
Journal of Systems Engineering and Electronics ›› 2025, Vol. 36 ›› Issue (4): 1103-1112.doi: 10.23919/JSEE.2025.000090
• CONTROL THEORY AND APPLICATION • Previous Articles
Siji CHEN1,2( ), Bo JIANG1,2,*(), Hong XU2,3(), Tao PANG2(), Mingke GAO2()
), Bo JIANG1,2,*(), Hong XU2,3(), Tao PANG2(), Mingke GAO2()
Received:2024-08-28
Online:2025-08-18
Published:2025-09-04
Contact:
Bo JIANG
E-mail:cqchensj@foxmail.com;b26jiang@126.com;frankxuh@126.com;t_pang@126.com;michaelgar@foxmail.com
About author:Supported by:Siji CHEN, Bo JIANG, Hong XU, Tao PANG, Mingke GAO. High dynamic mobile topology-based clustering algorithm for UAV swarm networks[J]. Journal of Systems Engineering and Electronics, 2025, 36(4): 1103-1112.
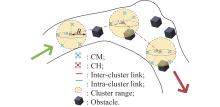
Fig 1
Clustering model in the UAV swarm network"
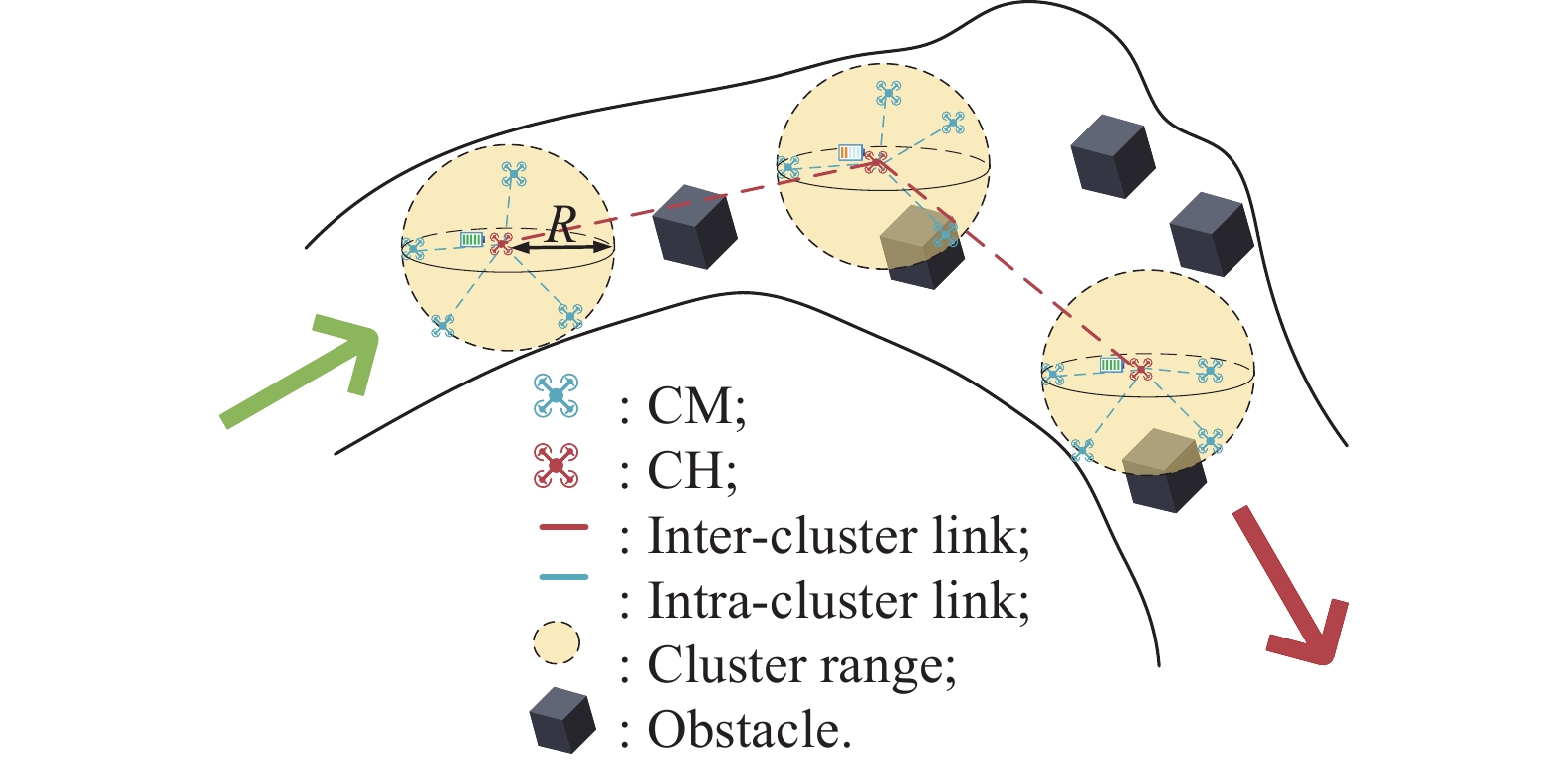
Fig 2
Relative movement models"
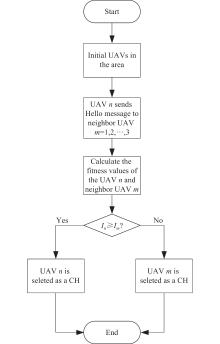
Fig 3
Flowchart of the proposed HDMTC algorithm"
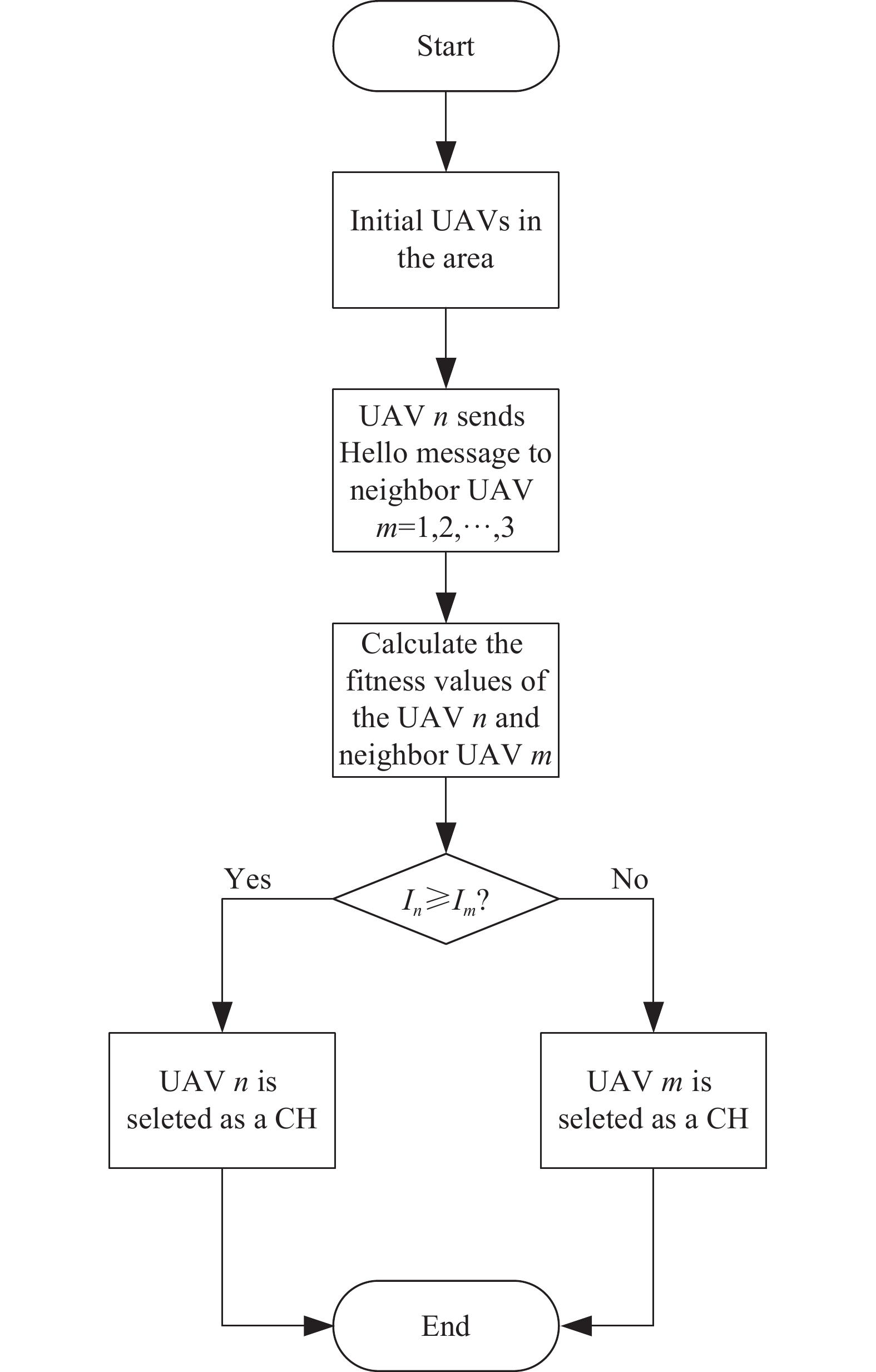
Table 1
Simulation parameters"
| Parameter | Value |
| Area size/m | 10×10 |
| Number of UAVs | 40 |
| Communication range/m | 3 |
| Speed/(m/s) | 1−4 |
| Initial energy E/J | 20 |
| Hello message period T/s | 0.1 |
| Number of obstacles | 5 |

Fig 4
Initial distribution and fitness values of UAVs"
Fig 5
Connectivity of UAVs of WCA"
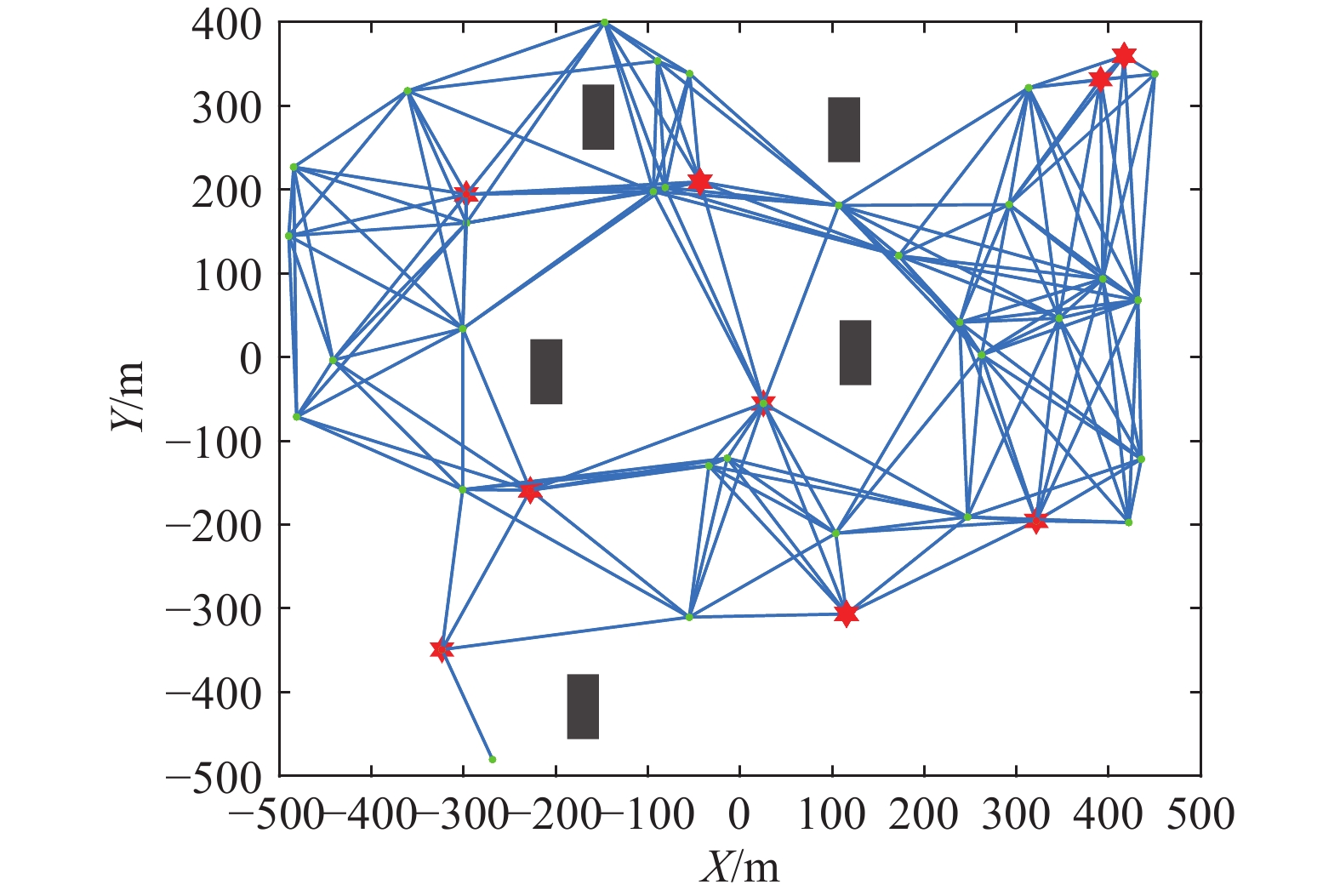
Fig 6
Connectivity of UAVs of the proposed HDMTC algorithm"
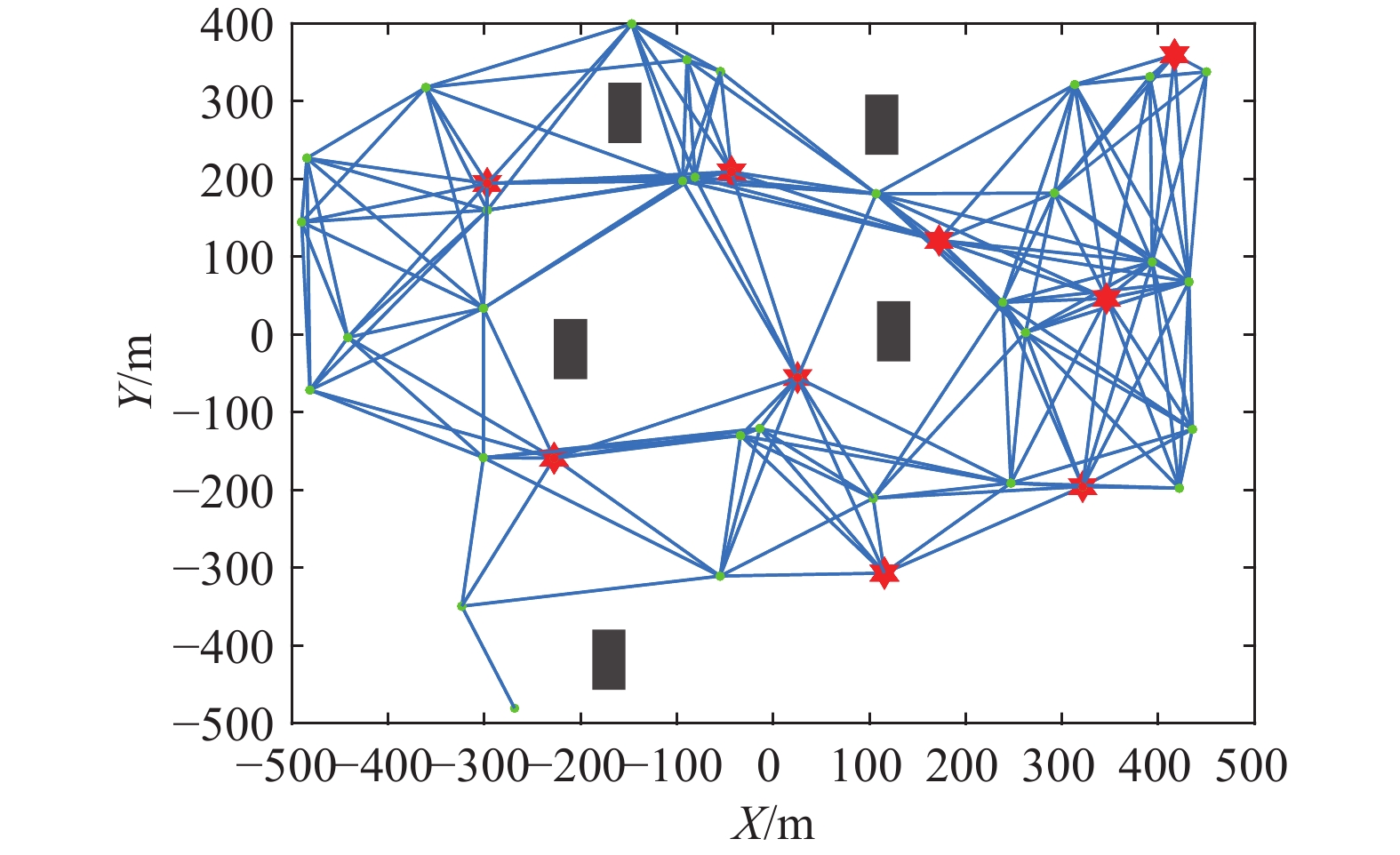
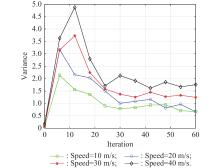
Fig 7
Variance of the number of UAVs in clusters in different iterations"
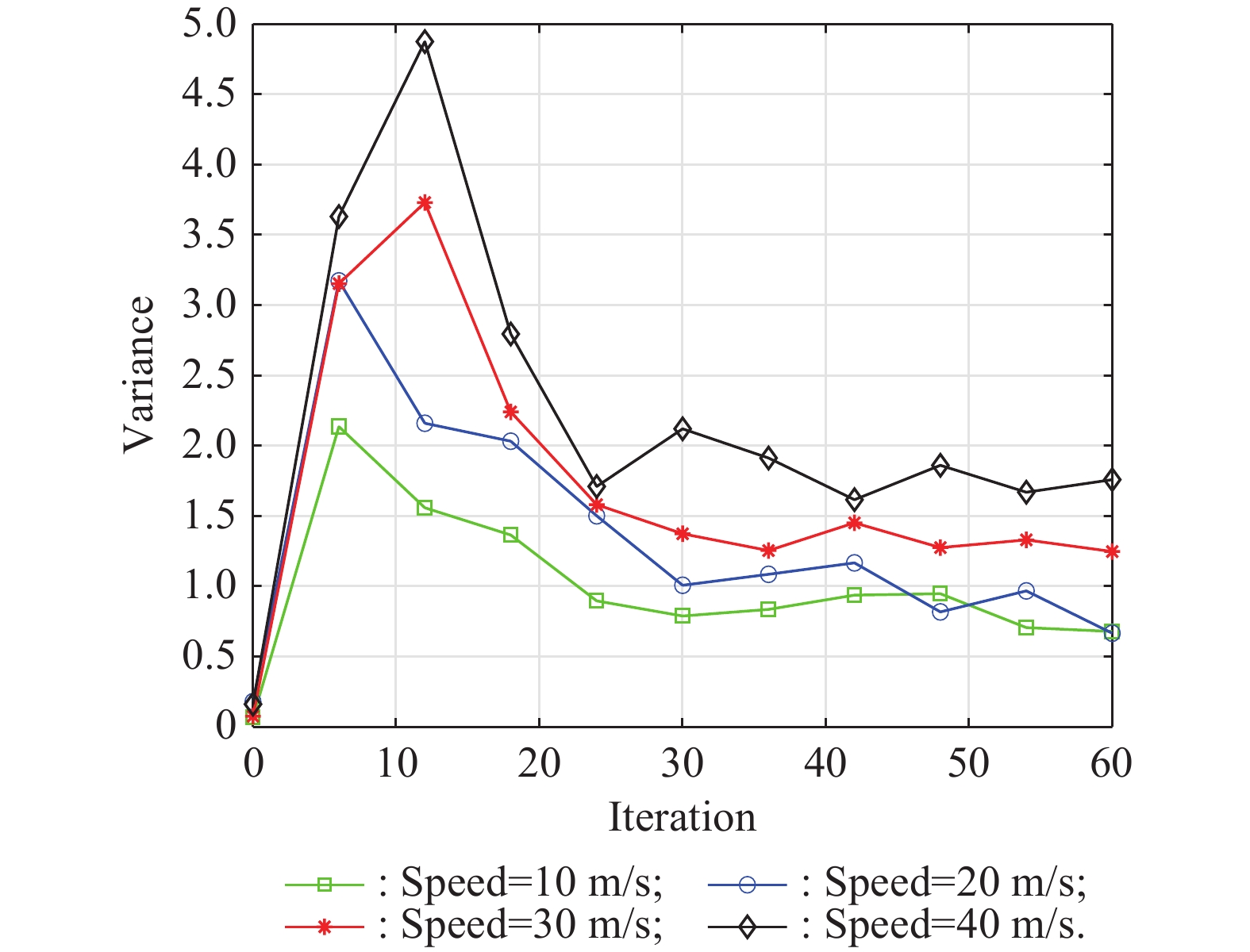
Fig 8
LET of the clusters under different UAV number"
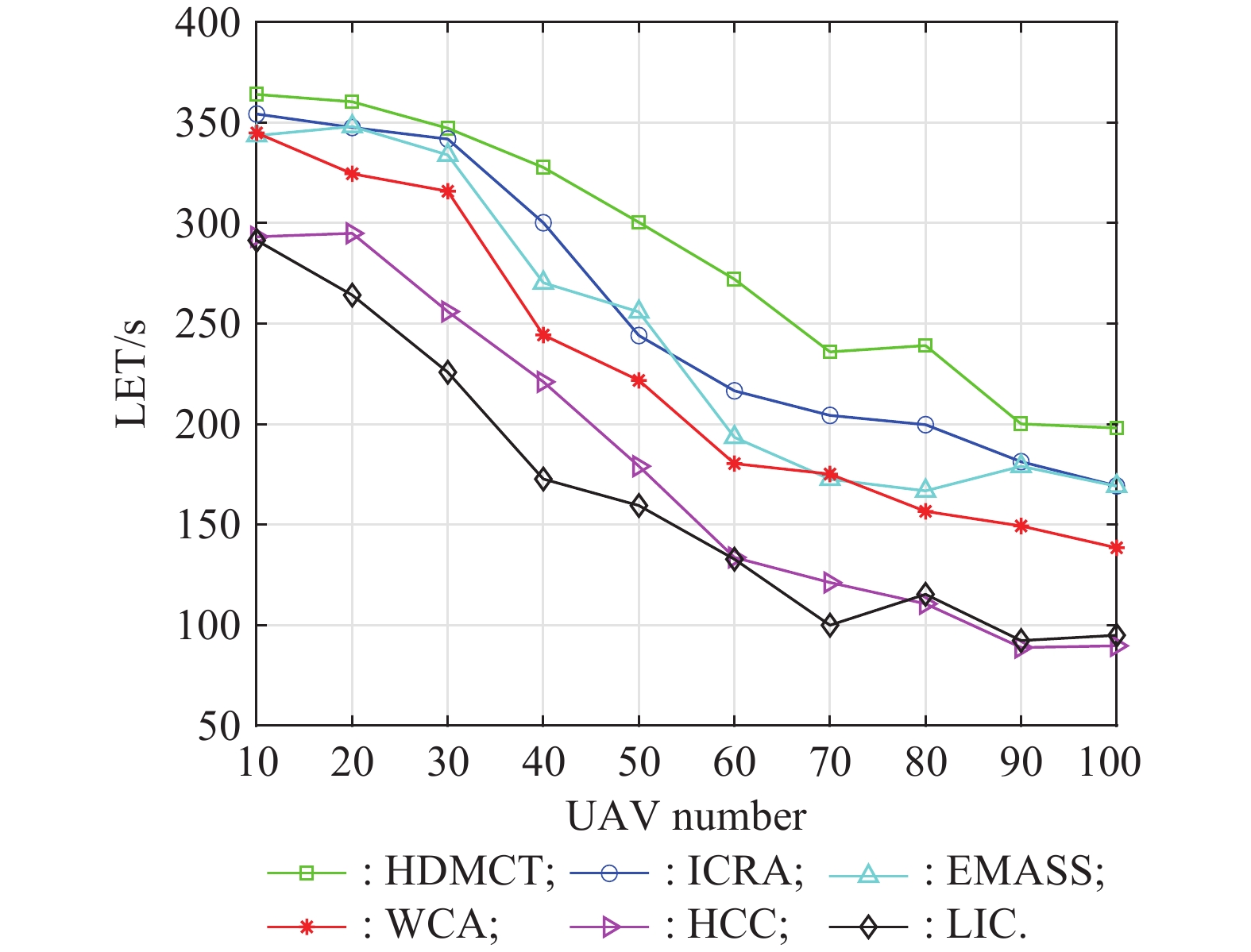
Fig 9
Minimum node lifetime with different UAV numbers"
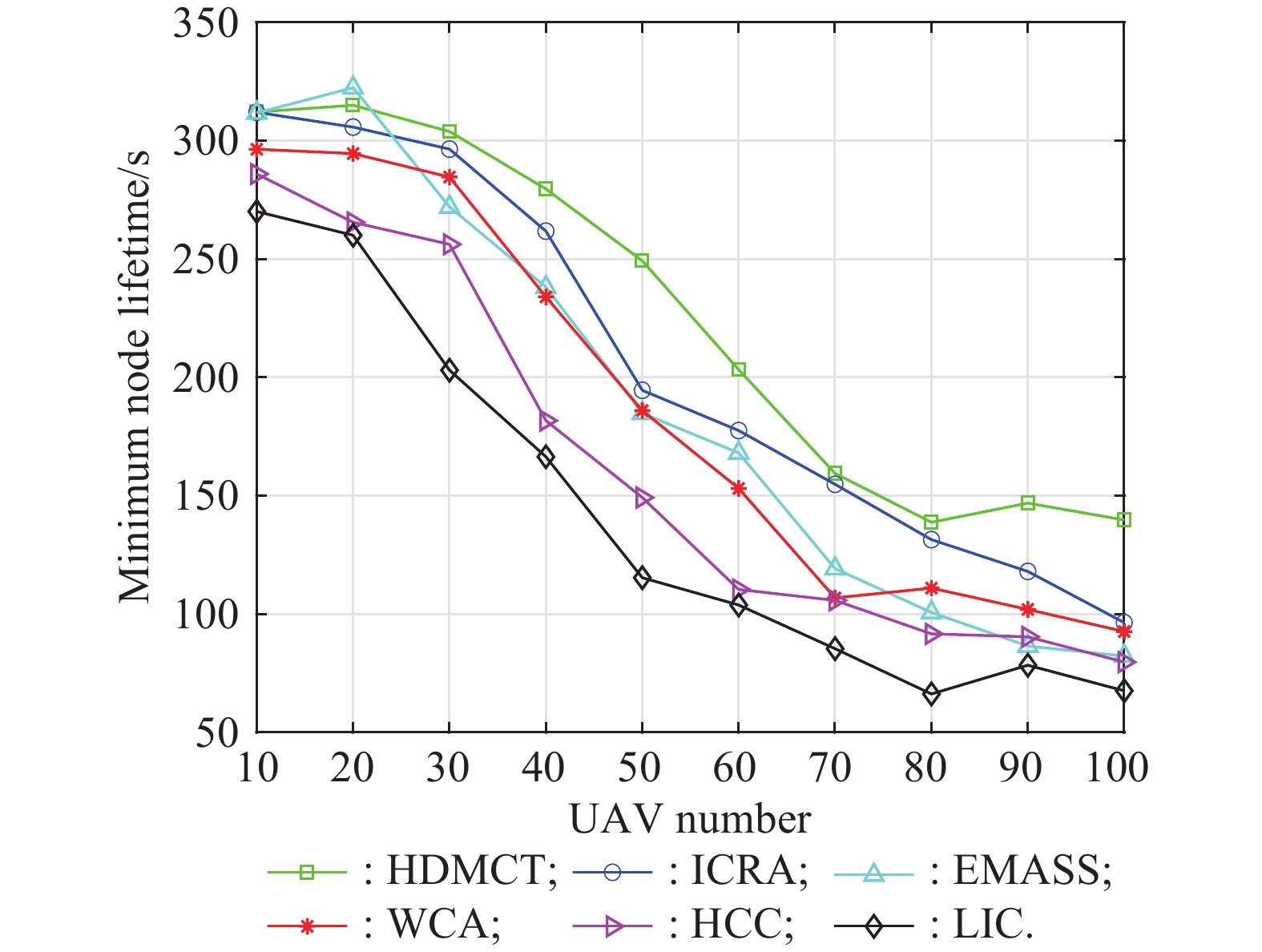
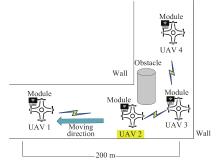
Fig 10
Topology structure of four UAVs"
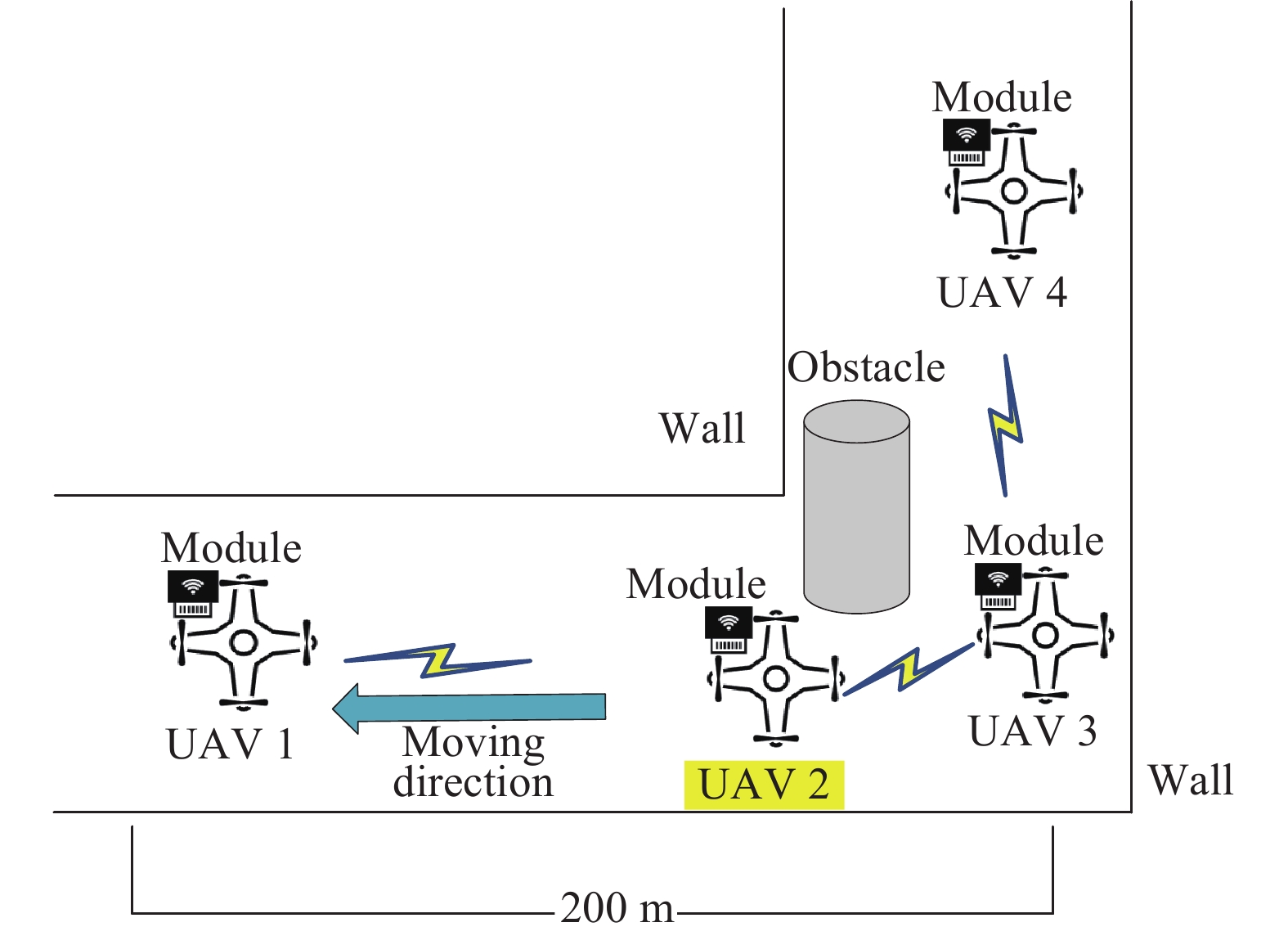

Fig 11
UAV and the network module carried"
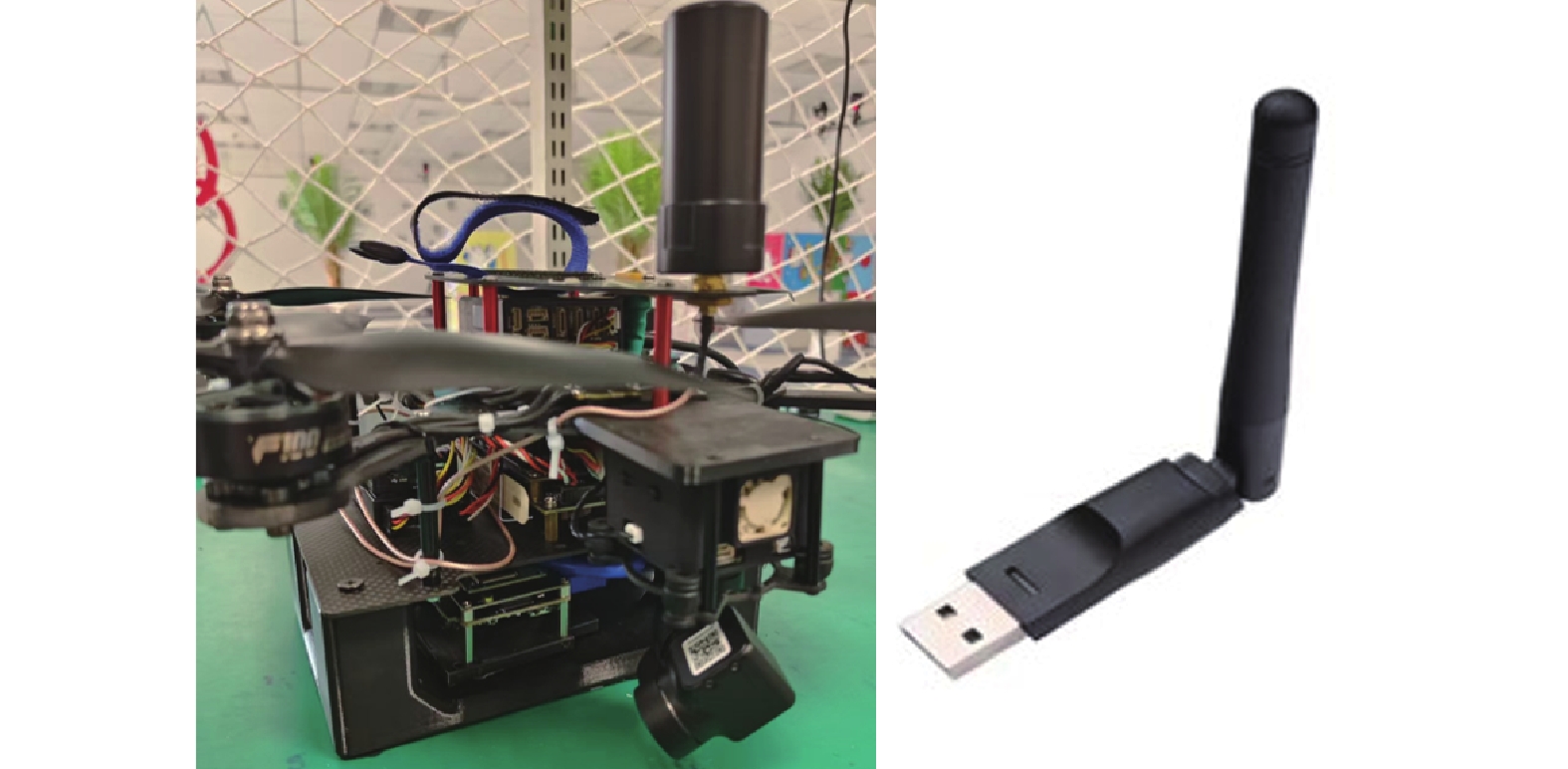

Fig 12
Transmission speed between UAV 1 and UAV 4"


Fig 13
Link reconnection time"

| 1 |
ARAGHIZADEH M A, TEYMOORI P, YAZDANI N, et al An efficient medium access control protocol for WSN-UAV. Ad Hoc Networks, 2016, 52, 146- 159.
doi: 10.1016/j.adhoc.2016.09.007 |
| 2 |
NGUYEN M T, NGUYEN C V, DO H T, et al UAV-assisted data collection in wireless sensor networks: a comprehensive survey. Electronics, 2021, 10 (21): 2603.
doi: 10.3390/electronics10212603 |
| 3 | ZHU B, BEDEER E, NGUYEN H H, et al Joint cluster head selection and trajectory planning in UAV-aided IoT networks by reinforcement learning with sequential model. IEEE Internet of Things Journal, 2021, 9 (14): 12071- 12084. |
| 4 | CAMPION M, RANGANATHAN P, FARUQUE S UAV swarm communication and control architectures: a review. Journal of Unmanned Vehicle Systems, 2018, 7 (2): 93- 106. |
| 5 |
NA Z, LI B, LIU X, et al UAV-based wide-area internet of things: an integrated deployment architecture. IEEE Network, 2021, 35 (5): 122- 128.
doi: 10.1109/MNET.001.2100128 |
| 6 | ISLAM N, RASHID M M, PASANDIDEH F, et al A review of applications and communication technologies for internet of things (IoT) and unmanned aerial vehicle (UAV) based sustainable smart farming. Sustainability, 2021, 13 (4): 1821. |
| 7 |
WEI Z, ZHU M, ZHANG N, et al UAV-assisted data collection for internet of things: a survey. IEEE Internet of Things Journal, 2022, 9 (17): 15460- 15483.
doi: 10.1109/JIOT.2022.3176903 |
| 8 |
JAVED S, HASSAN A, AHMAD R, et al State-of-the-art and future research challenges in UAV swarms. IEEE Internet of Things Journal, 2024, 11 (11): 19023- 19045.
doi: 10.1109/JIOT.2024.3364230 |
| 9 |
QIN B Y, ZHANG D, TANG S, et al Two-layer formation-containment fault-tolerant control of fixed-wing UAV swarm for dynamic target tracking. Journal of Systems Engineering and Electronics, 2023, 34 (6): 1375- 1396.
doi: 10.23919/JSEE.2023.000153 |
| 10 |
KE C X, CAI K Y, QUAN Q Analysis of a uniform passive fault-tolerant control method for multicopters. Journal of Systems Engineering and Electronics, 2024, 35 (6): 1574- 1582.
doi: 10.23919/JSEE.2024.000127 |
| 11 | LV S L, MAO P D, QUAN Q. Mean-field based time-optimal spatial iterative learning within the virtual tube. IEEE Control Systems Letters, 2024, 8: 2021−2026. |
| 12 | LV S L, GAO Y, CHE J X, et al. Autonomous drone racing: time-optimal spatial iterative learning control within a virtual tube. Proc. of the IEEE International Conference on Robotics and Automation, 2023: 3197−3203. |
| 13 | QUAN Q, FU R, LI M X, et al Practical distributed control for VTOL UAVS to pass a virtual tube. IEEE Trans. on Intelligent Vehicles, 2021, 7 (2): 342- 353. |
| 14 |
MAO P D, FU R L, QUAN Q Optimal virtual tube planning and control for swarm robotics. The International Journal of Robotics Research, 2024, 43 (5): 602- 627.
doi: 10.1177/02783649231210012 |
| 15 | MAO P D, QUAN Q. Making robotics swarm flow more smoothly: a regular virtual tube model. Proc. of the IEEE/RSJ International Conference on Intelligent Robots and Systems, 2022: 4498−4504. |
| 16 |
SUO W B, WANG M Y, ZHANG D, et al Formation control technology of fixed-wing UAV swarm based on distributed ad hoc network. Applied Sciences, 2022, 12 (2): 535.
doi: 10.3390/app12020535 |
| 17 | XIA X W, YAN Y H, LI Z J, et al. A survey of UAV clustering algorithm. Proc. of the 24th International Conference on Advanced Communication Technology, 2022: 191−196. |
| 18 |
SUN G Y, QIN D Y, LAN T T, et al Research on clustering routing protocol based on improved PSO in FANET. IEEE Sensors Journal, 2021, 21 (23): 27168- 27185.
doi: 10.1109/JSEN.2021.3117496 |
| 19 |
GERLA M, TZU-CHIEH TSAI J Multicluster, mobile, multimedia radio network. Wireless Networks, 1995, 1 (3): 255- 265.
doi: 10.1007/BF01200845 |
| 20 | PAREKH A K. Selecting routers in ad-hoc wireless networks. Proc. of the SBT/IEEE International Telecommunications, 1994: 420−424. |
| 21 | CHATTERJEE M, DAS S K, TURGUT D. An on-demand weighted clustering algorithm (WCA) for ad hoc networks. Proc. of the Global Telecommunications Conference, 2000: 1697−1701. |
| 22 |
AISSA M, ABDELHAFIDH M, MNAOUER A B EMASS: a novel energy, safety and mobility aware-based clustering algorithm for fanets. IEEE Access, 2021, 9, 105506- 105520.
doi: 10.1109/ACCESS.2021.3097323 |
| 23 | GUO J J, GAO H M, LIU Z Q, et al. ICRA: an intelligent clustering routing approach for UAV ad hoc networks. IEEE Trans. on Intelligent Transportation Systems, 2022, 24(2): 2447−2460. |
| 24 |
CHEN S J, JIANG B, PANG T, et al Firefly swarm intelligence based cooperative localization and automatic clustering for indoor FANETS. PloS One, 2023, 18 (3): e0282333.
doi: 10.1371/journal.pone.0282333 |
| 25 |
LIU D X, XU Y T, SHEN L, et al Self-organizing multiuser matching in cellular networks: a score-based mutually beneficial approach. IET Communications, 2016, 10 (15): 1928- 1937.
doi: 10.1049/iet-com.2016.0129 |
| [1] | Yan GAO, Chenggang BAI, Quan QUAN. A survey on passing-through control of multi-robot systems in cluttered environments [J]. Journal of Systems Engineering and Electronics, 2025, 36(4): 1037-1056. |
| [2] | Delong WU, Hao FANG, Yiren HAO, Aobo WANG. Outdoor navigation of millimeter-wave radar quadrotors based on optimal virtual tube [J]. Journal of Systems Engineering and Electronics, 2025, 36(4): 1057-1067. |
| [3] | Jiacheng TANG, Zixiao YANG, Lei ZHANG, Tianjiang HU, Bo ZHU. Regular virtual tube for cooperative transportation of a payload by multiple quadrotors [J]. Journal of Systems Engineering and Electronics, 2025, 36(4): 1068-1076. |
| [4] | Yangjie LYU, Yan GAO, Guoyuan QI. Multicopter interception control based on visual servo and virtual tube in a cluttered environment [J]. Journal of Systems Engineering and Electronics, 2025, 36(4): 1094-1102. |
| [5] | Yu Ziyue, Gong Bo & He Xingui. Virtual reality mobility model for wireless ad hoc networks [J]. Journal of Systems Engineering and Electronics, 2008, 19(4): 819-826. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||