
Journal of Systems Engineering and Electronics ›› 2025, Vol. 36 ›› Issue (6): 1665-1678.doi: 10.23919/JSEE.2025.000116
• CONTROL THEORY AND APPLICATION • Previous Articles
Yuanqing XIA1( ), Zhongqi SUN1,*(), Li DAI1(), Yufeng ZHAN1(), Dihua ZHAI1(), Wenjun ZHAO1(), Fan PU2()
), Zhongqi SUN1,*(), Li DAI1(), Yufeng ZHAN1(), Dihua ZHAI1(), Wenjun ZHAO1(), Fan PU2()
Received:2024-07-08
Online:2025-12-18
Published:2026-01-07
Contact:
Zhongqi SUN
E-mail:xia_yuanqing@bit.edu.cn;zhongqisun@bit.edu.cn;li.dai@bit.edu.cn;yu-feng.zhan@bit.edu.cn;zhaidih@bit.edu.cn;18829898128@163.com;pufanv23@gmail.com
About author:Supported by:Yuanqing XIA, Zhongqi SUN, Li DAI, Yufeng ZHAN, Dihua ZHAI, Wenjun ZHAO, Fan PU. Differential flatness ADRC for high-speed steering of tracked tank systems[J]. Journal of Systems Engineering and Electronics, 2025, 36(6): 1665-1678.
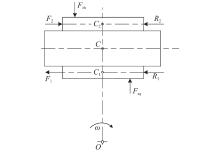
Fig 1
Force analysis of a tracked tank steering at low and uniform speed"
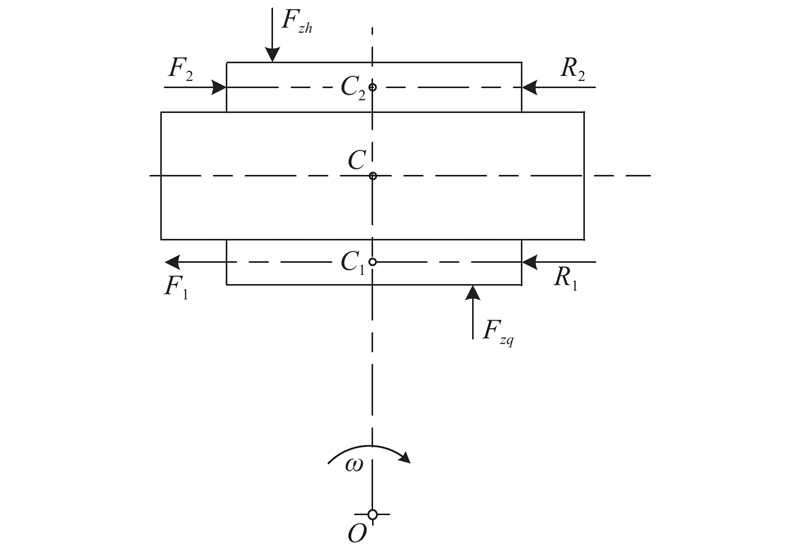
Fig 2
Steering resistance of tracked tank during steering"
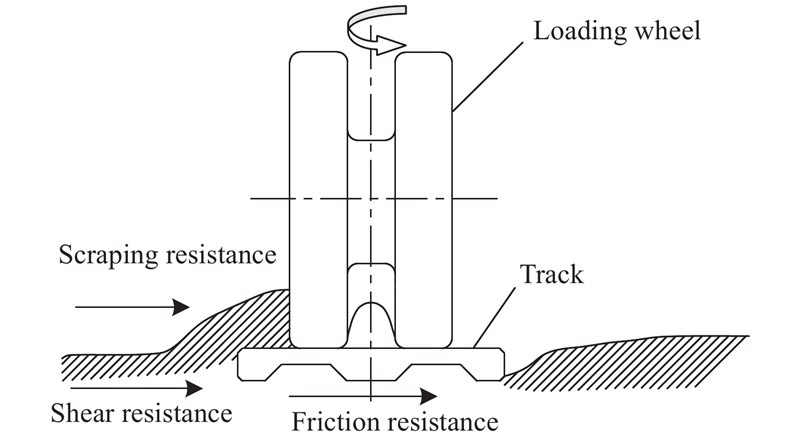
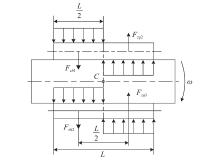
Fig 3
Steering resistance distribution"
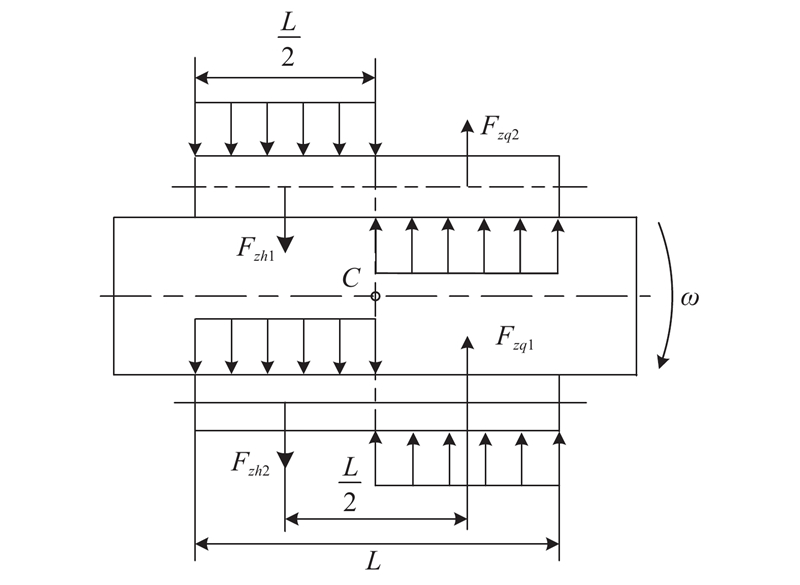
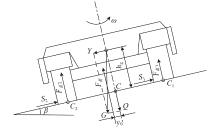
Fig 4
Gravity decomposition and pressure center offset diagram"
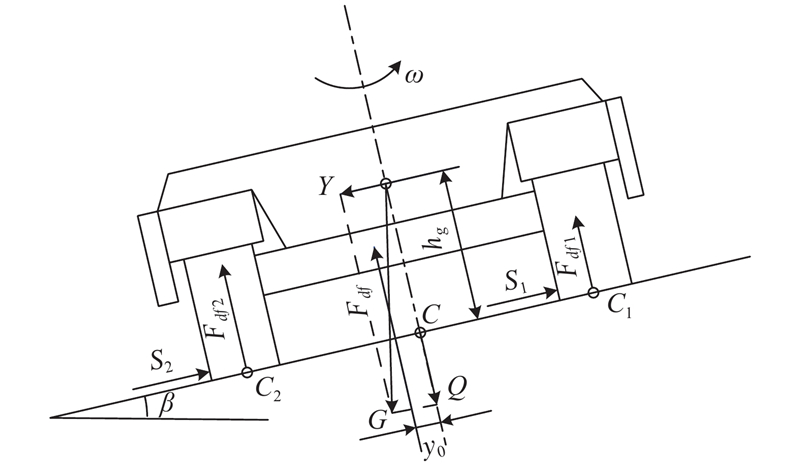
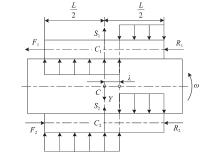
Fig 5
Distribution of lateral resistance"
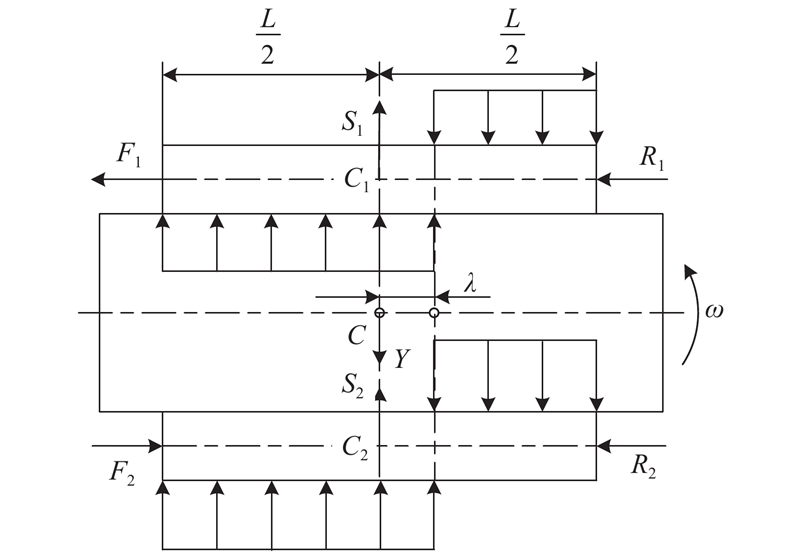
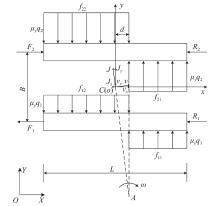
Fig 6
Force diagram of the tracked tank during steering at high speed"
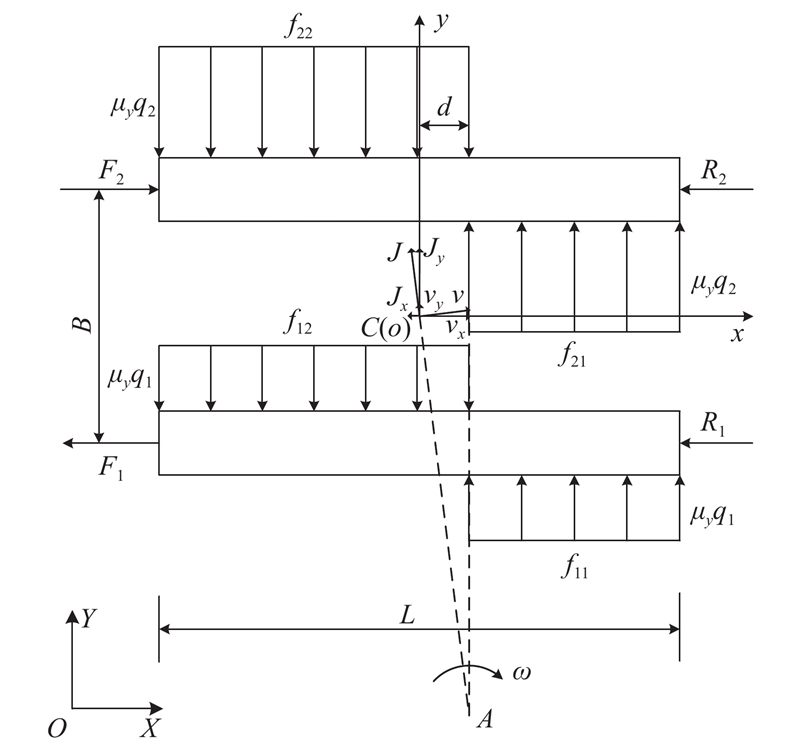
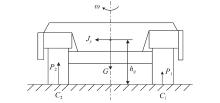
Fig 7
Influence of centrifugal force on tank steering"
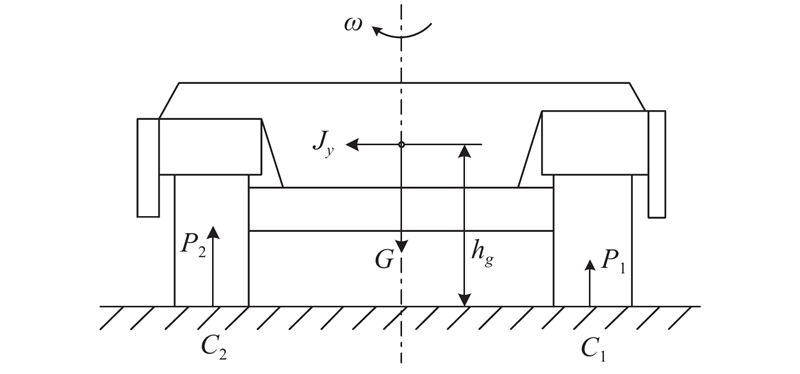
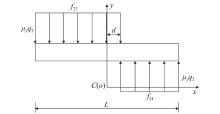
Fig 8
Steering resistance of outer track"
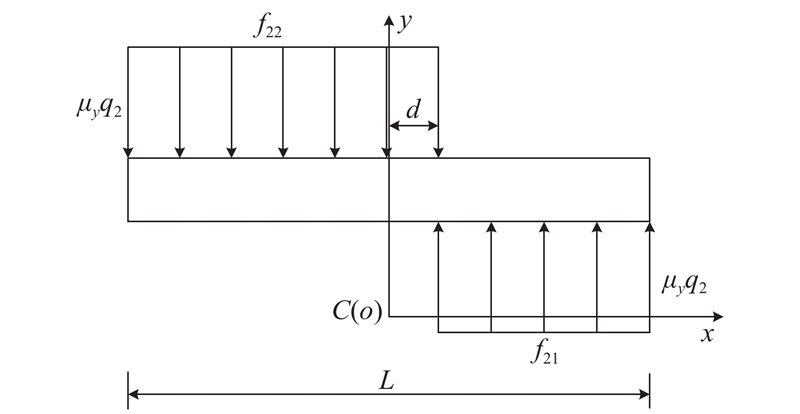

Fig 9
Dual-channel ADRC controller for flat systems"
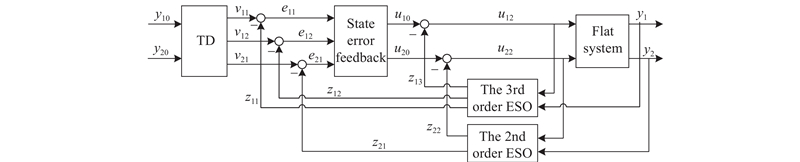
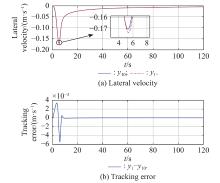
Fig 10
Lateral velocity tracking results"
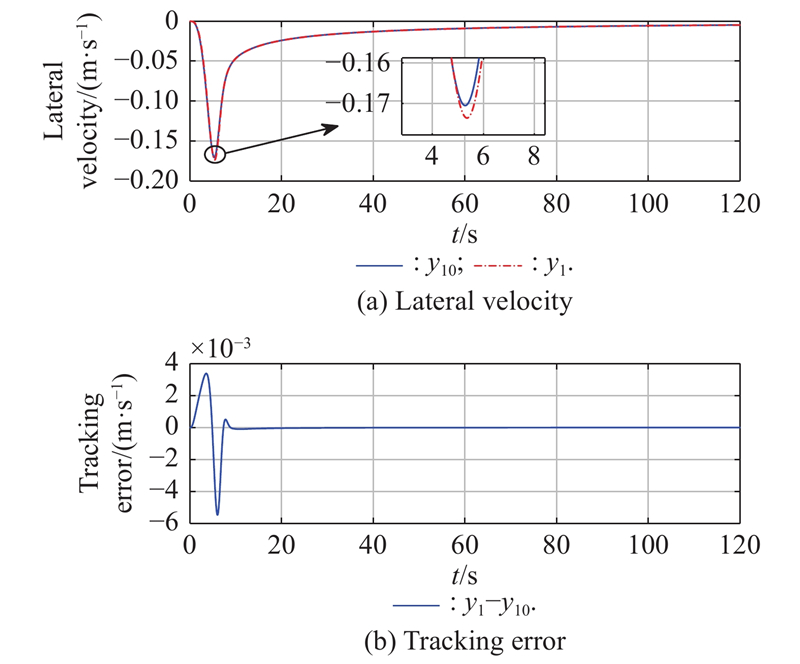
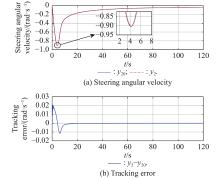
Fig 11
Steering angular velocity tracking results"
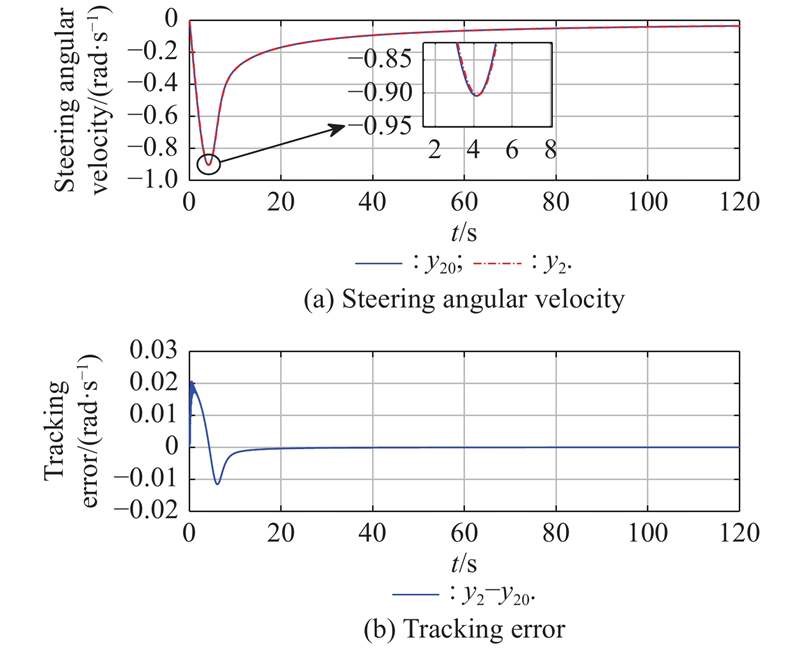
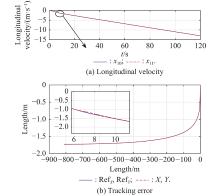
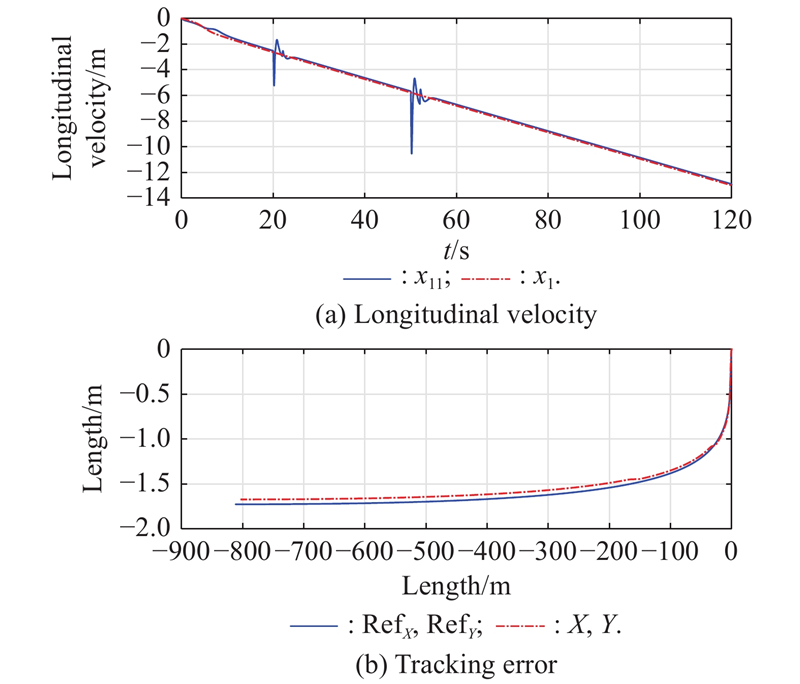
Fig 12
Longitudinal velocity and track tracking results"
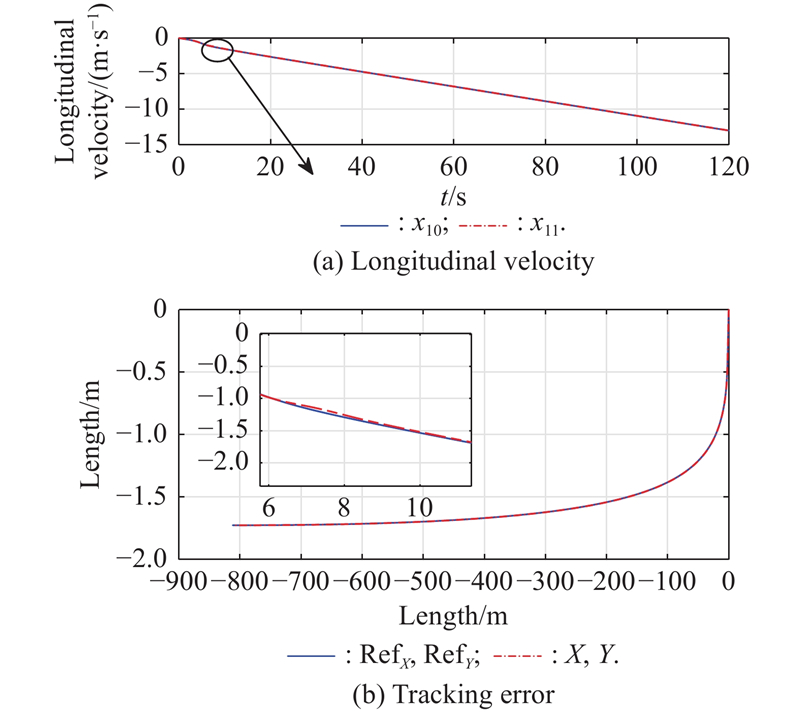

Fig 13
Observation results of ESO in channel 1"
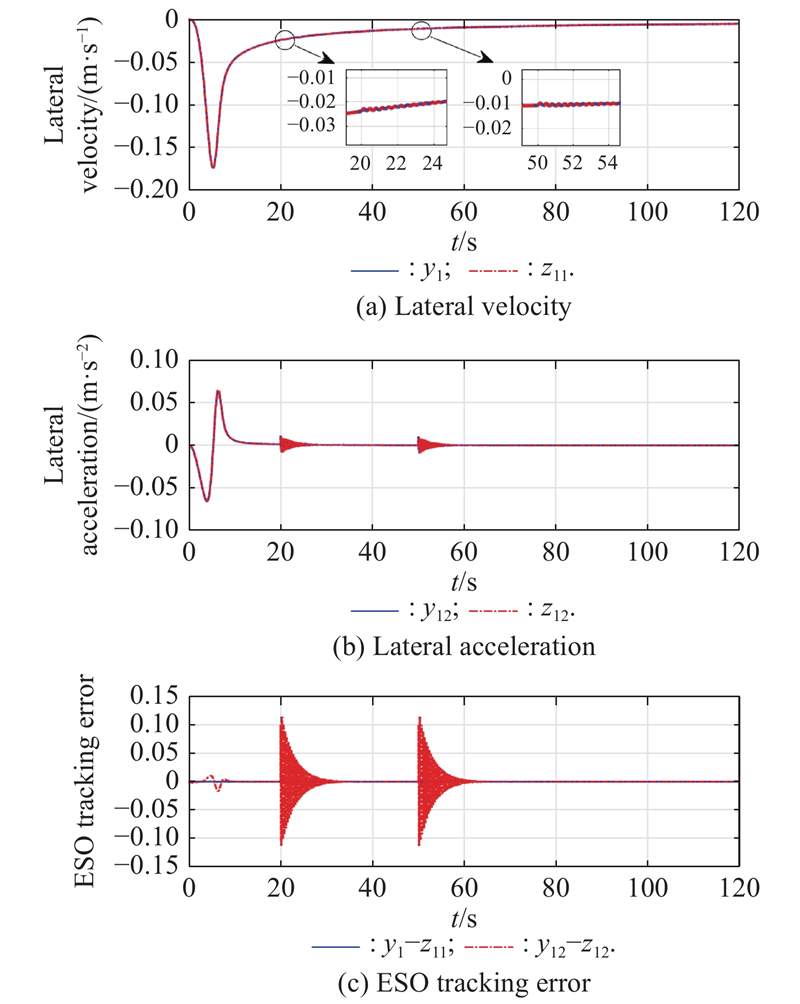
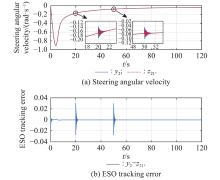
Fig 14
Observation results of ESO in channel 2"
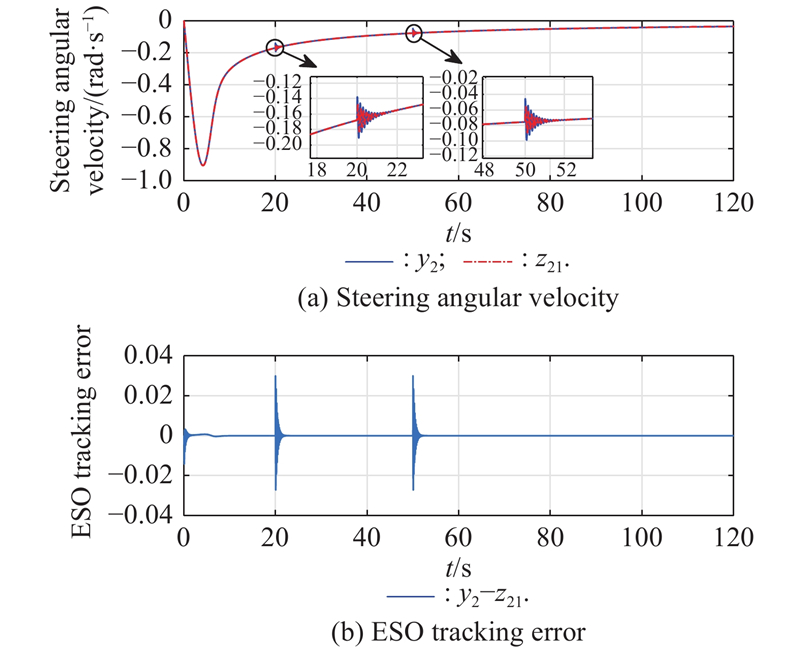
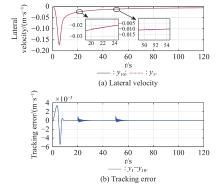
Fig 15
Lateral velocity tracking performance under external disturbances"
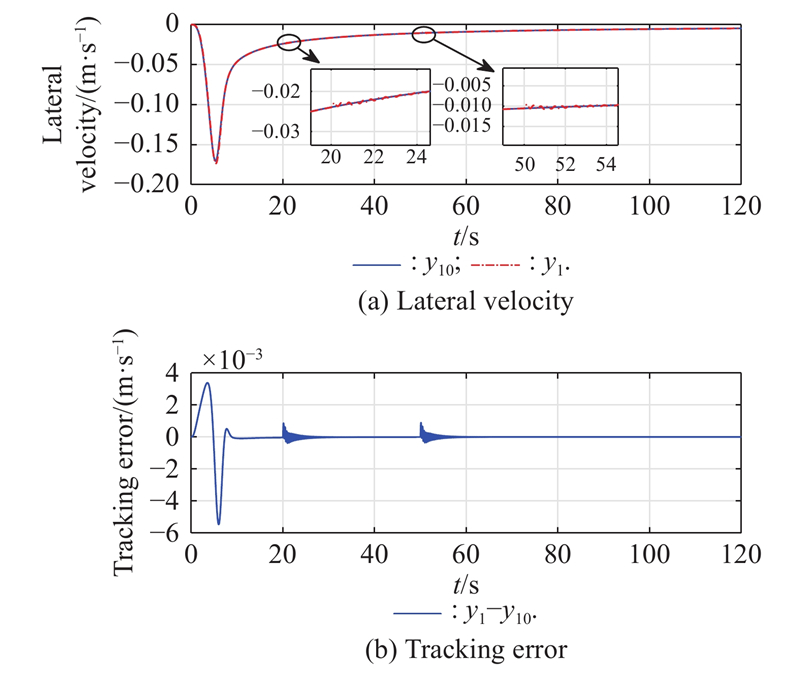
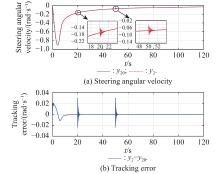
Fig 16
Steering angular velocity tracking results performance under external disturbances"
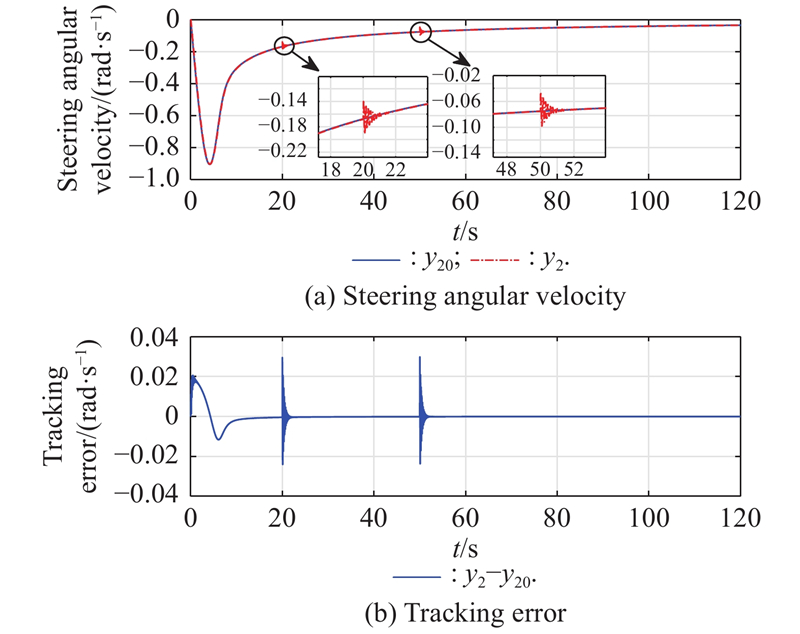
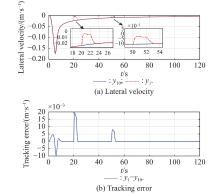
Fig 17
Lateral velocity tracking results with PID"
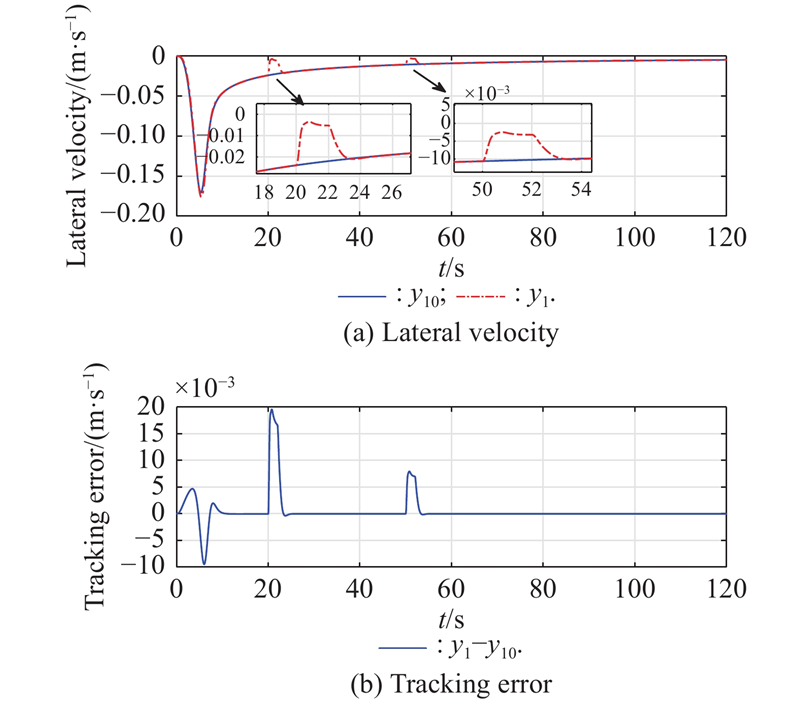
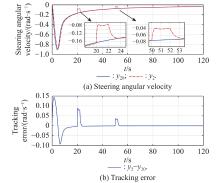
Fig 18
Steering angular velocity tracking results with PID"
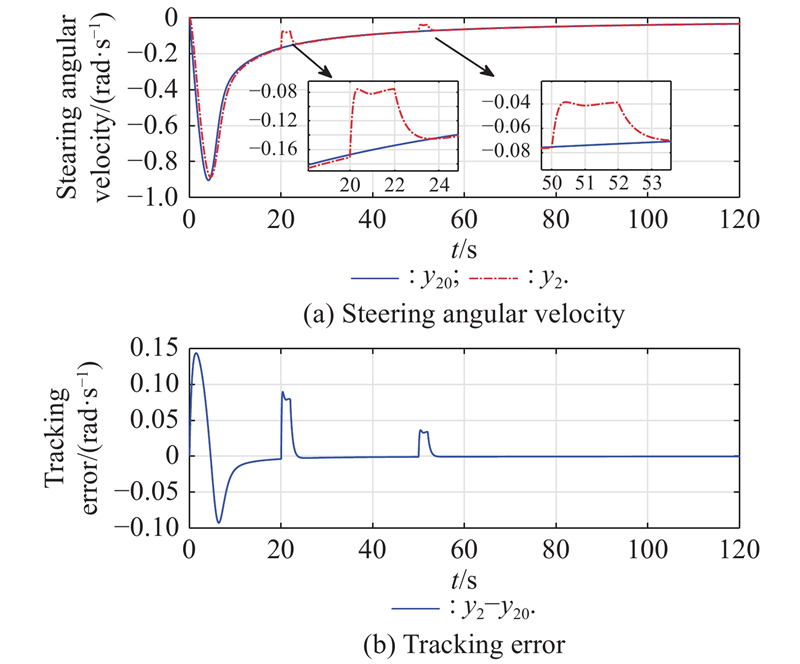
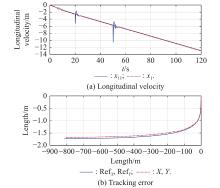
Fig 19
Longitudinal velocity and tracking results with PID"
| 1 | YAN Q D, ZHANG L D, ZHAO Y Q. Tank structure and design. Beijing: Beijing University of Technology Press, 2007. (in Chinese) |
| 2 | YANG L K, XU J G Analysis on the development of active protection system for tanks and armored vehicles. Journal of Physics: Conference Series, 2021, 1855 (1): 012034. |
| 3 | WONG J Y. Theory of ground vehicles. 4th ed. New Jersey: Wiley, 2008. |
| 4 | ZHANG Y, QIU M H, LIU X X, et al Research on characteristics of tracked vehicle steering on slope. Mathematical Problems in Engineering, 2021, 2021 (1): 3592902. |
| 5 | CHENG J W, GAO L H, WANG H Y, et al Steering analysis of tracked vehicles. Journal of Military Engineering, 2007, 28 (9): 1110- 1115. |
| 6 | LIU K, AYERS P, HOWARD H, et al Multi-pass rutting study for turning wheeled and tracked vehicles. Transactions of the ASABE, 2011, 54 (1): 5- 12. |
| 7 | HUANG H, LI Z, WANG Z D A power coupling system for electric tracked vehicles during high-speed steering with optimization-based torque distribution control. Energie, 2018, 11 (6): 1538. |
| 8 | ALHIMDANI F F Steering analysis of articulated tracked vehicles. Journal of Terramechanics, 1982, 19 (3): 195- 209. |
| 9 | BEKKER M G. Theory of land locomotion. Ann Arbor: The University of Michigan Press, 1956. |
| 10 | KOZŁOWSKI K, PAZDERSKI D Modeling and control of a 4-wheel skid-steering mobile robot. International Journal of Applied Mathematics and Computer Science, 2004, 14 (4): 477- 496. |
| 11 | WANG H Y, CHEN B, RUI Q, et al Steering analysis of tracked vehicle under concentrated load. Acta Armamentarii, 2006, 37 (12): 2196- 2204. |
| 12 | GALVAGNO E, RONDINELLI E, VELARDOCCHIA M Electro-mechanical transmission modelling for series-hybrid tracked tanks. International Journal of Heavy Vehicle Systems, 2012, 19 (3): 256- 280. |
| 13 | WANG H Y, LI T F, WANG T, et al Analysis and calculation of tracked vehicle steering-load based on conditions of tracks’ slip. Applied Mechanics & Materials, 2018, 378, 55- 60. |
| 14 | MAHALINGAM I, PADMANABHAN C A novel alternate multibody model for the longitudinal and ride dynamics of a tracked vehicle. Vehicle System Dynamics, 2021, 59 (3): 433- 457. |
| 15 | WANG Z X. Research on steering stability control of high-speed electromechanical compound drive tracked vehicles. Beijing: Beijing Institute of Technology, 2017. (in Chinese) |
| 16 | CUI D, WANG G Q, ZHAO H Y, et al Research on a path-tracking control system for articulated tracked vehicles. Strojniski Vestnik-Journal of Mechanical Engineering, 2020, 66 (5): 311- 324. |
| 17 | LIU Z, KANG H Y Research on trajectory tracking of unmanned vehicle based on model predictive control. Journal of Physics Conference Series, 2021, 1861 (1): 012116. |
| 18 | GAI J T, HUANG S D, LIU Y, et al Adaptive sliding mode steering control of double motor coupling drive transmission for tracked vehicle. Acta Armamentarii, 2015, 36 (3): 405- 411. |
| 19 | ZHAO Z Y, LIU H O, CHEN H Y, et al Kinematics-aware model predictive control for autonomous high-speed tracked vehicles under the off-road conditions. Mechanical Systems and Signal Processing, 2019, 123 (15): 333- 350. |
| 20 | TOTA A, VELARDOCCHIA M, ROTA E, et al. Steering behavior of an articulated amphibious all-terrain tracked vehicle. SAE Technical Paper, 2020. DOI:10.4271/2020-01-0996 |
| 21 | HOU W, ZOU T G, MAO F H, et al Dynamics model and analysis of tracked vehicle steering system. Proc. of the 6th International Conference on Intelligent Computing, Communication, and Devices, 2023, 800- 809. |
| 22 | ZHOU B C, CHEN S Y, HU J N, et al Multi-body dynamics modeling and test of an articulated steering half-track tractor. International Journal of Agricultural and Biological Engineering, 2023, 16 (6): 124- 133. |
| 23 | PONORAC L, BLAGOJEVI I Experimental validation of a high-speed tracked vehicle powertrain simulation model. Measurement Science Review, 2023, 23 (5): 192- 201. |
| 24 | YUAN Y, GAI J T, ZENG G, et al Analysis and experimental verification of yaw motion response characteristics of high-speed tracked vehicle. Acta Armamentarii, 2024, 45 (4): 1094- 1107. |
| 25 | ZHANG R Z, ZHOU W, LIU H O, et al. A terramechanics-based dynamic model for motion control of unmanned tracked vehicles. IEEE Trans. on Intelligent Vehicles, 2024. DOI: 10.1109/TIV.2024.3406582. |
| 26 | HOU X Z, MA Y, XIANG C L Design and comparative study of steering controller for tracked vehicle based on disturbance observation. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2024, 238 (13): 4216- 4229. |
| 27 | FLIESS M, LVINE J, MARTIN P, et al Flatness and defect of non-linear systems: introductory theory and examples. Internation Journal of Control, 1995, 61 (6): 1327- 1361. |
| 28 | TANG S X, YUAN S H, HU J B, et al Modeling of steady-state performance of skid-steering for high-speed tracked vehicles. Journal of Terramechanics, 2017, 73, 25- 35. |
| 29 | HAN J Q From PID to active disturbance rejection control. IEEE Trans. on Industrial Electronics, 2009, 56 (3): 900- 906. |
| 30 | ASTROM K J, HAGGLUND T Revisiting the Ziegler–Nichols step response method for PID control. Journal of Process Control, 2004, 14 (6): 635- 650. |
| [1] | Jie LI, Yuanqing XIA. On stability analysis of nonlinear ADRC-based control system with application to inverted pendulum problems [J]. Journal of Systems Engineering and Electronics, 2024, 35(6): 1563-1573. |
| [2] | Junjie LIU, Mingwei SUN, Zengqiang CHEN, Qinglin SUN. High AOA decoupling control for aircraft based on ADRC [J]. Journal of Systems Engineering and Electronics, 2020, 31(2): 393-402. |
| [3] | Yueyue Ma, Jie Guo, and Shengjing Tang. BTT autopilot design for agile missiles with aerodynamic uncertainty [J]. Journal of Systems Engineering and Electronics, 2015, 26(4): 802-. |
| [4] | Ruiguang Yang, Mingwei Sun, and Zengqiang Chen. Active disturbance rejection control on first-order plant [J]. Journal of Systems Engineering and Electronics, 2011, 22(1): 95-102. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||