
Journal of Systems Engineering and Electronics ›› 2025, Vol. 36 ›› Issue (5): 1317-1334.doi: 10.23919/JSEE.2025.000131
• CONTROL THEORY AND APPLICATION • Previous Articles
Xinru LIANG( ), Changsheng GAO(), Wuxing JING(), Ruoming AN()
), Changsheng GAO(), Wuxing JING(), Ruoming AN()
Received:2024-04-09
Online:2025-10-18
Published:2025-10-24
Contact:
Xinru LIANG
E-mail:lxinruu@163.com;gaocs@hit.edu.cn;jingwuxing@hit.edu.cn;anruoming@hit.edu.cn
About author:Supported by:Xinru LIANG, Changsheng GAO, Wuxing JING, Ruoming AN. A robust adaptive filtering algorithm for high-maneuvering hypersonic vehicles[J]. Journal of Systems Engineering and Electronics, 2025, 36(5): 1317-1334.

Fig 1
Flow of the proposed algorithm"
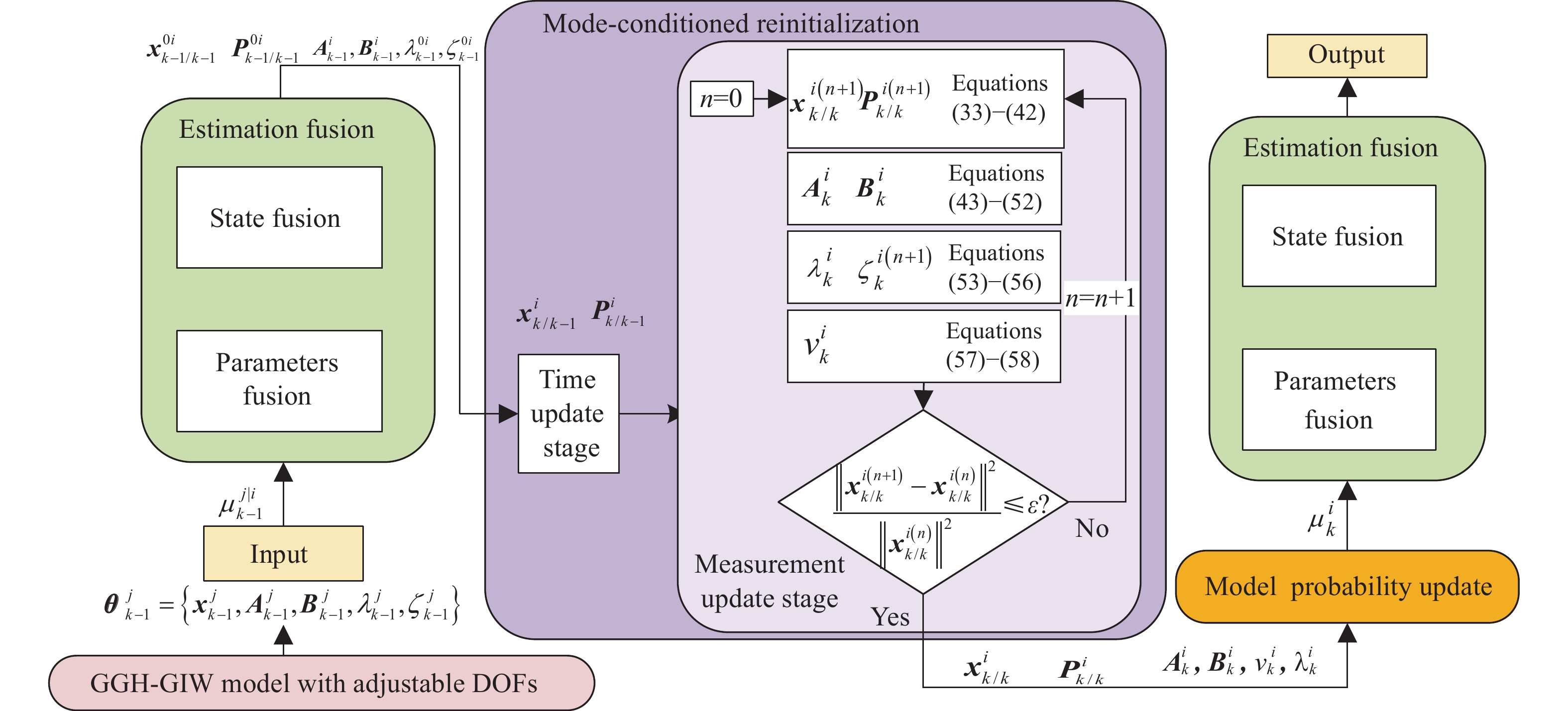
Table 1
Initial parameters of the hypersonic vehicle"
| Parameter | Value | Parameter | Value | |
| The reference area/m2 | 0.48 | Flight duration/s | 800 | |
| Longitude/(°) | −152 | Lift-drag ratio coefficient | 3.5 | |
| Latitude/(°) | 25 | Mass of the vehicle/kg | 907.2 |
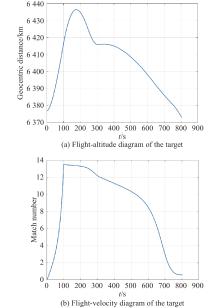
Fig 2
Flight trajectories in equilibrium glide"
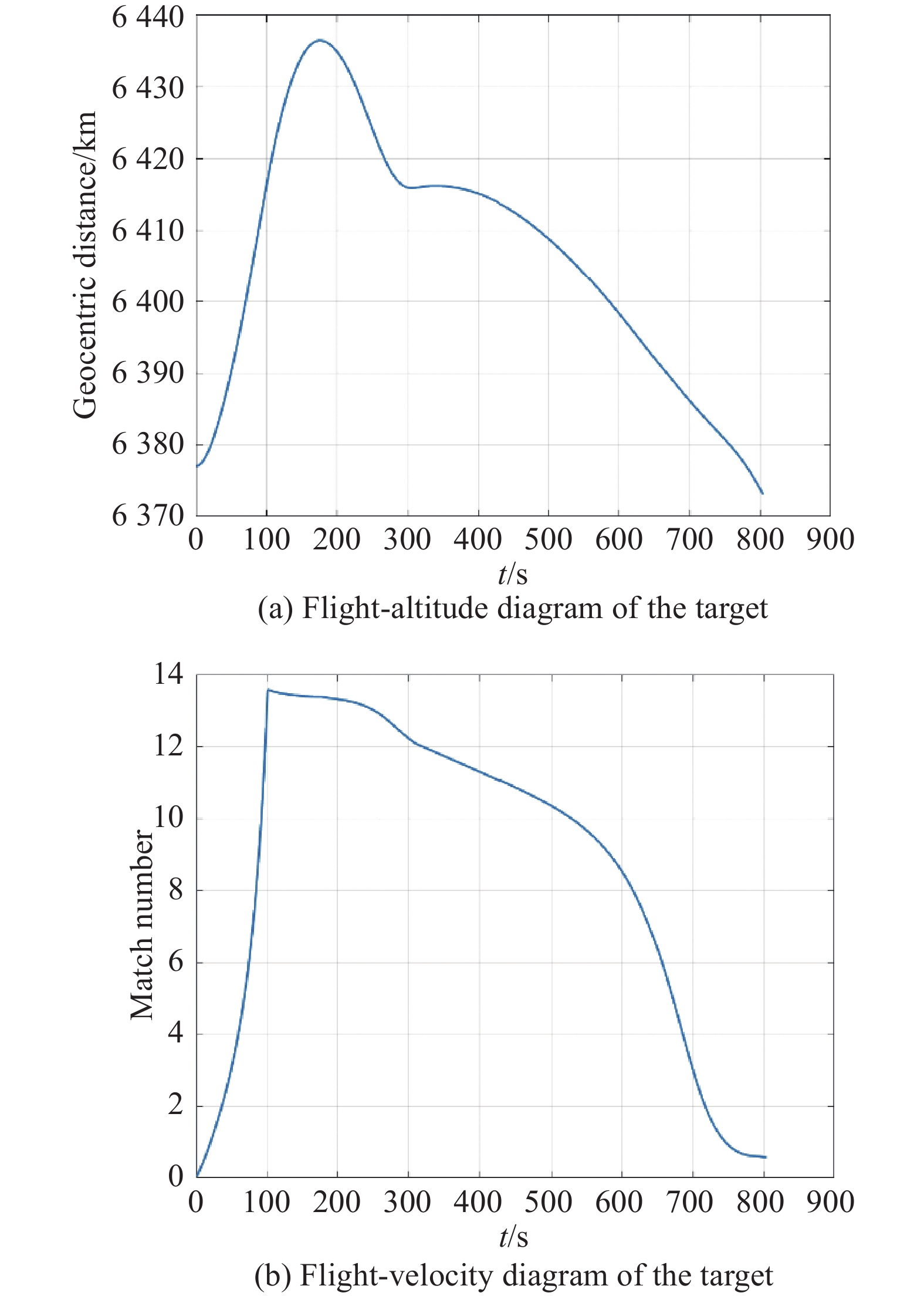
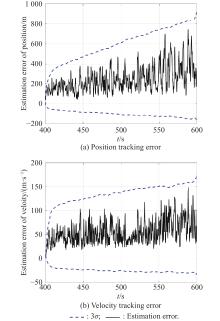
Fig 3
Tracking error of the proposed filtering algorithms in equilibrium glide under the light heavy-tailed measurement noise"
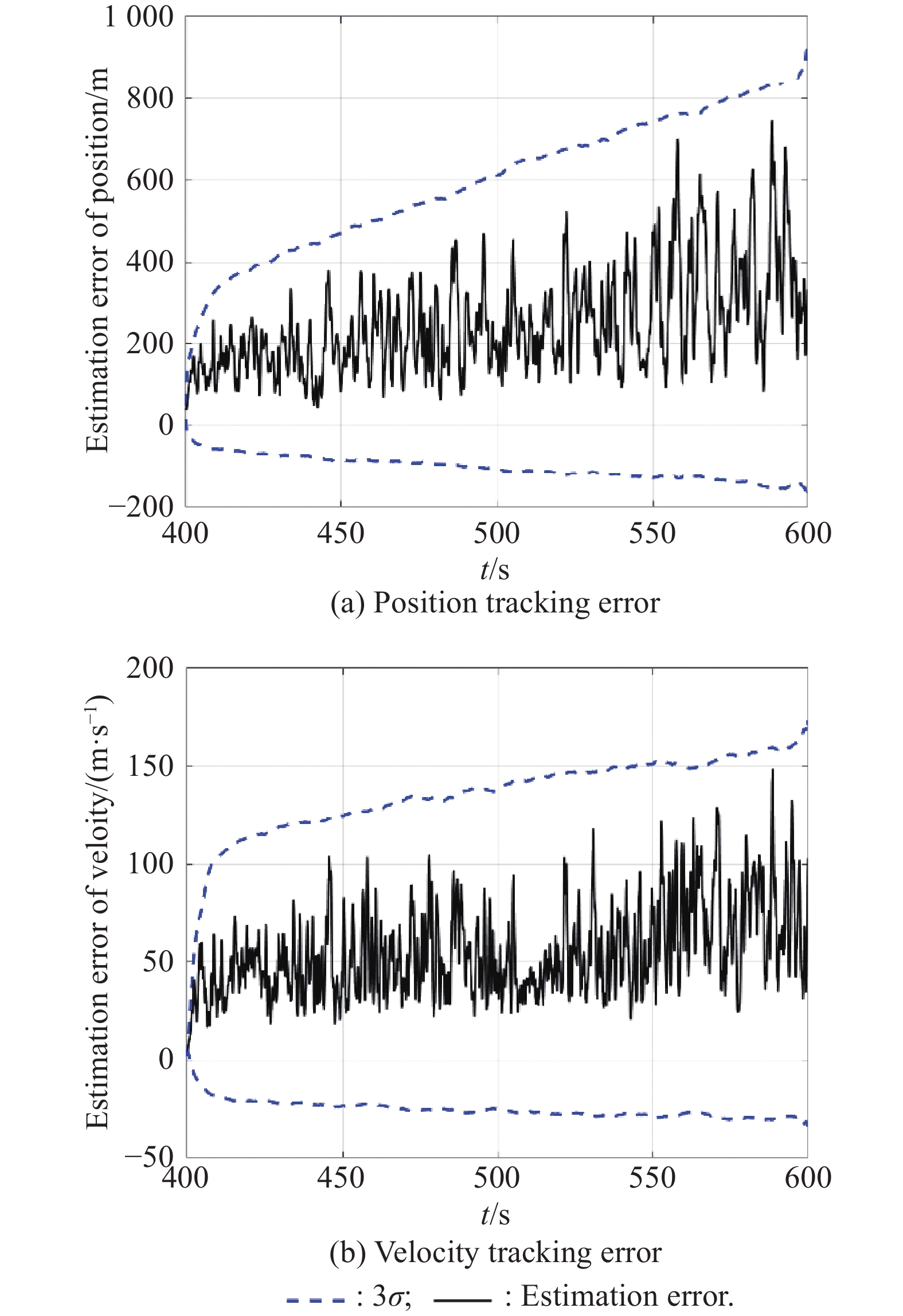
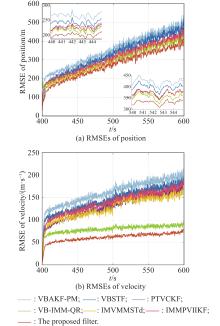
Fig 4
RMSE performances of different filtering algorithms in equilibrium glide under the light heavy-tailed measurement noise"

Table 2
ARMSEs and time of different algorithms in equilibrium glide under the light heavy-tailed measurement noise"
| Filtering algorithm | ARMSE of position/m | ARMSE of velocity/(m/s) | Time/s |
| VBAKF-PM | 365.227 | 164.937 | 3.527 |
| VBSTF | 341.172 | 146.109 | 4.127 |
| PTVCKF | 315.411 | 133.203 | 3.954 |
| IMVMMSTd | 312.046 | 123.217 | 10.789 |
| VB-IMM-QR | 305.129 | 80.653 | 11.556 |
| IMMPVIIKF | 317.426 | 141.366 | 11.485 |
| The proposed filter | 283.354 | 62.208 | 11.845 |
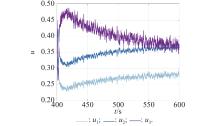
Fig 5
Transformation probability of each model under the light heavy-tailed measurement noise"

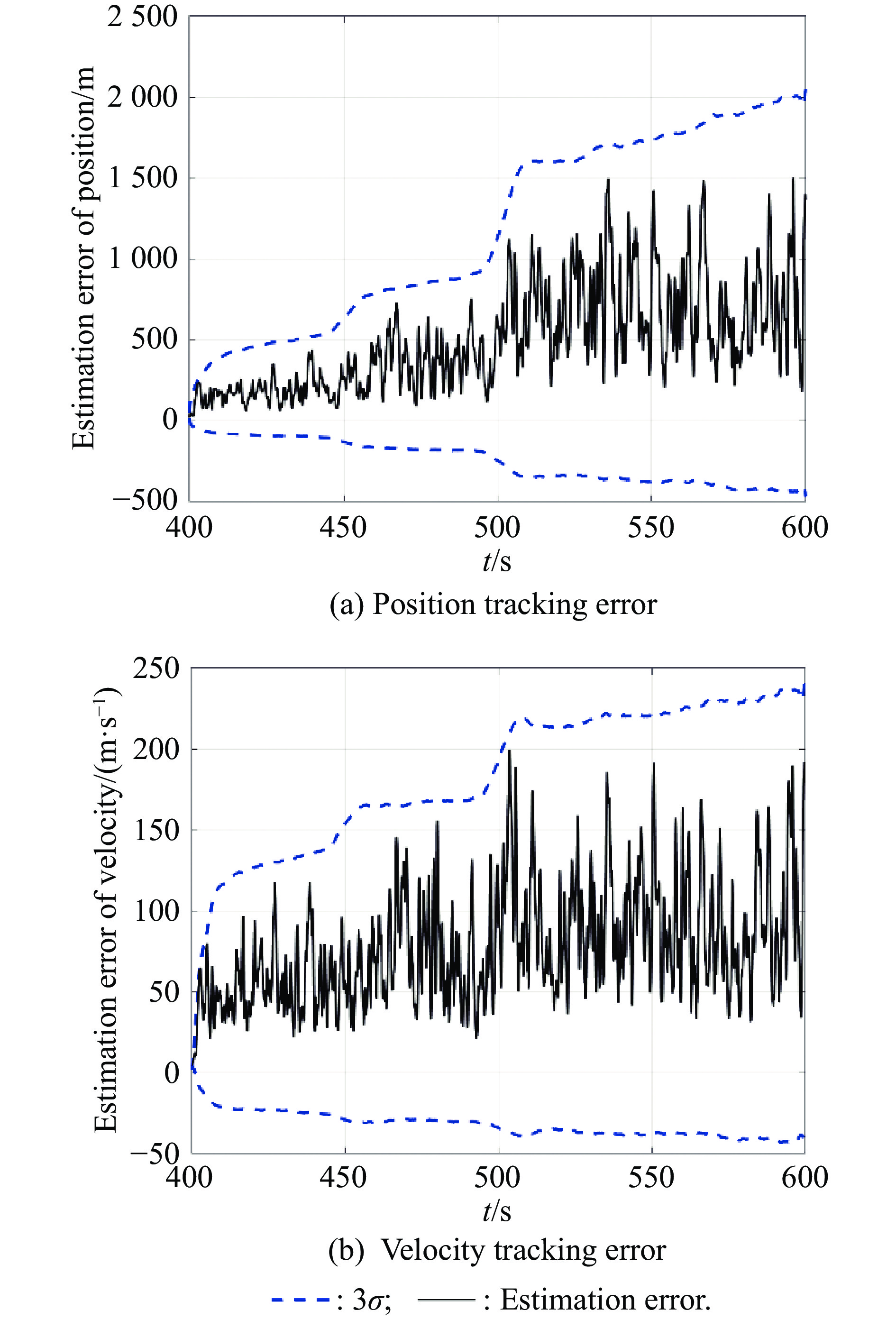
Fig 6
Tracking error of the proposed filtering algorithms in equilibrium glide under the strong heavy-tailed measurement noise"
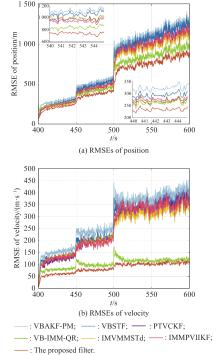
Fig 7
RMSE performances of different filtering algorithms in equilibrium glide under the strong heavy-tailed measurement noise"
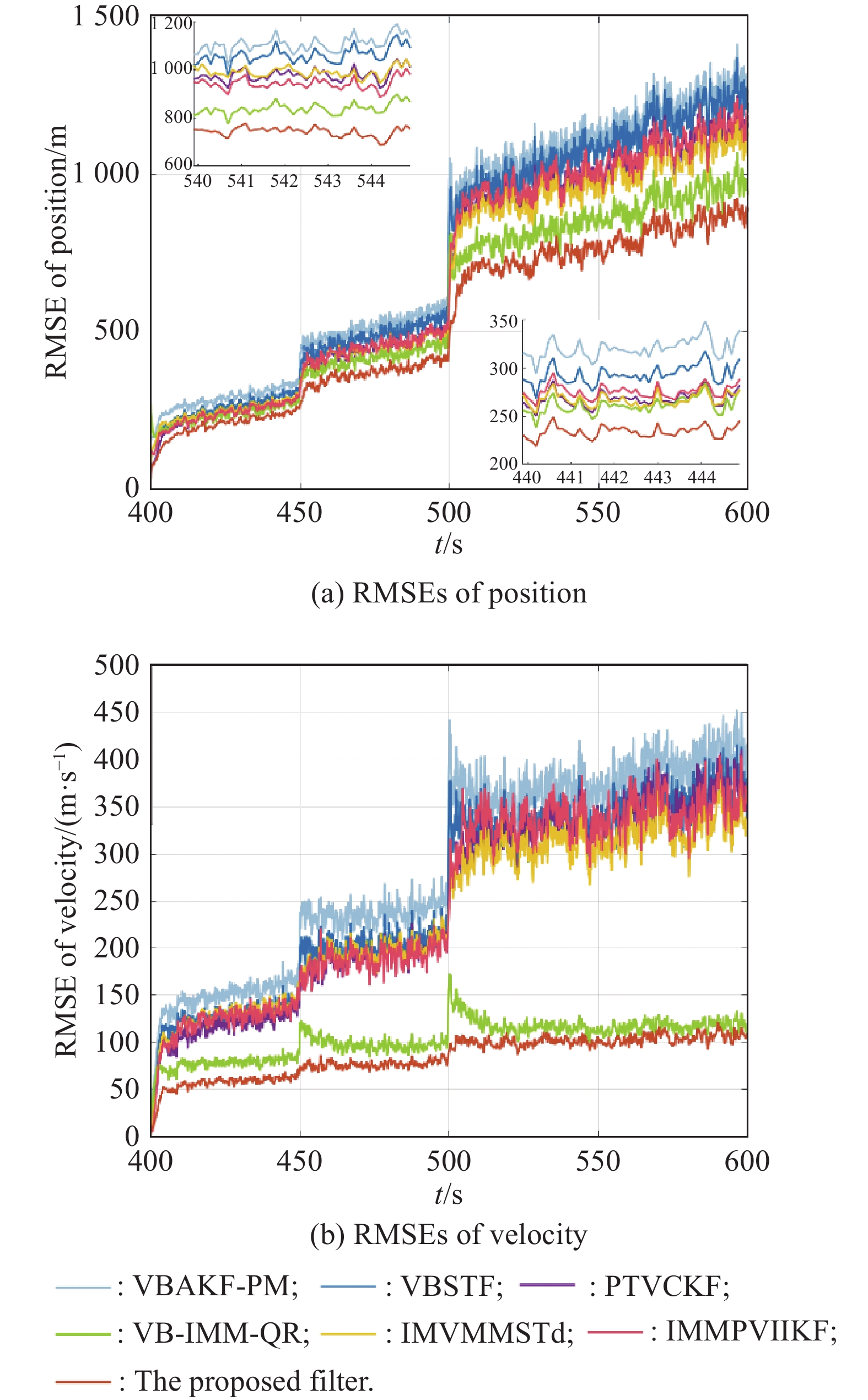
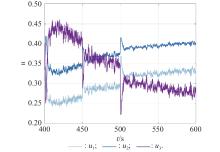
Fig 8
Transformation probability of each model in equilibrium glide under the strong heavy-tailed measurement noise"
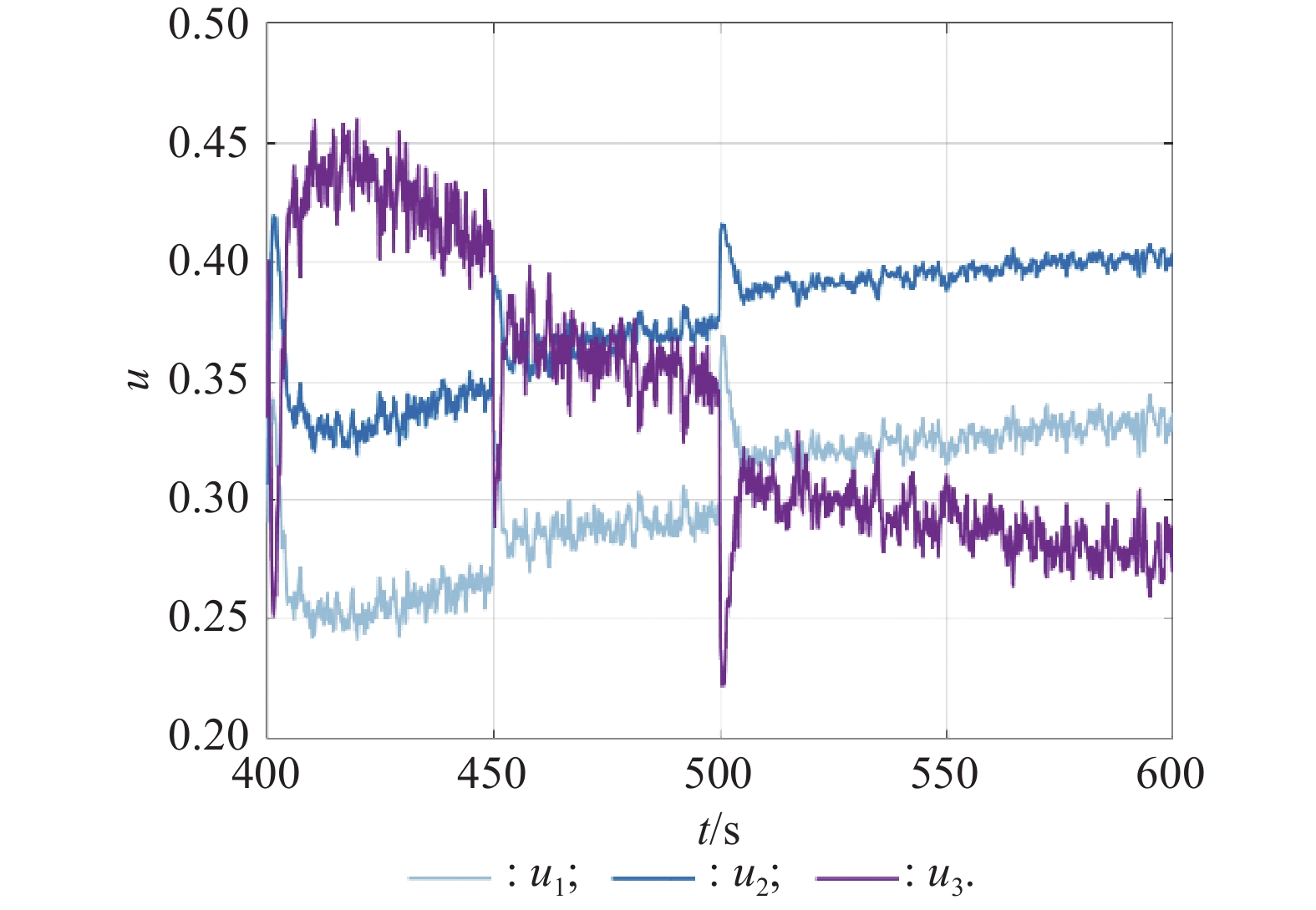
Table 3
ARMSE performances and time of different filtering algorithms in equilibrium glide"
| Filtering algorithm | ARMSE of position/m | ARMSE of velocity/(m/s) | Time/s |
| VBAKF-PM | 861.321 | 301.374 | 4.157 |
| VBSTF | 820.918 | 273.357 | 4.574 |
| PTVCKF | 760.853 | 264.495 | 4.264 |
| IMVMMSTd | 742.394 | 248.064 | 13.643 |
| VB-IMM-QR | 655.784 | 104.612 | 13.579 |
| IMMPVIIKF | 769.297 | 268.361 | 13.593 |
| The proposed filter | 591.468 | 86.598 | 13.885 |

Fig 9
Flight trajectories in skip-glide"

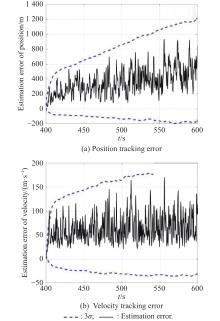
Fig 10
Tracking error of the proposed filtering algorithms in skip-glide under the light heavy-tailed measurement noise"
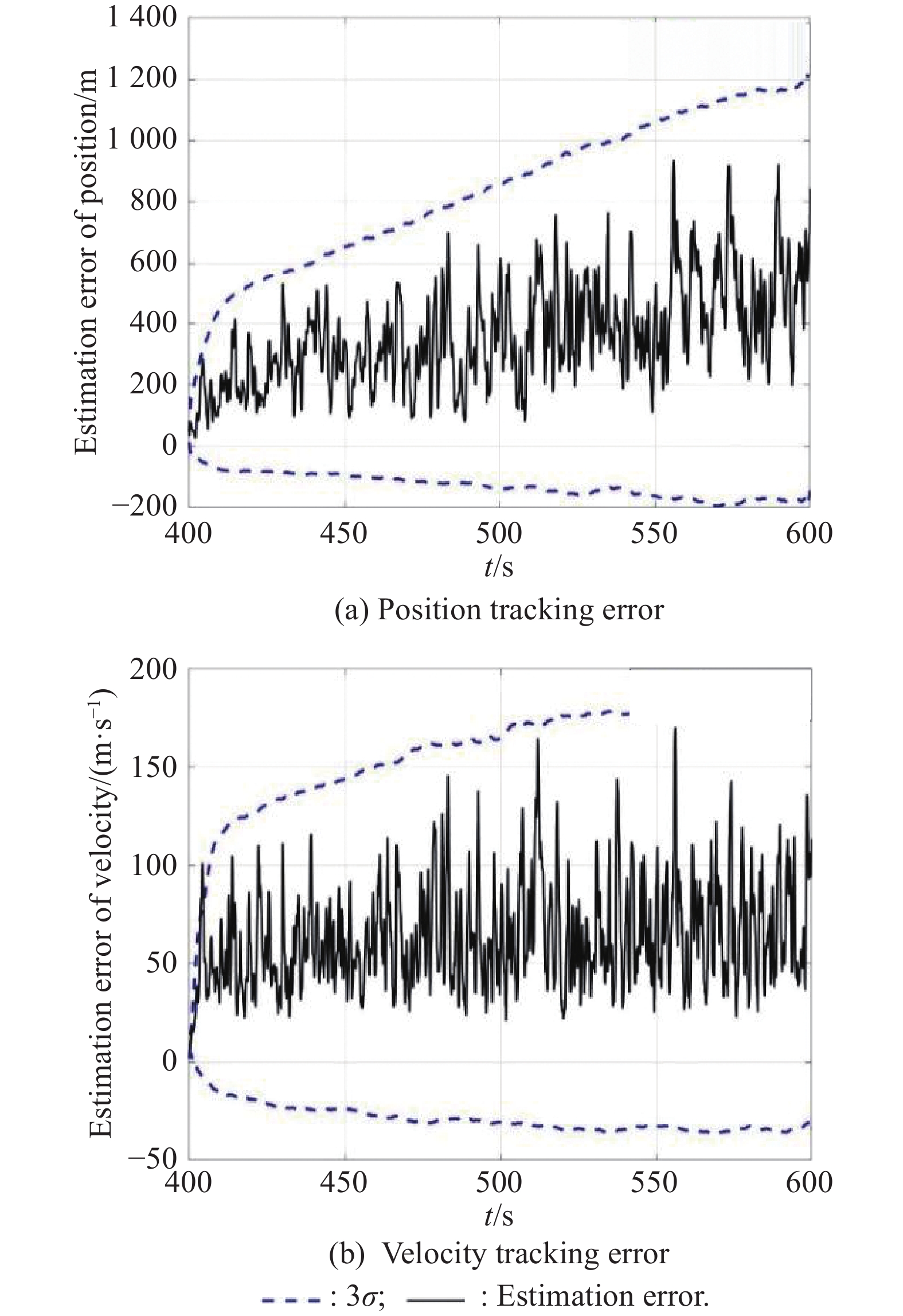
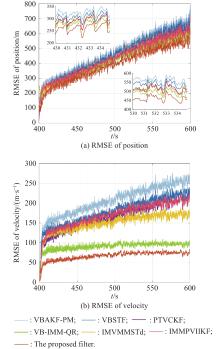
Fig 11
RMSE performances of different filtering algorithms in skip-glide under the light heavy-tailed measurement noise"

Table 4
ARMSE performances and time of different filtering algorithms in skip-glide under the light heavy-tailed measurement noise"
| Filtering algorithm | ARMSE of position/m | ARMSE of velocity/(m/s) | Time/s |
| VBAKF-PM | 495.172 | 210.333 | 4.922 |
| VBSTF | 481.323 | 182.714 | 5.497 |
| PTVCKF | 458.794 | 171.344 | 5.166 |
| MVMMSTd | 462.231 | 158.895 | 14.079 |
| VB-IMM-QR | 439.814 | 92.351 | 13.947 |
| IMMPVIIKF | 456.759 | 177.421 | 13.867 |
| The proposed filter | 406.005 | 72.764 | 14.135 |
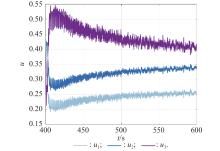
Fig 12
Transformation probability of each model under the light heavy-tailed measurement noise"

Fig 13
Tracking error of the proposed filtering algorithms in skip-glide under the strong heavy-tailed measurement noise"
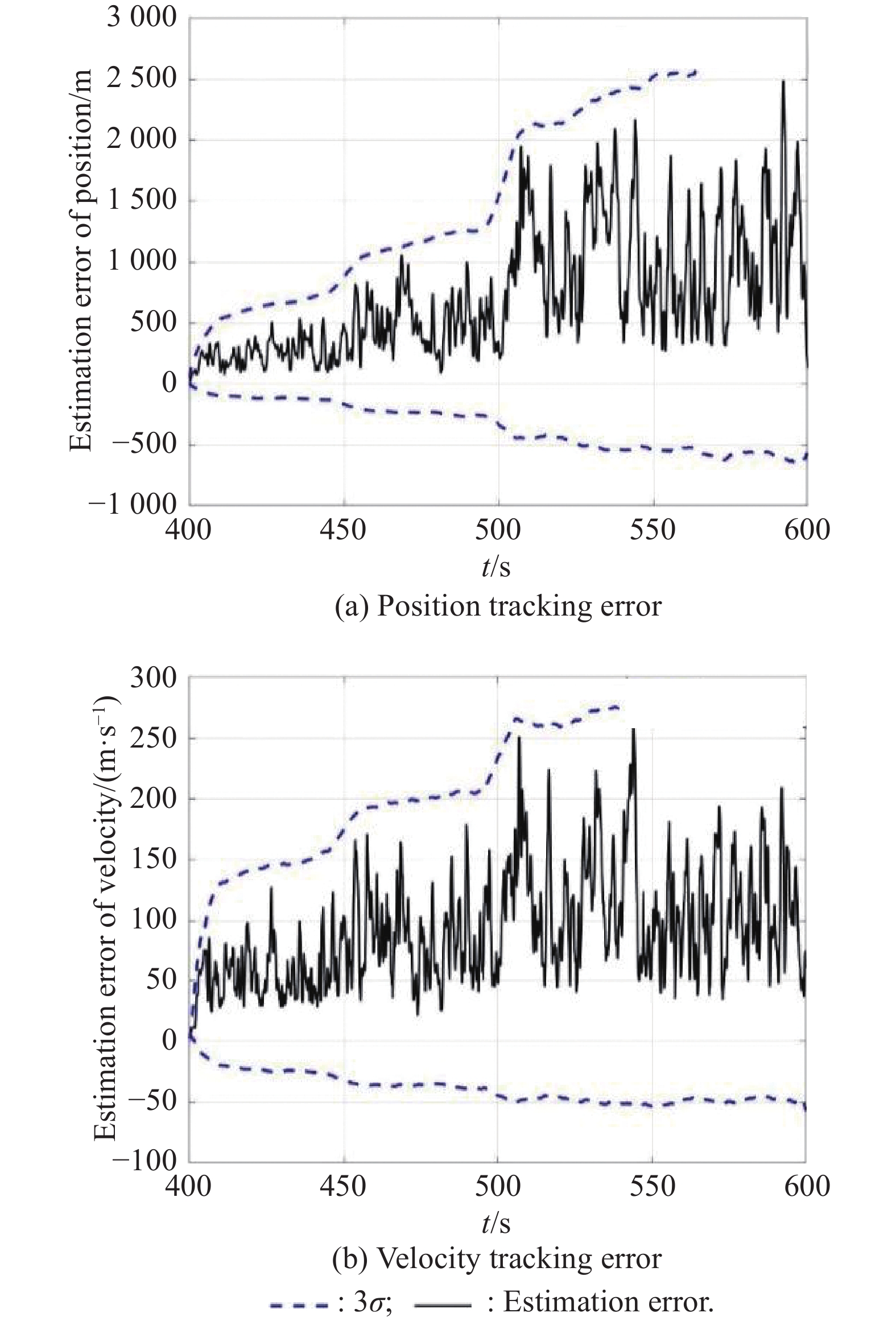
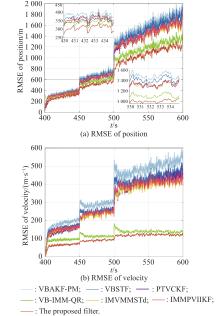
Fig 14
RMSE performances of different filtering algorithms in skip-glide under the strong heavy-tailed measurement noise"

Table 5
ARMSE performances and time of different filtering algorithms in skip-glide under strong heavy-tailed measurement noise"
| Filtering algorithm | ARMSE of position/m | ARMSE of velocity/(m/s) | Time/s |
| VBAKF-PM | 394.199 | 5.527 | |
| VBSTF | 347.543 | 6.027 | |
| PTVCKF | 341.537 | 5.854 | |
| MVMMSTd | 330.274 | 14.729 | |
| VB-IMM-QR | 926.278 | 132.933 | 14.606 |
| IMMPVIIKF | 354.058 | 14.585 | |
| The proposed filter | 829.630 | 102.396 | 14.845 |
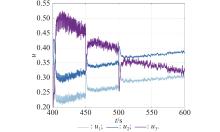
Fig 15
Transformation probability of each model in skip-glide under the strong heavy-tailed measurement noise"
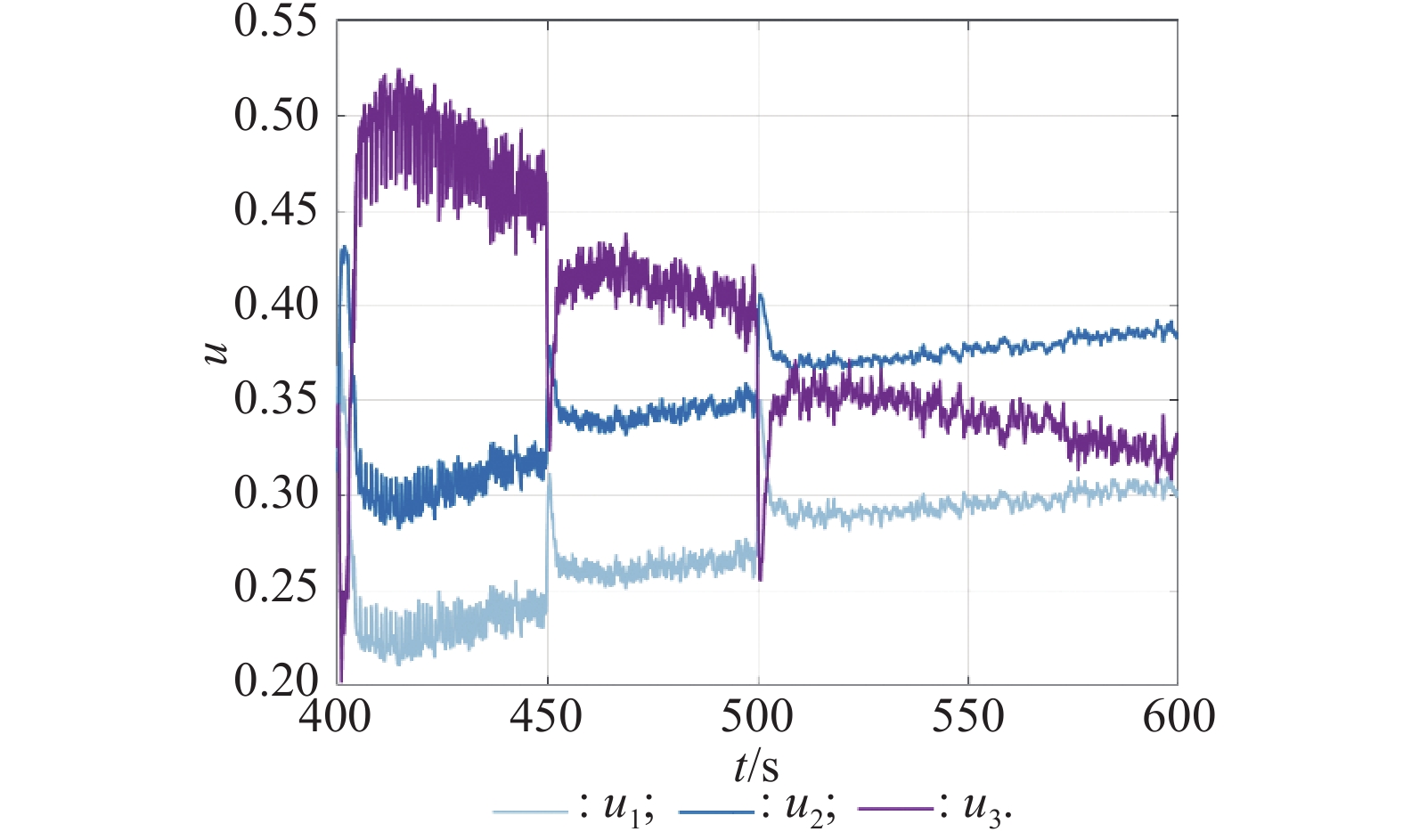

Fig 16
ARMSE performances of the proposed filtering algorithms in skip-glide"

| 1 |
CUI P, GAO C S, AN R M Fault-observer-based iterative learning model predictive controller for tra-jectory tracking of hypersonic vehi-cles. Journal of Systems Engineering and Electronics, 2025, 36 (3): 803- 813.
doi: 10.23919/JSEE.2025.000033 |
| 2 |
MA Y J, JIANG B, REN H Mini-mum eigenvalue based adaptive fault compensation for hypersonic vehicles. Journal of Systems Engineering and Electronics, 2023, 34 (2): 492- 500.
doi: 10.23919/JSEE.2023.000039 |
| 3 |
LI G, ZHANG H, TANG G Maneuver characteristics analysis for hypersonic glide vehicles. Aerospace Science and Technology, 2015, 43 (6): 321- 328.
doi: 10.1016/j.ast.2015.03.016 |
| 4 |
HU Y, GAO C S, LI J L, et al Maneuver mode analysis and parametric modeling for hypersonic glide vehicles. Aerospace Science and Technology, 2021, 119, 107166.
doi: 10.1016/j.ast.2021.107166 |
| 5 |
LIANG S, XU B, REN J Kalman-filter-based robust control for hypersonic flight vehicle with measurement noises. Aerospace Science and Technology, 2021, 112, 106566.
doi: 10.1016/j.ast.2021.106566 |
| 6 | QIN W T. Research on trajectory tracking filters of near-space hypersonic glide vehicle. Harbin: Harbin Institute of Technology, 2019. (in Chinese) |
| 7 |
BOLOGNANI S, TUBIANA L, ZIGLIOTTO M Extended Kalman filter tuning in sensorless PMSM drives. IEEE Trans. on Industry Applications, 2003, 39 (6): 1741- 1747.
doi: 10.1109/TIA.2003.818991 |
| 8 |
SARKKA S On unscented Kalman filtering for state estimation of continuous-time nonlinear systems. IEEE Trans. on Automatic Control, 2007, 52 (9): 1631- 1641.
doi: 10.1109/TAC.2007.904453 |
| 9 |
ARASARATNAM I, HAYKIN S Cubature Kalman filters. IEEE Trans. on Automatic Control, 2009, 54 (6): 1254- 1269.
doi: 10.1109/TAC.2009.2019800 |
| 10 |
BLOM H A P, BAR-SHALOM Y The interacting multiple model algorithm for systems with Markovian switching coefficients. IEEE Trans. on Automatic Control, 1988, 33 (8): 780- 783.
doi: 10.1109/9.1299 |
| 11 |
DENG X L, XIE J Y, NI H W Interacting multiple model algorithm with the unscented particle filter (UPF). Chinese Journal of Aeronautics, 2005, 18 (4): 366- 371.
doi: 10.1016/S1000-9361(11)60257-4 |
| 12 |
ZHOU J, LEI H M Coverage-based cooperative target acquisition for hypersonic interceptions. Science China Technological Sciences, 2018, 61 (10): 1575- 1587.
doi: 10.1007/s11431-017-9244-2 |
| 13 |
ZHANG S, GAO Y, LU Z X, et al Cooperative detection based on the adaptive interacting multiple model-information filtering algorithm. Aerospace Science and Technology, 2019, 93, 105310.
doi: 10.1016/j.ast.2019.105310 |
| 14 |
XU Y, SHMALIY Y S, CHEN X Y, et al Robust inertial navigation system/ultra wide band integrated indoor quadrotor localization employing adaptive interacting multiple model-unbiased finite impulse response/Kalman filter estimator. Aerospace Science and Technology, 2020, 98, 105683.
doi: 10.1016/j.ast.2020.105683 |
| 15 |
DING C W, ZHOU D, ZOU X G, et al Multiple model PHD filter for tracking sharply maneuvering targets using recursive RANSAC based adaptive birth estimation. Journal of Systems Engineering and Electronics, 2024, 35 (3): 780- 792.
doi: 10.23919/JSEE.2023.000134 |
| 16 |
ZHANG Z, ZHOU G Maneuvering target state estimation based on separate modeling of target trajectory shape and dynamic characteristics. Journal of Systems Engineering and Electronics, 2022, 33 (5): 1195- 1209.
doi: 10.23919/JSEE.2022.000115 |
| 17 |
SEAH C E, HWANG I Algorithm for performance analysis of the IMM algorithm. IEEE Trans. on Aerospace and Electronic Systems, 2011, 47 (2): 1114- 1124.
doi: 10.1109/TAES.2011.5751246 |
| 18 |
HWANG I, SEAH C E, LEE S A study on stability of the interacting multiple model algorithm. IEEE Trans. on Automatic Control, 2017, 62 (2): 901- 906.
doi: 10.1109/TAC.2016.2558156 |
| 19 | PICHE R, SARKKA S, HARTIKAINEN J. Recursive outlier-robust filtering and smoothing for nonlinear systems using the multivariate student-t distribution. Proc. of the IEEE International Workshop on Machine Learning for Signal Processing, 2012. DOI: 10.1109/MLSP.2012.6349794. |
| 20 |
DONG P, JING Z L, LEUNG H, et al The labeled multi-Bernoulli filter for multitarget tracking with glint noise. IEEE Trans. on Aerospace and Electronic Systems, 2019, 55 (5): 2253- 2268.
doi: 10.1109/TAES.2018.2884183 |
| 21 |
CHRISTMAS J, EVERSON R Robust autoregression: student-t innovations using variational Bayes. IEEE Trans. on Signal Processing, 2011, 59 (1): 48- 57.
doi: 10.1109/TSP.2010.2080271 |
| 22 |
LIU Y, WANG H, ZHANG W Robust parameter estimation with outlier-contaminated correlated measurements and applications to aerodynamic coefficient identification. Aerospace Science and Technology, 2021, 118, 106995.
doi: 10.1016/j.ast.2021.106995 |
| 23 | ROTH M, OZKAN E, GUSTAFSSON F. A student’s t filter for heavy tailed process and measurement noise. Proc. of the IEEE International Conference on Acoustics, Speech and Signal Processing, 2013. DOI: 10.1109/ICASSP.2013.6638770. |
| 24 |
HUANG Y L, ZHANG Y G, LI N, et al A novel robust student’s t-based Kalman filter. IEEE Trans. on Aerospace and Electronic Systems, 2017, 53 (3): 1545- 1554.
doi: 10.1109/TAES.2017.2651684 |
| 25 | PEARSON K Mathematical contributions to the theory of evolution, xix: second supplement to a memoir on skew variation. Philosophical Transactions of the Royal Society of London, Series A, Containing Papers of a Mathematical or Physical Character, 1916, 216, 429- 457. |
| 26 | BORIS CHOY S T, CHAN J S K Scale mixtures distributions in statistical modelling. Australian & New Zealand Journal of Statistics, 2008, 50 (2): 135- 146. |
| 27 | SUN J, KABAN A, GARIBALDI J M. Robust mixture modeling using the Pearson type VII distribution. Proc. of the International Joint Conference on Neural Networks, 2010. DOI: 10.1109/IJCNN.2010.5596560. |
| 28 |
HUANG Y L, ZHANG Y G, SHI P, et al Robust Kalman filters based on Gaussian scale mixture distributions with application to target tracking. IEEE Trans. on Systems, Man, and Cybernetics: Systems, 2019, 49 (10): 2082- 2096.
doi: 10.1109/TSMC.2017.2778269 |
| 29 | WEI X S, HUA B, WU Y H, et al. A Pearson-type VII distribution with adaptive parameters selection based interacting multiple model Kalman filter. IEEE Trans. on Circuits and Systems II: Express Briefs, 2023, 70(8): 3204−3208. |
| 30 |
CUI H R, WANG X X, GAO S H, et al A Gaussian mixture regression model based adaptive filter for non-Gaussian noise without a priori statistic. Signal Processing, 2022, 190, 108314.
doi: 10.1016/j.sigpro.2021.108314 |
| 31 |
LI W, JIA Y An information theoretic approach to interacting multiple model estimation. IEEE Trans. on Aerospace and Electronic Systems, 2015, 51 (3): 1811- 1825.
doi: 10.1109/TAES.2015.140542 |
| 32 |
BATTISTELLI G, CHISCI L Kullback–Leibler average, consensus on probability densities, and distributed state estimation with guaranteed stability. Automatica, 2014, 50 (3): 707- 718.
doi: 10.1016/j.automatica.2013.11.042 |
| 33 | LI W, JIA Y Adaptive filtering for jump Markov systems with unknown noise covariance. IET Control Theory & Applications, 2013, 7 (13): 1765- 1772. |
| 34 |
SHEN C, HUANG W A Kullback–Leibler-based IMM information filter for the jump Markov system with unknown noise. Circuits, Systems, and Signal Processing, 2018, 37 (9): 4065- 4081.
doi: 10.1007/s00034-017-0735-y |
| 35 |
WANG G, WANG X, ZHANG Y Variational Bayesian IMM-filter for JMSs with unknown noise covariances. IEEE Trans. on Aerospace and Electronic Systems, 2020, 56 (2): 1652- 1661.
doi: 10.1109/TAES.2019.2929975 |
| 36 | HUANG F, ZHANG J, ZHANG S Maximum Versoria criterion-based robust adaptive filtering algorithm. IEEE Trans. on Circuits and Systems II: Express Briefs, 2017, 64 (10): 1252- 1256. |
| 37 | JAIN S, MITRA R, BHATIA V. Kernel adaptive filtering based on maximum versoria criterion. Proc. of the IEEE International Conference on Advanced Networks and Telecommunications Systems, 2018. DOI: 10.1109/ANTS.2018.8710152. |
| 38 | JAIN S, MITRA R, BHATIA V Kernel recursive maximum versoria criterion algorithm using random Fourier features. IEEE Trans. on Circuits and Systems II: Express Briefs, 2021, 68 (7): 2725- 2729. |
| 39 | RADHIKA S, ALBU F, CHANDRASEKAR A Steady state mean square analysis of standard maximum versoria criterion based adaptive algorithm. IEEE Trans. on Circuits and Systems II: Express Briefs, 2021, 68 (4): 1547- 1551. |
| 40 |
ABDELRHMAN O M, DOU Y, LI S Performance analysis of the standard constrained maximum versoria criterion based adaptive algorithm. IEEE Signal Processing Letters, 2023, 30, 125- 129.
doi: 10.1109/LSP.2023.3242123 |
| 41 |
SHEN C, MIHAYLOVA L A flexible robust student’s t-based multimodel approach with maximum Versoria criterion. Signal Processing, 2021, 182, 107941.
doi: 10.1016/j.sigpro.2020.107941 |
| 42 | CHEN B D, ZHU Y, HU J C, et al. System parameter identification: information criteria and algorithms. Oxford: Newens, 2013. |
| 43 | BISHOP C. Pattern recognition and machine learning. Berlin: Springer, 2007. |
| 44 |
CUI H R, MIHAYLOVA L, WANG X X, et al Uncertainty-aware variational inference for target tracking. IEEE Trans. on Aerospace and Electronic Systems, 2023, 59 (1): 258- 273.
doi: 10.1109/TAES.2022.3184283 |
| 45 | PRODANOV E M. Classification of the real roots of the quartic equation and their Pythagorean tunes. International Journal of Applied and Computational Mathematics, 2021, 7: 218. |
| 46 |
CHEN B D, LIU X, ZHAO H Q, et al Maximum correntropy Kalman filter. Automatica, 2017, 76, 70- 77.
doi: 10.1016/j.automatica.2016.10.004 |
| 47 | LI L, WANG G H, ZHANG X Y A sine-AIMM tracking algorithm for near space hypersonic slippage leap maneuvering target. Journal of Astronautics, 2021, 42 (5): 581- 590. |
| 48 | HUANG Y L, ZHANG Y G, WU Z M, et al A novel adaptive Kalman filter with inaccurate process and measurement noise covariance matrices. IEEE Trans. on Automatic Control, 2017, 63 (2): 594- 601. |
| 49 | LI Z. Research on flight patrerns and trajectory prediction algorithm for the hypersonic vehicle. Harbin: Harbin Institute of Technology, 2020. (in Chinese) |
| [1] | Peng CUI, Changsheng GAO, Ruoming AN. Fault-observer-based iterative learning model predictive controller for trajectory tracking of hypersonic vehicles [J]. Journal of Systems Engineering and Electronics, 2025, 36(3): 803-813. |
| [2] | Zhixian LIU, Wei SHAO, Xi CHENG, Haiyan OU, Xiao DING. Feature selection for determining input parameters in antenna modeling [J]. Journal of Systems Engineering and Electronics, 2025, 36(1): 15-23. |
| [3] | Yue ZHANG, Jiang JIANG, Kewei YANG, Xingliang WANG, Chi XU, Minghao LI. Intelligent modeling method for OV models in DoDAF2.0 based on knowledge graph [J]. Journal of Systems Engineering and Electronics, 2025, 36(1): 139-154. |
| [4] | Wei LI, Yue WANG, Lijuan JIA, Senran PENG, Ruixi HE. Battlefield target intelligence system architecture modeling and system optimization [J]. Journal of Systems Engineering and Electronics, 2024, 35(5): 1190-1210. |
| [5] | Tao WANG, Zhi ZHU, Xin ZHOU, Tian JING, Wei CHEN. A function-based behavioral modeling method for air combat simulation [J]. Journal of Systems Engineering and Electronics, 2024, 35(4): 945-954. |
| [6] | Yuran LI, Yichen LI, Monan ZHANG, Wenbin YU, Xinping GUAN. Real-time tracking of fast-moving object in occlusion scene [J]. Journal of Systems Engineering and Electronics, 2024, 35(3): 741-752. |
| [7] | Ruihan ZHANG, Bing SUN. Complex adaptive system theory, agent-based modeling, and simulation in dominant technology formation [J]. Journal of Systems Engineering and Electronics, 2024, 35(1): 130-153. |
| [8] | Weijian PANG, Xinyi MA, Xueming LIANG, Xiaogang LIU, Erwa DONG. Role-based Bayesian decision framework for autonomous unmanned systems [J]. Journal of Systems Engineering and Electronics, 2023, 34(6): 1397-1408. |
| [9] | Xinlong LE, Xibin CAO, Yu DAI, Fan WU. Method of SLAS’s ground track manipulation based on tangential impulse thrust [J]. Journal of Systems Engineering and Electronics, 2023, 34(5): 1285-1293. |
| [10] | Yi NAN, Guoxing YI, Lei HU, Changhong WANG, Zhenbiao TU. Influencing factor analysis of interception probability and classification-regression neural network based estimation [J]. Journal of Systems Engineering and Electronics, 2023, 34(4): 992-1006. |
| [11] | Yimin FENG, Chenchu ZHOU, Qiang ZOU, Yusheng LIU, Jiyuan LYU, Xinfeng WU. A goal-based approach for modeling and simulation of different types of system-of-systems [J]. Journal of Systems Engineering and Electronics, 2023, 34(3): 627-640. |
| [12] | Yajie MA, Bin JIANG, Hao REN. Minimum eigenvalue based adaptive fault compensation for hypersonic vehicles [J]. Journal of Systems Engineering and Electronics, 2023, 34(2): 492-500. |
| [13] | Zhuanhua ZHANG, Gongjian ZHOU. Maneuvering target state estimation based on separate modeling of target trajectory shape and dynamic characteristics [J]. Journal of Systems Engineering and Electronics, 2022, 33(5): 1195-1209. |
| [14] | Jinfeng LYU, Fucai LIU, Yaxue REN. Fuzzy identification of nonlinear dynamic system based on selection of important input variables [J]. Journal of Systems Engineering and Electronics, 2022, 33(3): 737-747. |
| [15] | Fan WANG, Pengfei FAN, Yonghua FAN, Bin XU, Jie YAN. Robust adaptive control of hypersonic vehicle considering inlet unstart [J]. Journal of Systems Engineering and Electronics, 2022, 33(1): 188-196. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||