
Journal of Systems Engineering and Electronics ›› 2025, Vol. 36 ›› Issue (3): 803-813.doi: 10.23919/JSEE.2025.000033
• CONTROL THEORY AND APPLICATION • Previous Articles
Peng CUI( ), Changsheng GAO(), Ruoming AN()
), Changsheng GAO(), Ruoming AN()
Received:2024-05-09
Accepted:2025-03-02
Online:2025-06-18
Published:2025-07-10
Contact:
Changsheng GAO
E-mail:pc20211011@163.com;gaocs@hit.edu.cn;anruoming@hit.edu.cn
About author:Supported by:Peng CUI, Changsheng GAO, Ruoming AN. Fault-observer-based iterative learning model predictive controller for trajectory tracking of hypersonic vehicles[J]. Journal of Systems Engineering and Electronics, 2025, 36(3): 803-813.
Add to citation manager EndNote|Reference Manager|ProCite|BibTeX|RefWorks
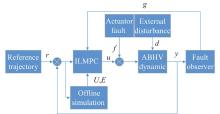
Fig 1
FOBILMPC framework"
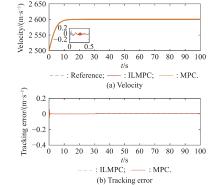
Fig 2
Velocity tracking of MPC and ILMPC"
Fig 3
Altitude tracking by MPC and ILMPC"
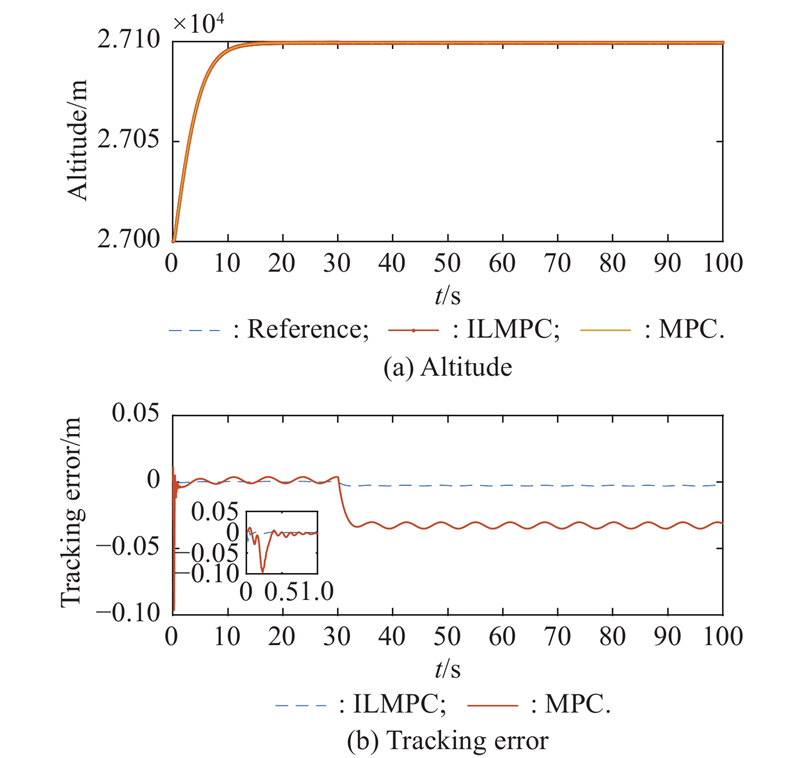
Fig 4
Angle changes of MPC and ILMPC"
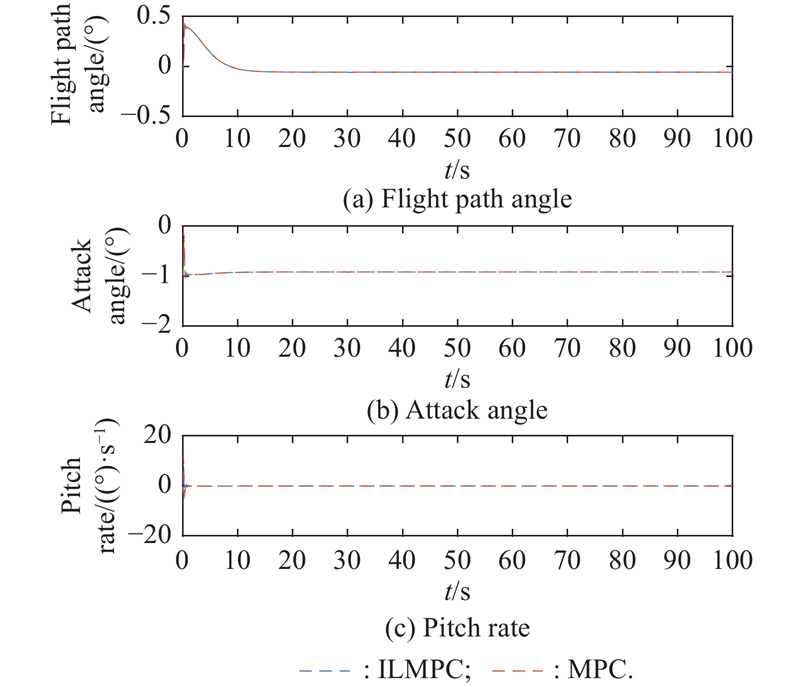
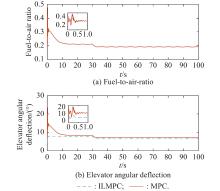
Fig 5
Control inputs for MPC and ILMPC"
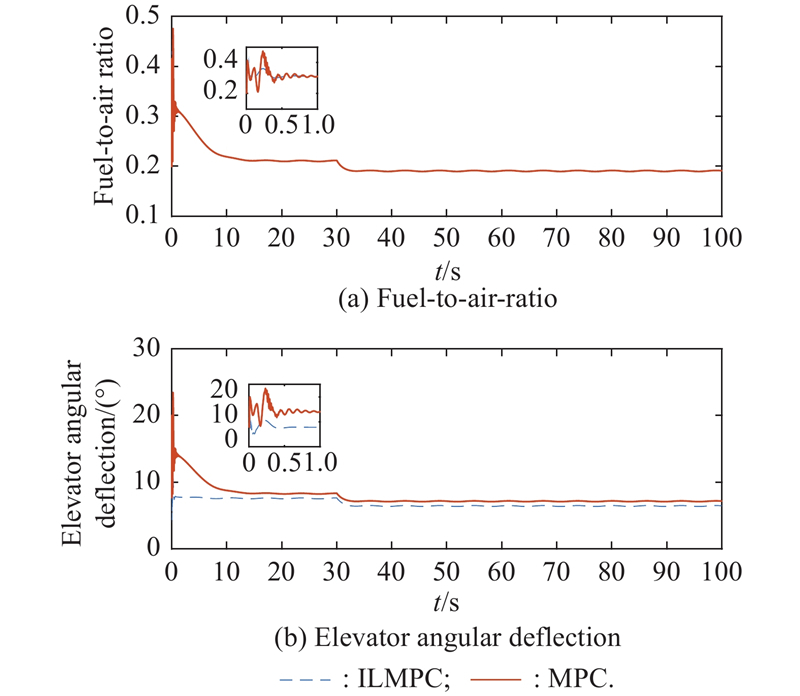
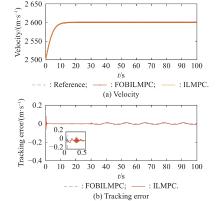
Fig 6
Velocity tracking of ILMPC and FOBILMPC"
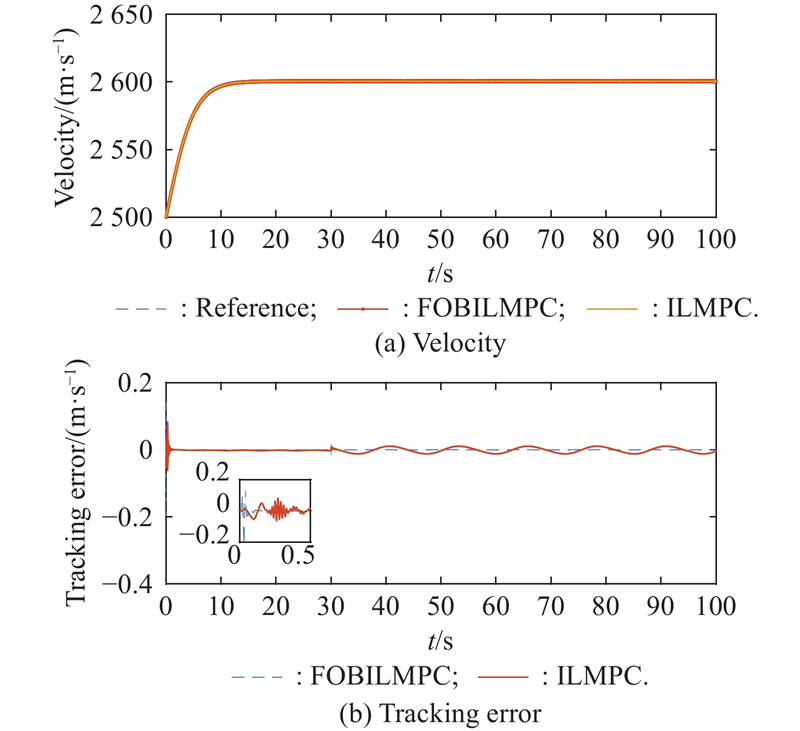
Fig 7
Altitude tracking by ILMPC and FOBILMPC"
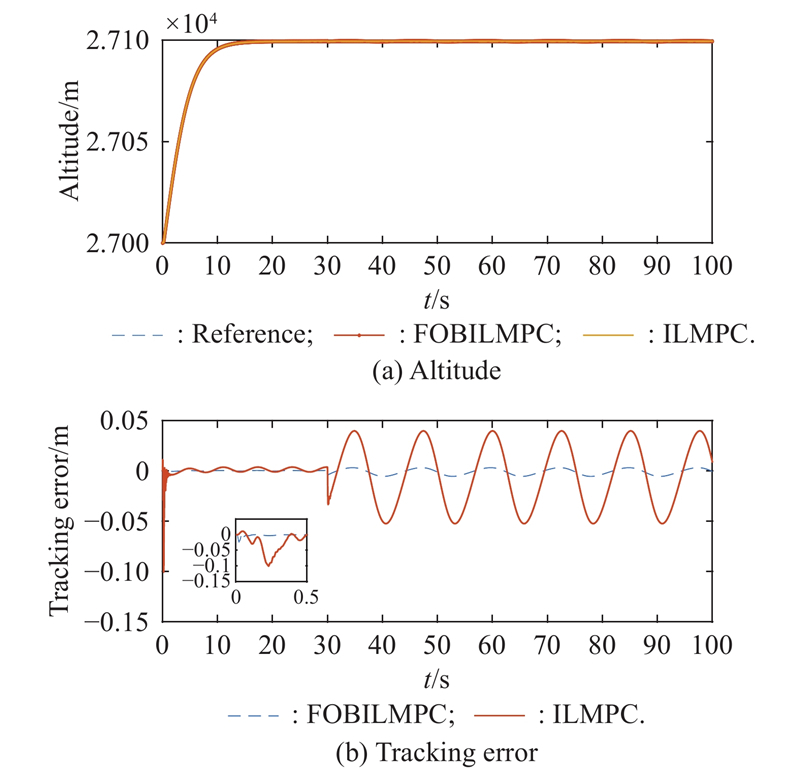
Fig 8
Angle changes of ILMPC and FOBILMPC"
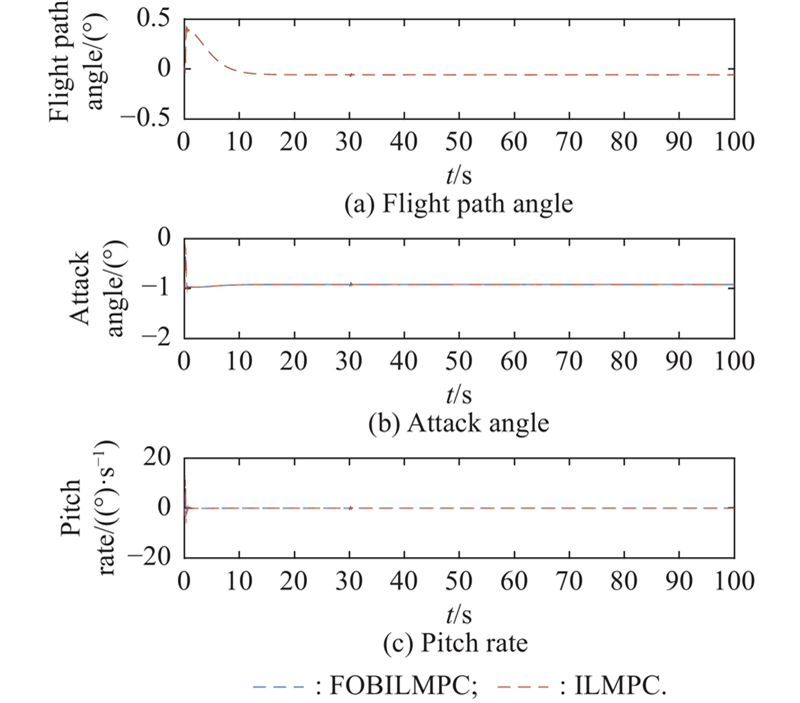
Fig 9
Control inputs for ILMPC and FOBILMPC"
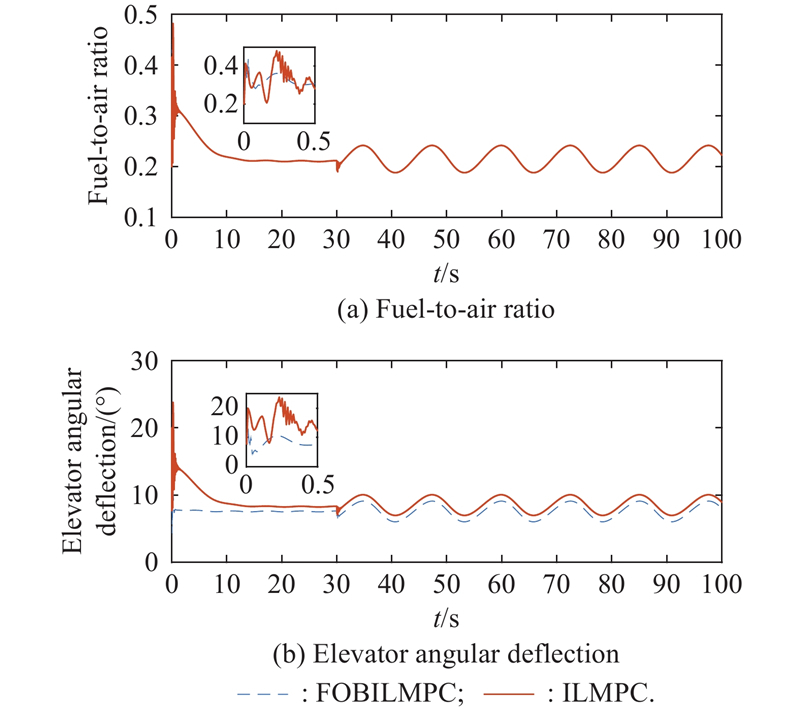
Fig 10
Fault estimation of the fuel-to-air ratio"
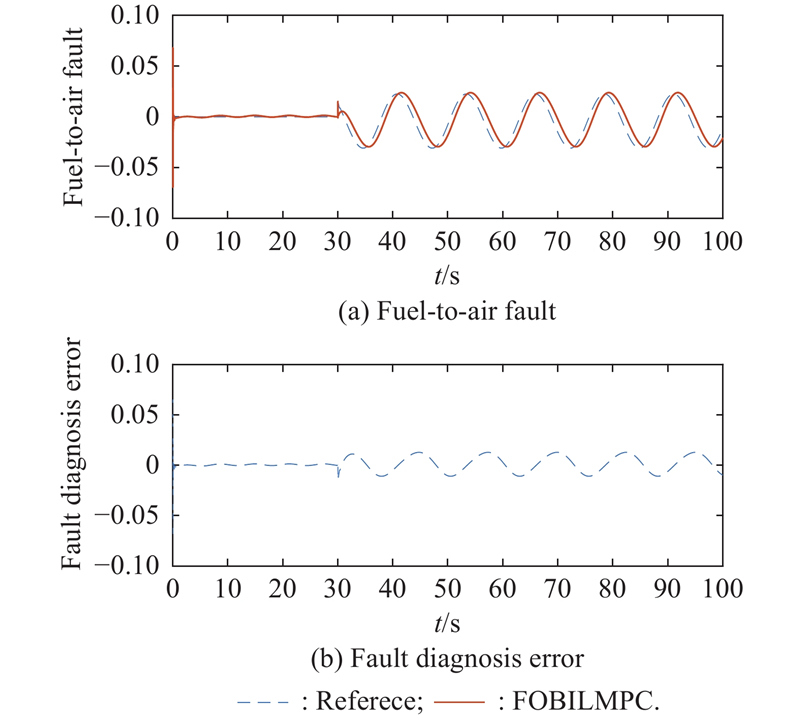
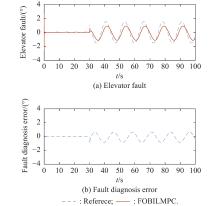
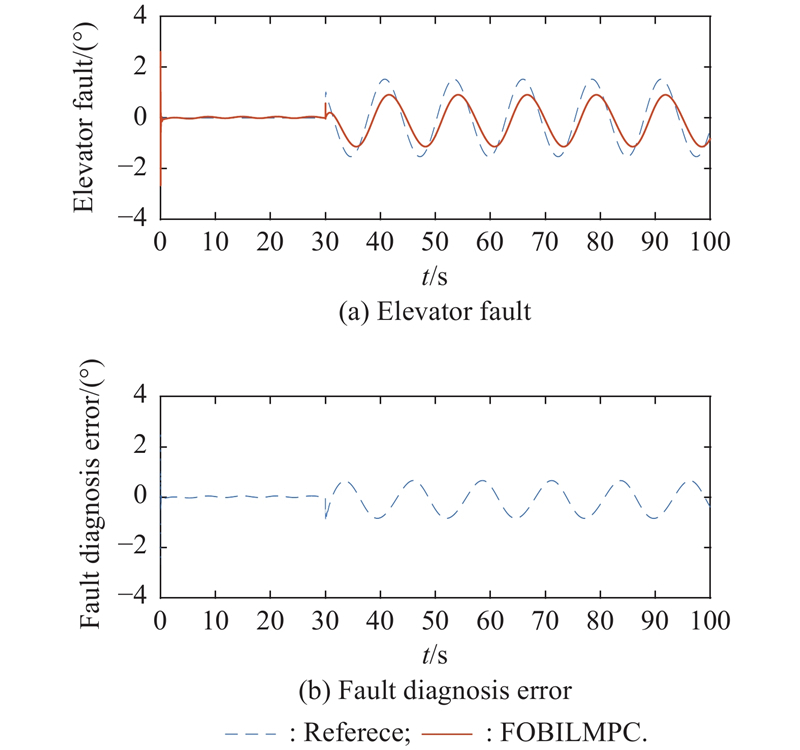
Fig 11
Fault estimation of the elevator"
| 1 | DING Y B, YUE X , CHEN G , et al. Review of control and guidance technology on hypersonic vehicle. Chinese Journal of Aeronautics, 2022, 35(7): 1−18. |
| 2 | AN H , WU Q Q, WANG G , et al Simplified longitudinal control of air-breathing hypersonic vehicles with hybrid actuators. Aerospace Science and Technology, 2020, 104, 105936. |
| 3 |
PARKER J T, SERRANI A, YURKOVICH S, et al Control-oriented modeling of an air-breathing hypersonic vehicle. Journal of Guidance Control and Dynamics, 2007, 30 (3): 856- 869.
doi: 10.2514/1.27830 |
| 4 |
WANG X, XU B Robust adaptive control of hypersonic flight vehicle with aero-servo-elastic effect. IEEE Trans. on Aerospace and Electronic Systems, 2023, 59 (2): 1955- 1964.
doi: 10.1109/TAES.2022.3210153 |
| 5 | SUN J L, PU Z Q, CHANG Y F, et al Appointed-time control for flexible hypersonic vehicles with conditional disturbance negation. IEEE Trans. on Aerospace and Electronic Systems, 2023, 59 (5): 6327- 6345. |
| 6 |
HU G, GUO J, CIESLAK J, et al ADP-based intelligent tracking algorithm for reentry vehicles subjected to model and state uncertainties. IEEE Trans. on Industrial Informatics, 2023, 19 (4): 6047- 6055.
doi: 10.1109/TII.2022.3171327 |
| 7 | ASLAM M S, TIWARI P, PANDEY H M, et al Robust stability analysis for class of Takagi-Sugeno (T-S) fuzzy with stochastic process for sustainable hypersonic vehicles. Information Sciences, 2023, 641, 119044. |
| 8 |
LIU L, LIU Y X, ZHOU L L, et al Cascade ADRC with neural network-based ESO for hypersonic vehicle. Journal of the Franklin Institute, 2023, 360 (12): 9115- 9138.
doi: 10.1016/j.jfranklin.2022.09.019 |
| 9 | ZHANG H, WANG P, TANG G J, et al Fixed-time sliding mode control for hypersonic morphing vehicles via event-triggering mechanism. Aerospace Science and Technology, 2023, 140, 108458. |
| 10 | GUO R Y, DING Y B, YUE X K, et al Active adaptive continuous nonsingular terminal sliding mode controller for hypersonic vehicle. Aerospace Science and Technology, 2023, 137, 108279. |
| 11 | BU X W, JIANG B X, FENG Y A, et al. Hypersonic tracking control under actuator saturations via readjusting prescribed performance functions. ISA Transactions, 2023, 134: 74−85. |
| 12 | CUI P, GAO C S, JING W X, et al Fault-tolerant control of hypersonic vehicle using neural network and sliding mode. International Journal of Aerospace Engineering, 2022, 1, 1637305. |
| 13 |
SHI L, WANG X S, CHENG Y H, et al Safe reinforcement learning-based robust approximate optimal control for hypersonic flight vehicles. IEEE Trans. on Vehicular Technology, 2023, 72 (9): 11401- 11414.
doi: 10.1109/TVT.2023.3264243 |
| 14 |
YANG J, ZHAO Z H, LI S H, et al Composite predictive flight control for airbreathing hypersonic vehicles. International Journal of Control, 2014, 87 (9): 1970- 1984.
doi: 10.1080/00207179.2014.896477 |
| 15 | SONG J M, CAI G H, CHEN X X, et al. Control allocation based command tracking-control system for hypersonic reentry vehicle driven by hybrid effecters. Journal of Aerospace Engineering, 2018, 31(4): 04018031. |
| 16 | MA Y, CAI Y L. Scheduled composite off-line output feed back model predictive control for a constrained hypersonic vehicle using polyhedral invariant sets. Journal of Aerospace Engineering, 2018, 31(4): 04018035. |
| 17 |
QIN W W, HE B, LIU G, et al Robust model predictive tracking control of hypersonic vehicles in the presence of actuator constraints and input delays. Journal of the Franklin Institute, 2016, 353 (17): 4351- 4367.
doi: 10.1016/j.jfranklin.2016.08.007 |
| 18 | ZHANG Z Y, ZENG Q H, WANG A, et al. Model predictive control-based compound control strategy for ducted rockets gas flow with anti-regulation suppression. Proceedings of the Institution of Mechanical Engineers, Part G: Journal of Aerospace Engineering, 2023, 237(10): 2284−2296. |
| 19 | LIU K, ZHOU Z, SHE Z Y, et al Reentry attitude tracking control for hypersonic vehicle with reaction control systems via improved model predictive control approach. Computer Modeling in Engineering & Sciences, 2020, 122 (1): 131- 148. |
| 20 |
ZHAO J, ZHOU S Y, ZHOU R, et al Distributed time-constrained guidance using nonlinear model predictive control. Nonlinear Dynamics, 2016, 84, 1399- 1416.
doi: 10.1007/s11071-015-2578-z |
| 21 | HU X X, KARIMI H R, WANG L G, et al Model predictive control-based non-linear fault tolerant control for air-breathing hypersonic vehicles. IET Control Theory & Applications, 2014, 8 (13): 1147- 1153. |
| 22 |
HU Q L, MENG Y Adaptive backstepping control for air-breathing hypersonic vehicle with actuator dynamics. Aerospace Science and Technology, 2017, 67, 412- 421.
doi: 10.1016/j.ast.2017.04.022 |
| 23 | YANG X H, LV W J, MI H P, et al Tube-MPC control via notch filter for flexible air-breathing hypersonic vehicle with actuator fault. Mathematical Problems in Engineering, 2022, 2022, 4474884. |
| 24 |
YANG X H, LV W J, HU C F, et al Tube-model predictive control based on sum of squares for hypersonic vehicle with state-dependent input constraints. Transactions of the Institute of Measurement and Control, 2022, 44 (5): 1000- 1013.
doi: 10.1177/01423312211046504 |
| 25 |
HU C F, WEI X F, REN Y L Passive fault-tolerant control based on weighted LPV tube-MPC for air-breathing hypersonic vehicles. International Journal of Control, Automation and Systems, 2019, 17 (8): 1957- 1970.
doi: 10.1007/s12555-018-0594-8 |
| 26 |
WANG G, AN H, GUO Z Y, et al Neural longitudinal control of hypersonic vehicles with constrained aerodynamic surfaces. Proceedings of the Institution of Mechanical Engineers, Part G: Journal of Aerospace Engineering, 2022, 236 (13): 2788- 2802.
doi: 10.1177/09544100211069181 |
| 27 |
WANG Y Q, ZHOU D H, GAO F R Iterative learning model predictive control for multi-phase batch processes. Journal of Process Control, 2008, 18 (6): 543- 557.
doi: 10.1016/j.jprocont.2007.10.014 |
| 28 | LU J Y, CAO Z X, GAO F R Multipoint iterative learning model predictive control. IEEE Trans. on Industrial Electronics, 2018, 66 (8): 6230- 6240. |
| 29 |
PARK B J, OH S K, LEE J M Stochastic iterative learning model predictive control based on stochastic approximation. IFAC-PapersOnLine, 2019, 52 (1): 604- 609.
doi: 10.1016/j.ifacol.2019.06.129 |
| 30 |
WU W J, LIU Q, LIU X, et al Data-driven iterative learning predictive control for power converters. IEEE Trans. on Power Electronics, 2022, 37 (12): 14028- 14033.
doi: 10.1109/TPEL.2022.3194518 |
| 31 |
JIANG G Y, HOU Z S Iterative learning model predictive control approaches for trajectory based aircraft operation with controlled time of arrival. International Journal of Control, Automation and Systems, 2020, 18 (10): 2641- 2649.
doi: 10.1007/s12555-019-0590-7 |
| 32 | AHMADI K, ASADI D, MERHEB A, et al Active fault-tolerant control of quadrotor UAVs with nonlinear observer-based sliding mode control validated through hardware in the loop experiments. Control Engineering Practice, 2023, 137, 105557. |
| [1] | Zhengyu YE, Bin JIANG, Yuehua CHENG, Ziquan YU, Yang YANG. Distributed fault diagnosis observer for multi-agent system against actuator and sensor faults [J]. Journal of Systems Engineering and Electronics, 2023, 34(3): 766-774. |
| [2] | Yajie MA, Bin JIANG, Hao REN. Minimum eigenvalue based adaptive fault compensation for hypersonic vehicles [J]. Journal of Systems Engineering and Electronics, 2023, 34(2): 492-500. |
| [3] | Defeng HE, Jie LUO, Di LIN, Shiming YU. Flexible predictive power-split control for battery-supercapacitor systems of electric vehicles using IVHS [J]. Journal of Systems Engineering and Electronics, 2023, 34(1): 224-235. |
| [4] | Fan WANG, Pengfei FAN, Yonghua FAN, Bin XU, Jie YAN. Robust adaptive control of hypersonic vehicle considering inlet unstart [J]. Journal of Systems Engineering and Electronics, 2022, 33(1): 188-196. |
| [5] | Ziquan YU, Youmin ZHANG, Bin JIANG. PID-type fault-tolerant prescribed performance control of fixed-wing UAV [J]. Journal of Systems Engineering and Electronics, 2021, 32(5): 1053-1061. |
| [6] | Fan LI, Jiajun XIONG, Xuhui LAN, Hongkui BI, Xin CHEN. NSHV trajectory prediction algorithm based on aerodynamic acceleration EMD decomposition [J]. Journal of Systems Engineering and Electronics, 2021, 32(1): 103-117. |
| [7] | FARAJZADEH-DEVIN Mohammad-Ghassem, HOSSEINI SANI Seyed Kamal. Enhanced two-loop model predictive control design for linear uncertain systems [J]. Journal of Systems Engineering and Electronics, 2021, 32(1): 220-227. |
| [8] | Guangbin CAI, Yushan ZHAO, Yang ZHAO, Changhua HU. Consensus of multi-vehicle cooperative attack with stochastic multi-hop time-varying delay and actuator fault [J]. Journal of Systems Engineering and Electronics, 2021, 32(1): 228-242. |
| [9] | Hewei ZHAO, Rui LI. Typical adaptive neural control for hypersonic vehicle based on higher-order filters [J]. Journal of Systems Engineering and Electronics, 2020, 31(5): 1031-1040. |
| [10] | Yao LU, You SUN, Xiaodong LIU, Bo GAO. Control allocation for a class of morphing aircraft with integer constraints based on Lévy flight [J]. Journal of Systems Engineering and Electronics, 2020, 31(4): 826-840. |
| [11] | Tianyi LAN, Hui LIN, Bingqiang LI. Kernel-based auto-associative P-type iterative learning control strategy [J]. Journal of Systems Engineering and Electronics, 2020, 31(2): 383-392. |
| [12] | Chaofang Hu, Yue Xin, and Hao Feng. Multi-objective reentry trajectory optimization method via GVD for hypersonic vehicles [J]. Systems Engineering and Electronics, 2017, 28(4): 732-. |
| [13] | Xuzi Wu, Zheng Liu, and Rong Xie. Clutter suppression for hypersonic vehicle-borne radar with frequency diverse array [J]. Journal of Systems Engineering and Electronics, 2017, 28(3): 481-492. |
| [14] | Kun Zhang and Xiaoguang Gao. Distributed tracking control of unmanned aerial vehicles under wind disturbance and model uncertainty [J]. Journal of Systems Engineering and Electronics, 2016, 27(6): 1262-1271. |
| [15] | Lu Wang, Qinghua Xing, and Yifan Mao. Reentry trajectory rapid optimization for hypersonic vehicle satisfying waypoint and no-fly zone constraints [J]. Systems Engineering and Electronics, 2015, 26(6): 1277-1290. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||