}}} {\boldsymbol{= 0}}$"
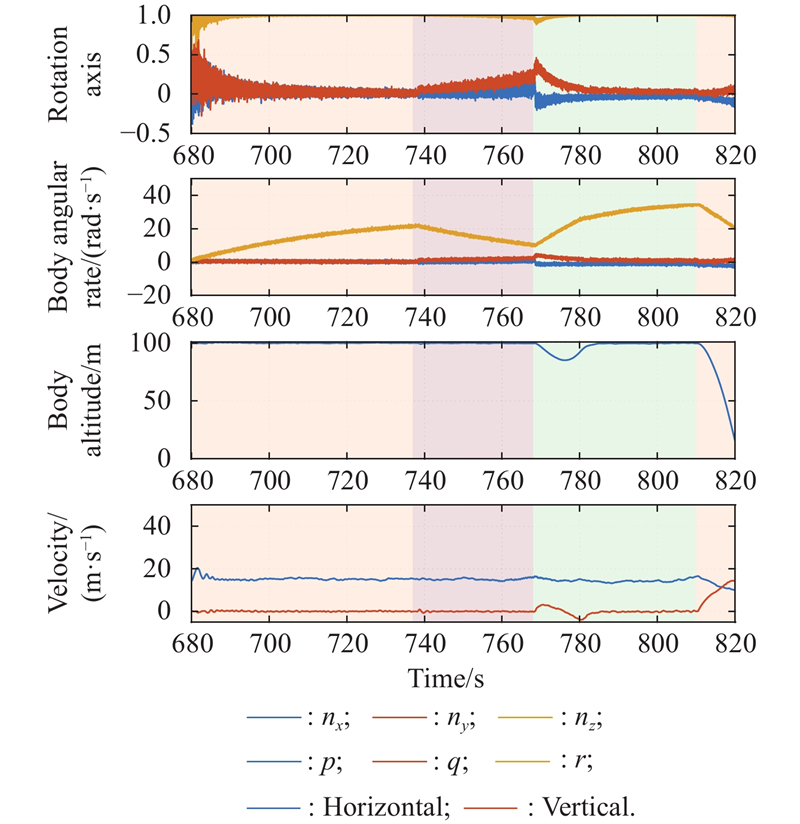

Fig 12
Octocopter hovering flight"
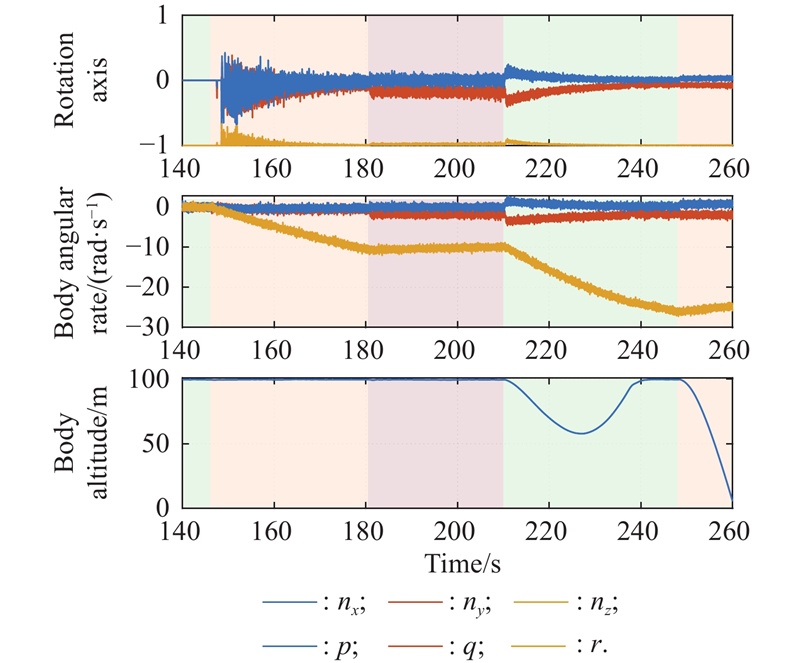

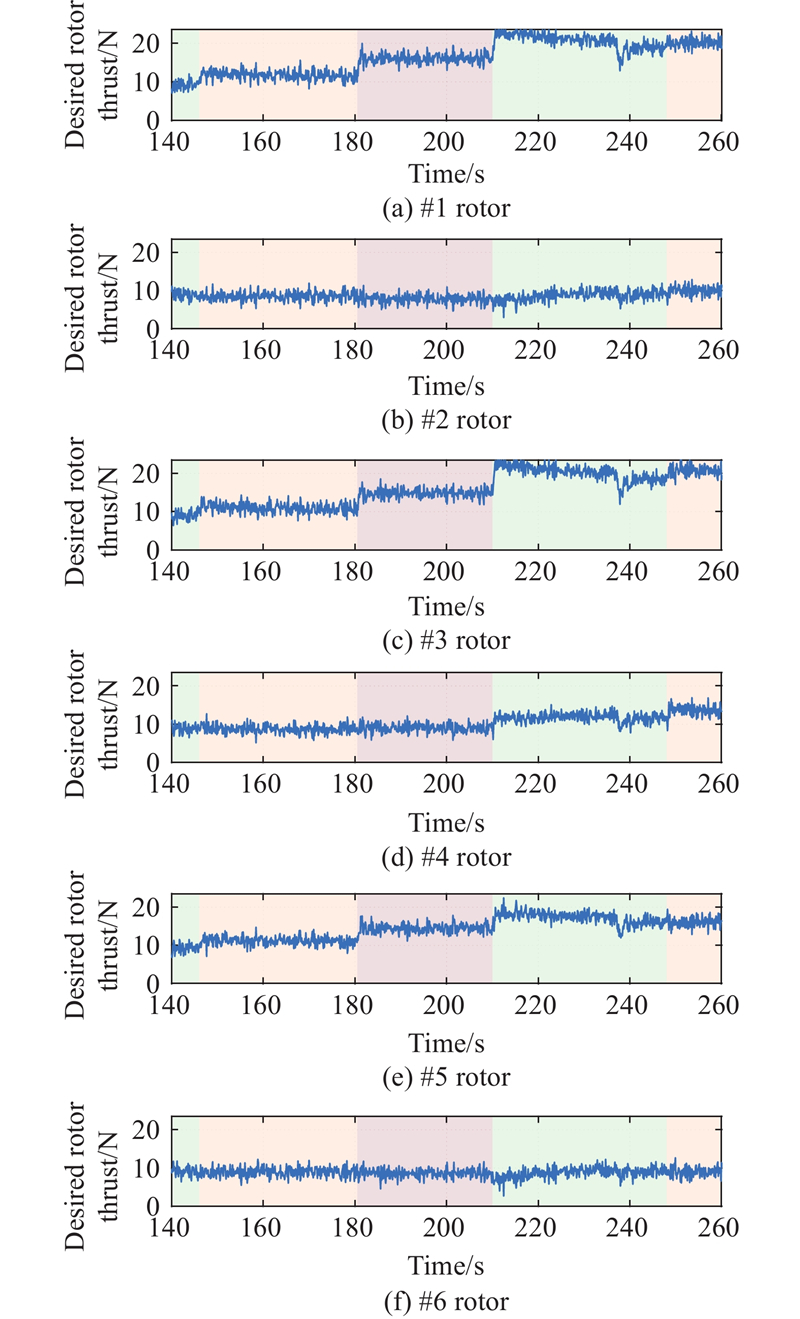
Fig 13
Desired rotor thrust of octocopter hovering flight"
| 1 |
HU L, YI G X, NAN Y, et al Combat situation suppression of multiple UAVs based on spatiotemporal cooperative path planning. Journal of Systems Engineering and Electronics, 2023, 34 (5): 1191- 1210.
doi: 10.23919/JSEE.2023.000119 |
| 2 |
WANG J H, RICARDO A R, XU Y Nonlinear direct data-driven control for UAV formation flight system. Journal of Systems Engineering and Electronics, 2023, 34 (6): 1409- 1418.
doi: 10.23919/JSEE.2023.000140 |
| 3 |
ZHANG Y Z, LI Y K, WU Z R Deep reinforcement learning for UAV swarm rendezvous behavior. Journal of Systems Engineering and Electronics, 2023, 34 (2): 360- 373.
doi: 10.23919/JSEE.2023.000056 |
| 4 | LUO J, LIANG Q C, LI H UAV penetration mission path planning based on improved holonic particle swarm optimization. Journal of Systems Engineering and Electronics, 2023, 34 (1): 197- 213. |
| 5 |
YE Z Y, JIANG B, CHENG Y H, et al Distributed fault diagnosis observer for multi-agent system against actuator and sensor faults. Journal of Systems Engineering and Electronics, 2023, 34 (3): 766- 774.
doi: 10.23919/JSEE.2023.000047 |
| 6 | YU X, ZHOU X B, GUO K X, et al. Safety flight control for a quadrotor UAV using differential flatness and dual-loop observers. IEEE Trans. on Industrial Electronics, 2022, 69(12): 13326−13336. |
| 7 | KE C X, CAI K Y, QUAN Q. Uniform fault-tolerant control of a quadcopter with rotor failure. IEEE/ASME Trans. on Mechatronics, 2023, 28(1): 507−517. |
| 8 | LU P, VAN KAMPEN E J. Active fault-tolerant control for quadrotors subjected to a complete rotor failure. Proc. of the IEEE/RSJ International Conference on Intelligent Robots and Systems, 2015: 4698−4703. |
| 9 | MUELLER M W, D’ANDREA R. Relaxed hover solutions for multicopters: application to algorithmic redundancy and novel vehicles. The International Journal of Robotics Research, 2016, 35(8): 873−889. |
| 10 | SUN S H, SIJBERS L, WANG X R, et al. High-speed flight of quadrotor despite loss of single rotor. IEEE Robotics and Automation Letters, 2018, 3(4): 3201−3207. |
| 11 | ZHENG F Y, ZHEN Z Y, GONG H J. Observer-based backstepping longitudinal control for carrier-based UAV with actuator faults. Journal of Systems Engineering and Electronics, 2010, 28(2): 322−337. |
| 12 | MA X J, LIU S Q, CHEN H H. Civil aircraft fault tolerant attitude tracking based on extended state observers and nonlinear dynamic inversion. Journal of Systems Engineering and Electronics, 2022, 33(1): 180−187. |
| 13 | BASAK H, KEMER E, PREMPAIN E. A passive fault-tolerant switched control approach for linear multivariable systems: application to a quadcopter unmanned aerial vehicle model. Journal of Dynamic Systems, Measurement, and Control, 2019, 142(3): 031004. |
| 14 | MERHEB A R, NOURA H, BATEMAN F. Design of passive fault-tolerant controllers of a quadrotor based on sliding mode theory. International Journal of Applied Mathematics and Computer Science, 2015, 25(3): 561−576. |
| 15 | JUNG W, BANG H. Fault and failure tolerant model predictive control of quadrotor UAV. International Journal of Aeronautical and Space Sciences, 2021, 22(3): 663−675. |
| 16 | KE C X, CAI K Y, QUAN Q. Uniform passive fault-tolerant control of a quadcopter with one, two, or three rotor failure. IEEE Trans. on Robotics, 2023. DOI: 10.1109/TRO.2023.3297048. |
| 17 | BEYER Y, STEEN M, HECKER P. Incremental passive fault-tolerant control for quadrotors subjected to complete rotor failures. Journal of Guidance, Control, and Dynamics, 2023. DOI: 10.2514/1.G007475. |
| 18 | FREDDI A, LANZON A, LONGHI S. A feedback linearization approach to fault tolerance in quadrotor vehicles. IFAC Proceedings Volumes, 2011, 44(1): 5413−5418. |
| 19 | LIPPIELLO V, RUGGIERO F, SERRA D. Emergency landing for a quadrotor in case of a propeller failure: a PID based approach. Proc. of the IEEE International Symposium on Safety, Security, and Rescue Robotics. 2014, DOI: 10.1109/SSRR.2014.7017647. |
| 20 | LIPPIELLO V, RUGGIERO F, SERRA D. Emergency landing for a quadrotor in case of a propeller failure: a backstepping approach. Proc. of the IEEE/RSJ International Conference on Intelligent Robots and Systems, 2014: 4782−4788. |
| 21 | MUELLER M W, D’ANDREA R. Stability and control of a quadrocopter despite the complete loss of one, two, or three propellers. Proc. of the IEEE International Conference on Robotics and Automation, 2014: 45−52. |
| 22 | SUN S H, WANG X R, CHU Q P, et al. Incremental nonlinear fault-tolerant control of a quadrotor with complete loss of two opposing rotors. IEEE Trans. on Robotics, 2021, 37(1): 116−130. |
| 23 | SUN S H, BAERT M, VAN SCHIJNDEL B S, et al. Upset recovery control for quadrotors subjected to a complete rotor failure from large initial disturbances. Proc. of the IEEE International Conference on Robotics and Automation, 2020: 4273−4279. |
| 24 | ZHANG Y M, JIANG J. Bibliographical review on reconfigurable fault-tolerant control systems. Annual Reviews in Control, 2008, 32(2): 229−252. |
| 25 | HUANG P F, CHEN X L, CHAI Y, et al. A unified framework of fault detection and diagnosis based on fractional-order chaos system. Aerospace Science and Technology, 2022, 130: 107871. |
| 26 | FOURLAS G K, KARRAS G C. A survey on fault diagnosis methods for UAVs. Proc. of the International Conference on Unmanned Aircraft Systems, 2021: 394−403. |
| 27 | GHALAMCHI B, JIA Z, MUELLER M W. Real-time vibration-based propeller fault diagnosis for multicopters. IEEE/ASME Trans. on Mechatronics, 2020, 25(1): 395−405. |
| 28 | DU G X, SUN L. Loss of effectiveness information observability analysis for multicopters. Proc. of the International Conference on Advanced Robotics and Mechatronics, 2018: 572−576. |
| 29 | QUAN Q. Introduction to multicopter design and control. Singapore: Springer Singapore, 2017. |
| 30 | DAI X H, KE C X, QUAN Q, et al. RFlySim: automatic test platform for UAV autopilot systems with fpga-based hardware-in-the-loop simulations. Aerospace Science and Technology, 2021, 114: 106727. |
| 31 | QUAN Q. Reliable flight control: gravity-compensation-first principle. https://doi.org/10.48550/arXiv.2206.03746. |
| [1] | Yanjun YU, Chengfei YUE, Huayi LI, Yunhua WU, Xueqin CHEN. Modified filter for mean elements estimation with state jumping [J]. Journal of Systems Engineering and Electronics, 2024, 35(4): 999-1012. |
| [2] | Guang ZHAN, Kun ZHANG, Ke LI, Haiyin PIAO. UAV maneuvering decision-making algorithm based on deep reinforcement learning under the guidance of expert experience [J]. Journal of Systems Engineering and Electronics, 2024, 35(3): 644-665. |
| [3] | Jia ZHANG, Xin DU, Qichen DONG, Bin XIN. Distributed collaborative complete coverage path planning based on hybrid strategy [J]. Journal of Systems Engineering and Electronics, 2024, 35(2): 463-472. |
| [4] | Weijian PANG, Xinyi MA, Xueming LIANG, Xiaogang LIU, Erwa DONG. Role-based Bayesian decision framework for autonomous unmanned systems [J]. Journal of Systems Engineering and Electronics, 2023, 34(6): 1397-1408. |
| [5] | Jianhong WANG, RAMIREZ-MENDOZA Ricardo A., Yang XU. Nonlinear direct data-driven control for UAV formation flight system [J]. Journal of Systems Engineering and Electronics, 2023, 34(6): 1409-1418. |
| [6] | Yaozhong ZHANG, Zhuoran WU, Zhenkai XIONG, Long CHEN. A UAV collaborative defense scheme driven by DDPG algorithm [J]. Journal of Systems Engineering and Electronics, 2023, 34(5): 1211-1224. |
| [7] | Li PAN, Zhonghong WU, Minggang YU, Jintao LIU, Dan MEI. Strategy dominance mechanism of autonomous collaboration in unmanned swarm within the framework of public goods game [J]. Journal of Systems Engineering and Electronics, 2023, 34(5): 1252-1266. |
| [8] | Haichao ZHU, Weiyao LAN. Robust output regulation problem with prescribed performance for nonlinear strict feedback systems [J]. Journal of Systems Engineering and Electronics, 2023, 34(4): 1033-1041. |
| [9] | Minggang YU, Yanjie NIU, Xueda LIU, Dongge ZHANG, Peng ZHENG, Ming HE, Ling LUO. Adaptive dynamic reconfiguration mechanism of unmanned swarm topology based on an evolutionary game [J]. Journal of Systems Engineering and Electronics, 2023, 34(3): 598-614. |
| [10] | Chengwei PAN, Xia LIU, Yong CHEN, Meng LI. Finite-time fault-tolerant control of teleoperating cyber physical system against faults [J]. Journal of Systems Engineering and Electronics, 2023, 34(2): 469-478. |
| [11] | Jian WU, Yuning CHEN, Yongming HE, Lining XING, Yangrui HU. Survey on autonomous task scheduling technology for Earth observation satellites [J]. Journal of Systems Engineering and Electronics, 2022, 33(6): 1176-1189. |
| [12] | Weijian PANG, Hui LI, Xinyi MA, Hailin ZHANG. A semantic-centered cloud control framework for autonomous unmanned system [J]. Journal of Systems Engineering and Electronics, 2022, 33(4): 771-784. |
| [13] | Bei XU, Guanghan BAI, Yun’an ZHANG, Yining FANG, Junyong TAO. Failure analysis of unmanned autonomous swarm considering cascading effects [J]. Journal of Systems Engineering and Electronics, 2022, 33(3): 759-770. |
| [14] | Wanping SONG, Zengqiang CHEN, Mingwei SUN, Qinglin SUN. Reinforcement learning based parameter optimization of active disturbance rejection control for autonomous underwater vehicle [J]. Journal of Systems Engineering and Electronics, 2022, 33(1): 170-179. |
| [15] | Kaifang WAN, Bo LI, Xiaoguang GAO, Zijian HU, Zhipeng YANG. A learning-based flexible autonomous motion control method for UAV in dynamic unknown environments [J]. Journal of Systems Engineering and Electronics, 2021, 32(6): 1490-1508. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||