
Journal of Systems Engineering and Electronics ›› 2021, Vol. 32 ›› Issue (5): 1014-1022.doi: 10.23919/JSEE.2021.000086
• New Developments on FDD and FTC Techniques • Previous Articles Next Articles
Juan Antonio VAZQUEZ TREJO1,2,*( ), Adrien GUENARD3(), Manuel ADAM-MEDINA2(), Jean-Christophe PONSART1(), Laurent CIARLETTA3(), Damiano ROTONDO4(), Didier THEILLIOL1()
), Adrien GUENARD3(), Manuel ADAM-MEDINA2(), Jean-Christophe PONSART1(), Laurent CIARLETTA3(), Damiano ROTONDO4(), Didier THEILLIOL1()
Received:2020-12-24
Online:2021-10-18
Published:2021-11-08
Contact:
Juan Antonio VAZQUEZ TREJO
E-mail:juan-antonio.vazquez-trejo@univ-lorraine.fr;adrien.guenard@loria.fr;manuel.am@cenidet.tecnm.mx;jean-christophe.ponsart@univ-lorraine.fr;laurent.ciarletta@loria.fr;damiano.rotondo@uis.no;didier.theilliol@univ-lorraine.fr
About author:Juan Antonio VAZQUEZ TREJO, Adrien GUENARD, Manuel ADAM-MEDINA, Jean-Christophe PONSART, Laurent CIARLETTA, Damiano ROTONDO, Didier THEILLIOL. Event-triggered leader-following formation control for multi-agent systems under communication faults: application to a fleet of unmanned aerial vehicles[J]. Journal of Systems Engineering and Electronics, 2021, 32(5): 1014-1022.

Fig 1
Bebop 2 parrot"
Table 1
Initial conditions of the UAVs"
| Agent | Position [ | Velocity |
| | [?0.7249, ?0.7232] | [?0.0084, 0.0357] |
| | [0.0330, ?0.3345] | [0.0129, ?0.0107] |
| | [1.5115, 1.0167] | [?0.0239, 0.0082] |
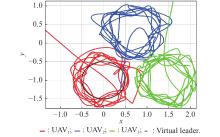
Fig 2
Trajectories of UAVs (classical approach)"
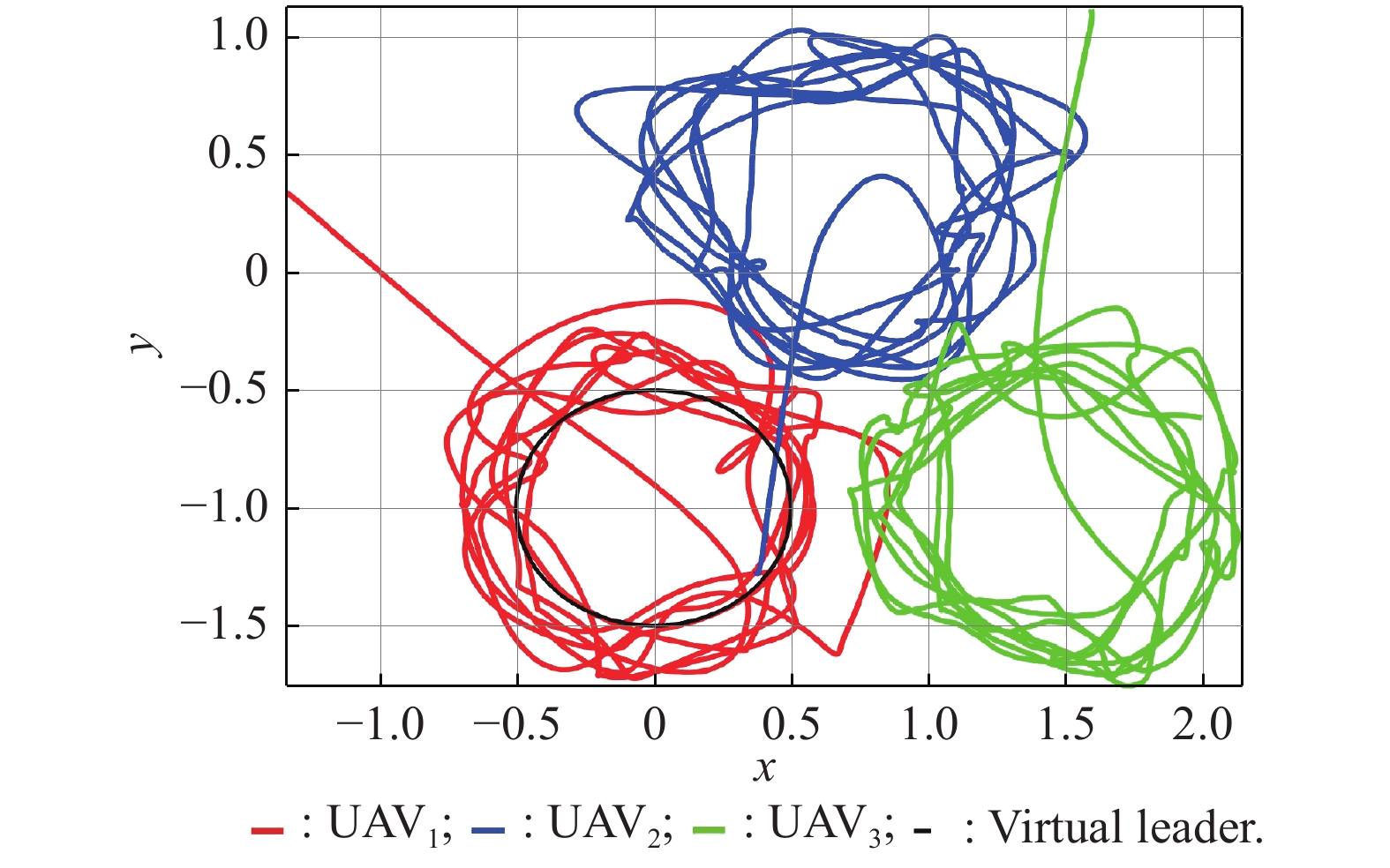
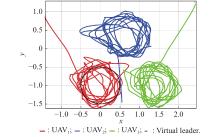
Fig 3
Trajectories of UAVs (proposed time-triggered approach)"
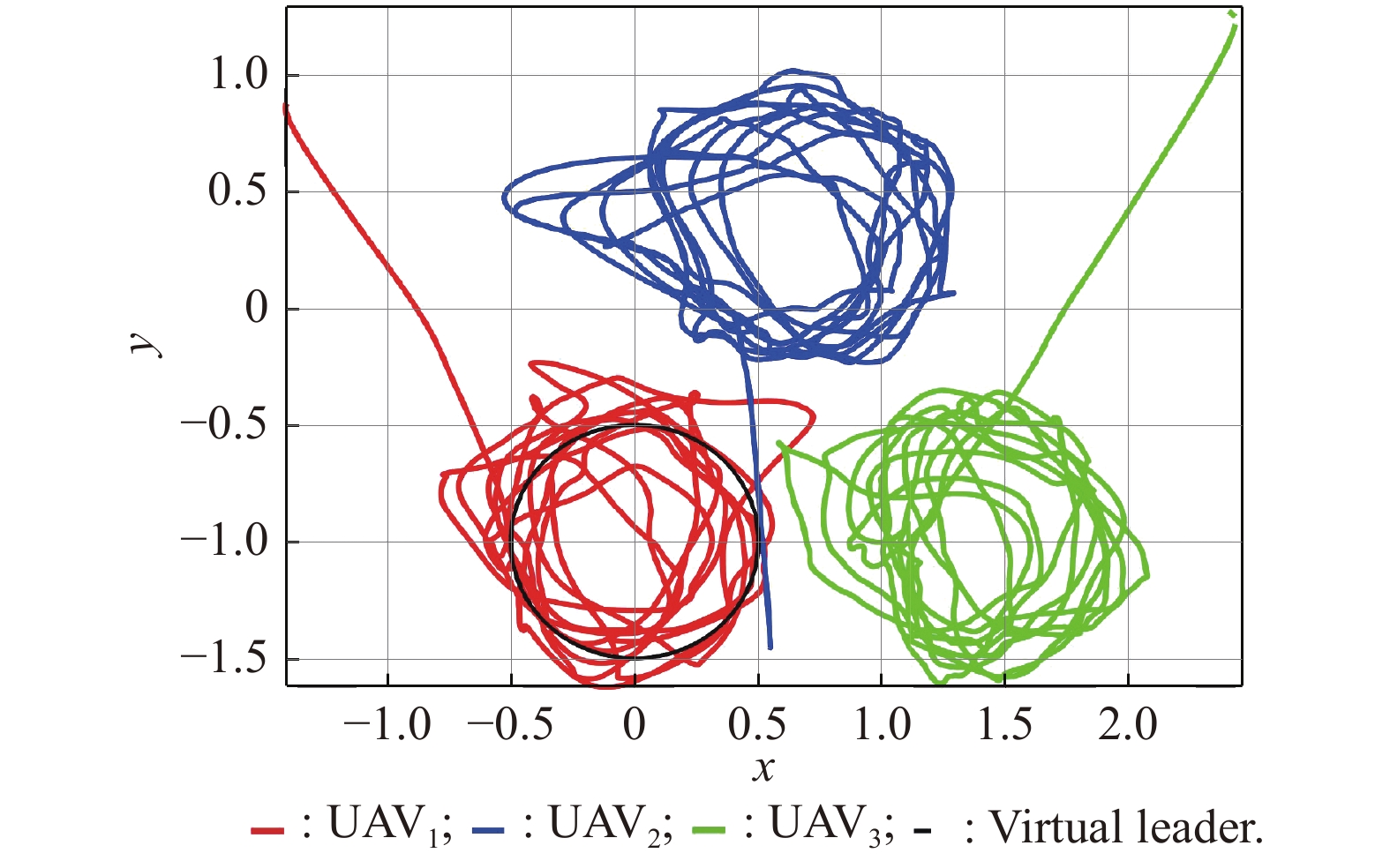
Fig 4
Trajectories of UAVs (proposed event-triggered approach)"
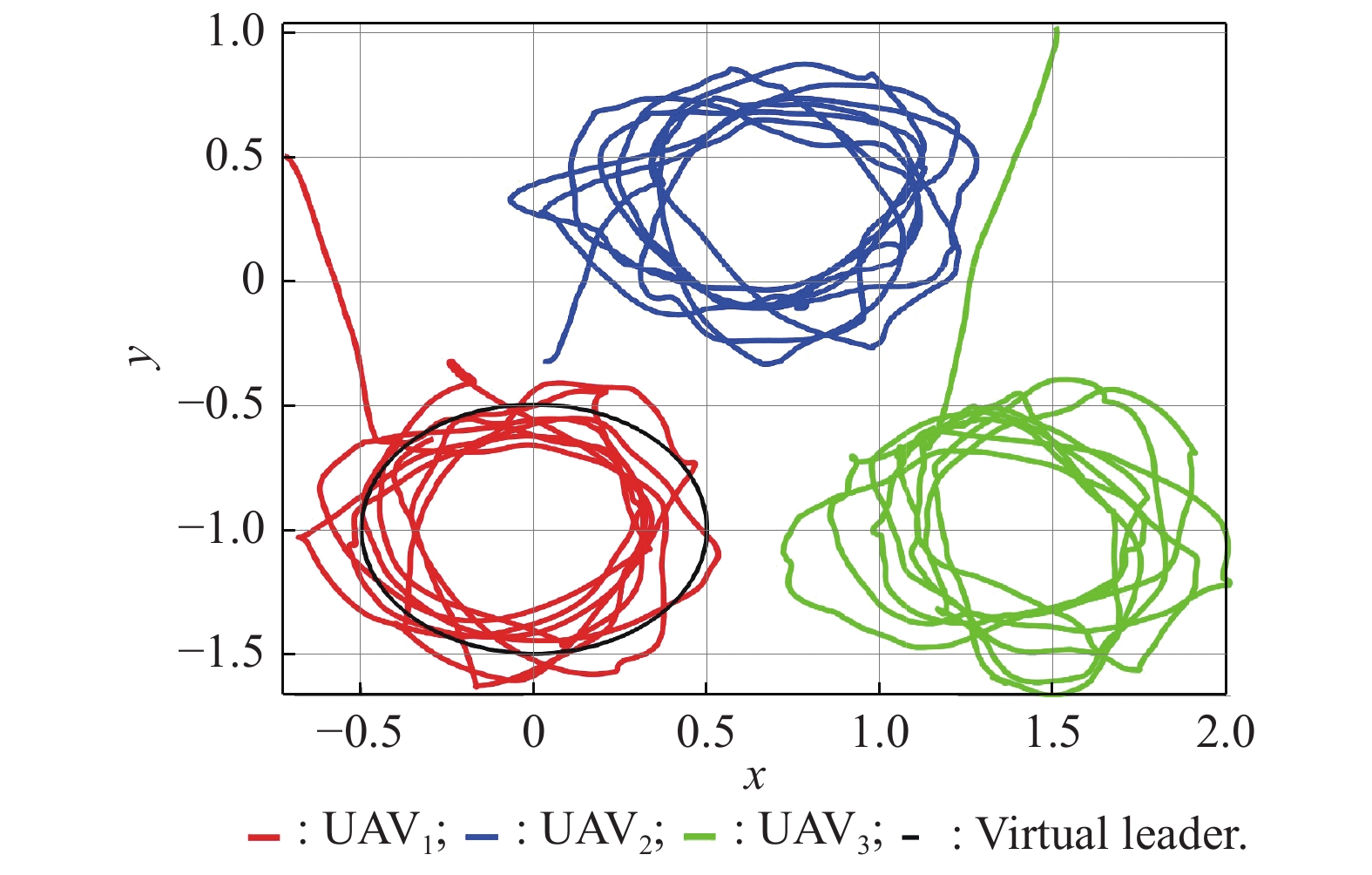
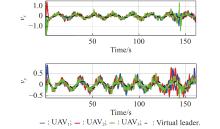
Fig 5
Velocities of UAVs (classical approach)"
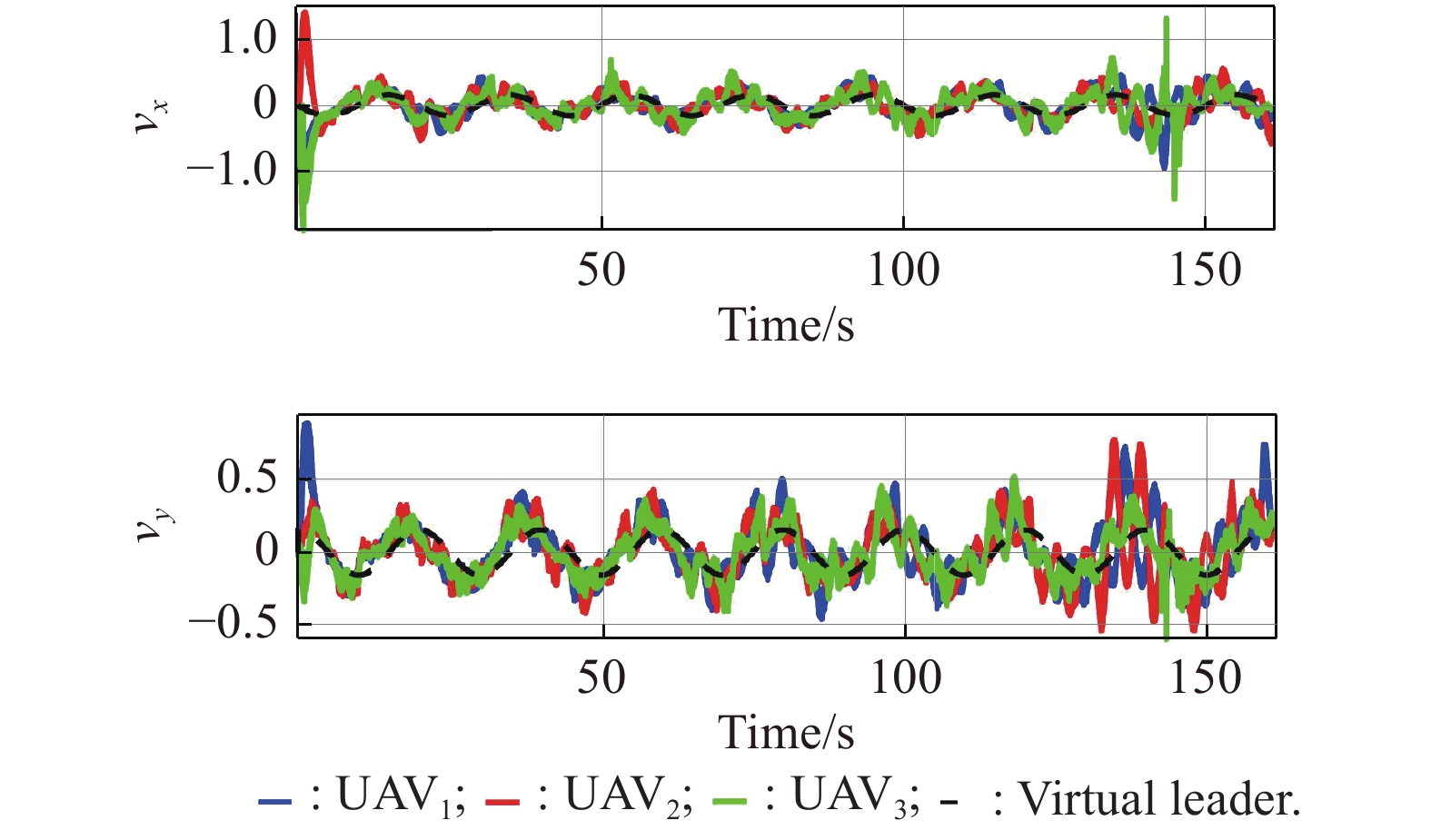
Fig 6
Velocities of UAVs (proposed time-triggered approach)"
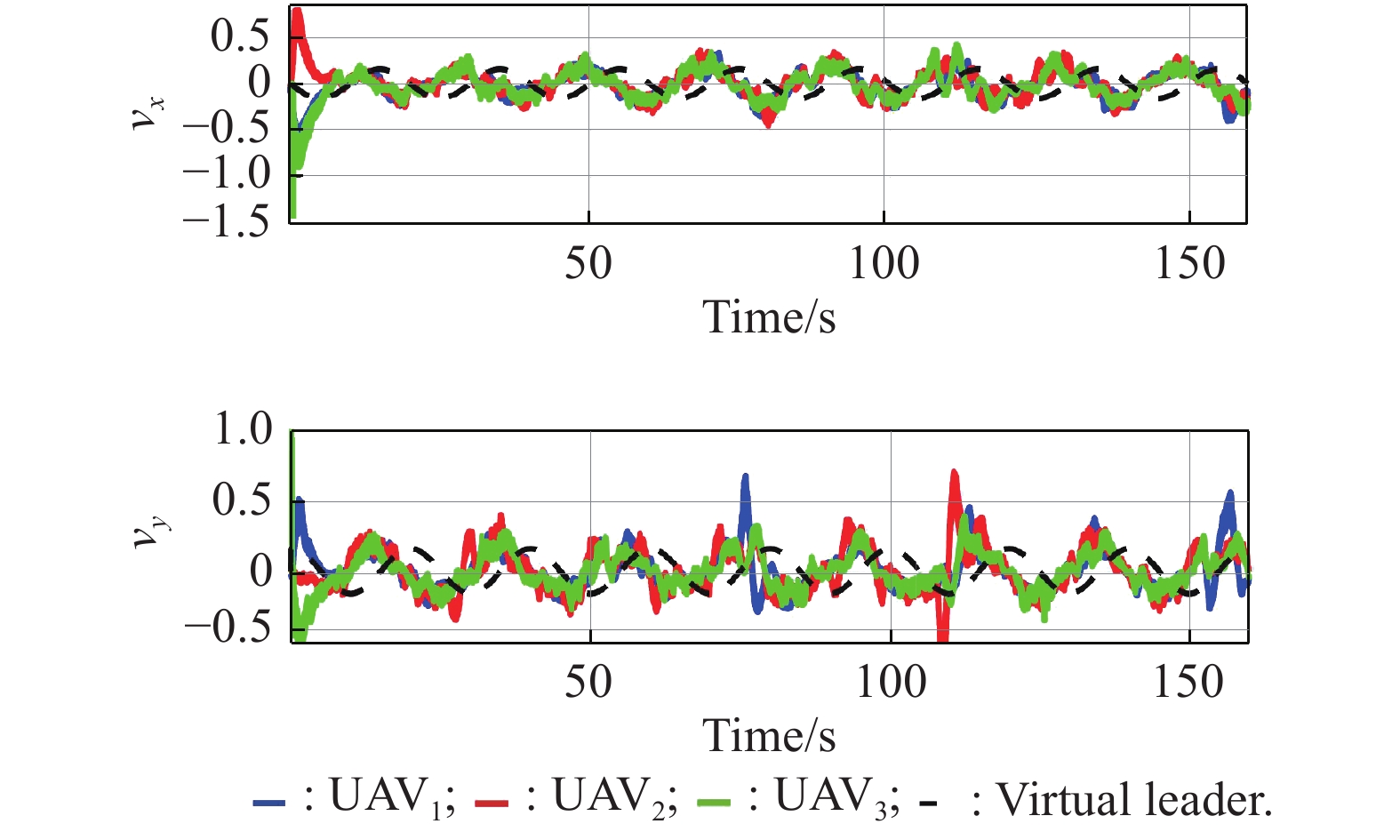
Fig 7
Velocities of UAVs (proposed event-triggered approach)"
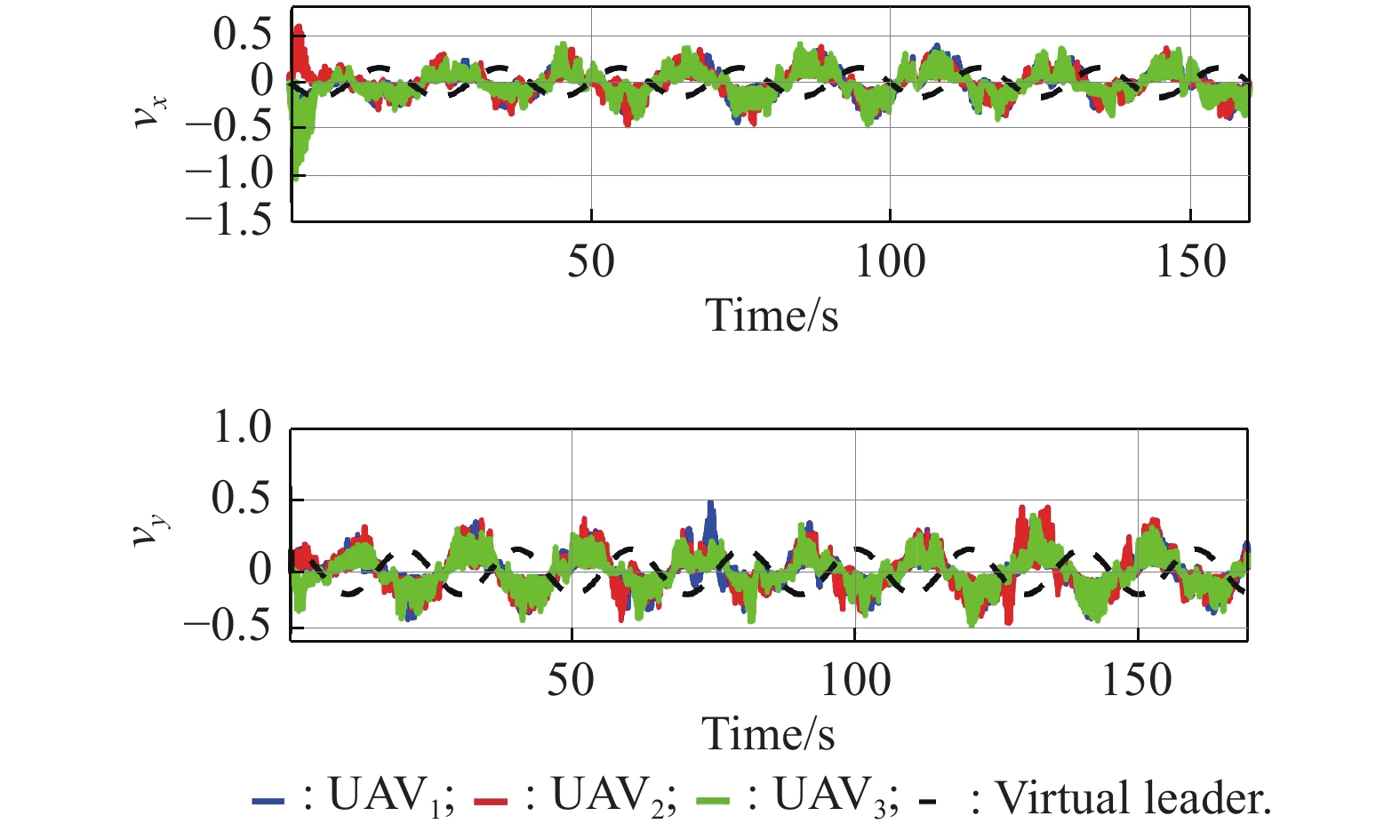
Fig 8
Consensus control law (event-triggered proposed approach)"
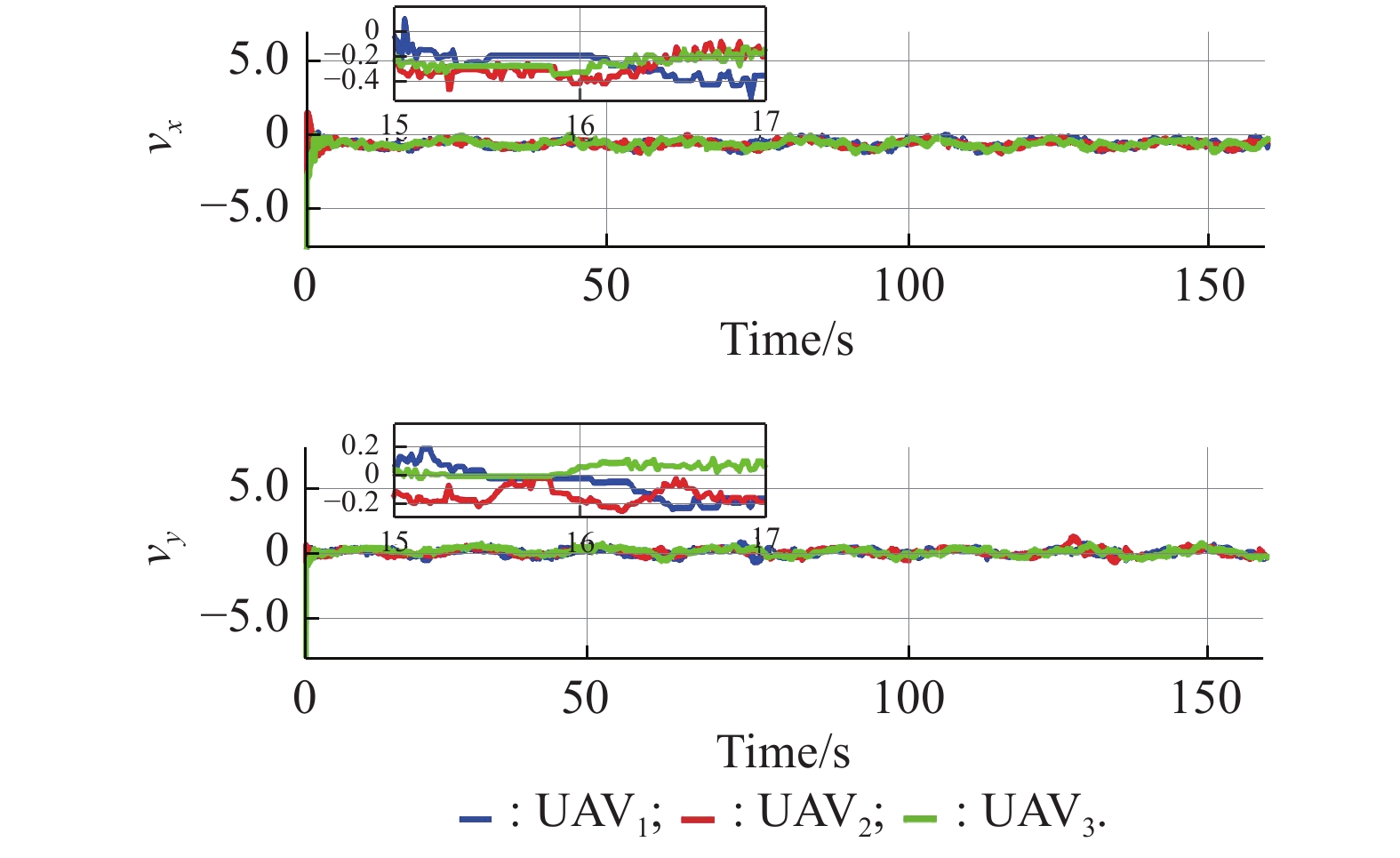
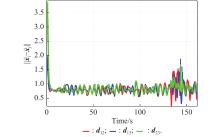
Fig 9
Evaluation of consensus’ performance (classical approach)"
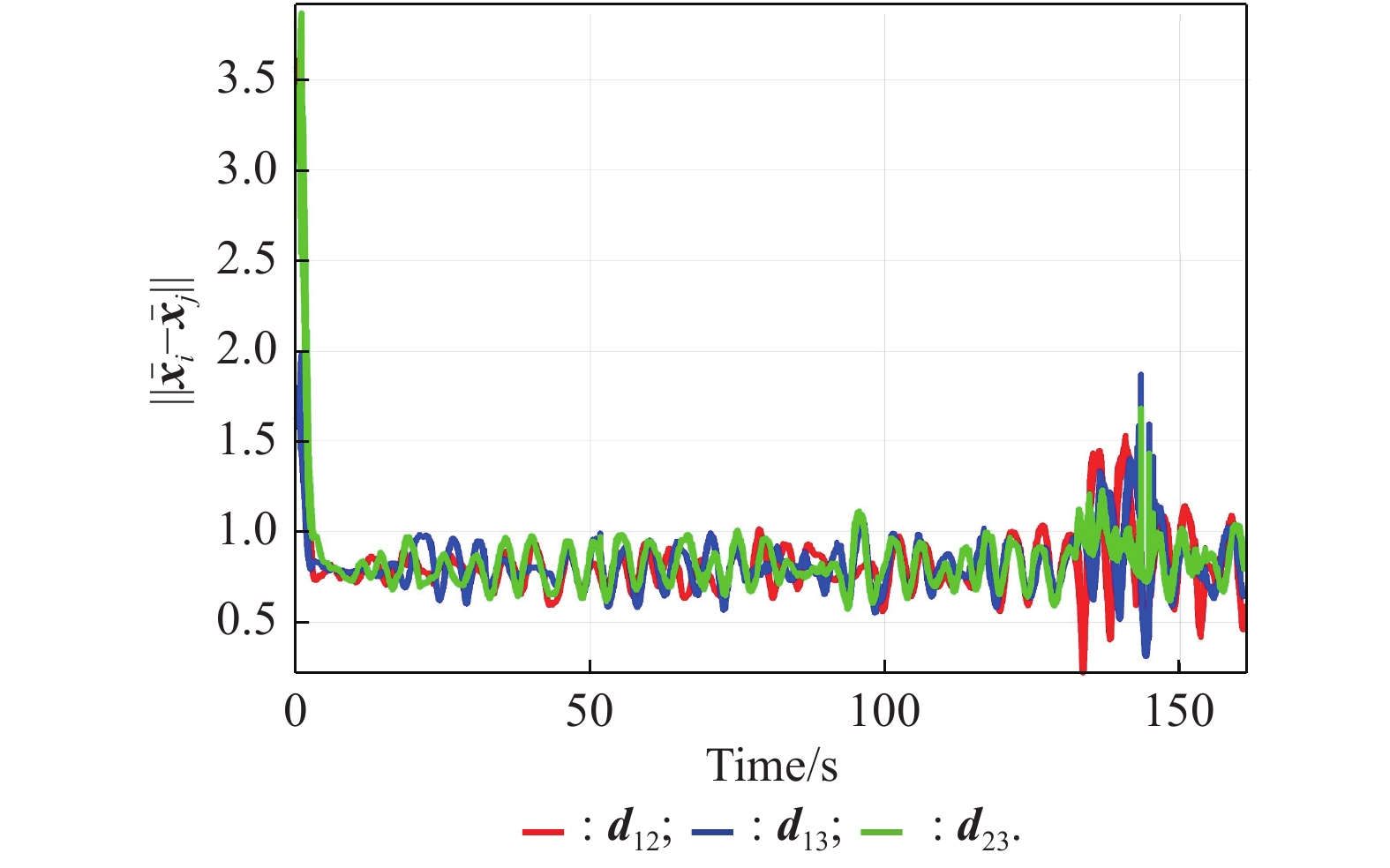
Fig 10
Evaluation of the consensus’ performance (proposed time-triggered approach)"
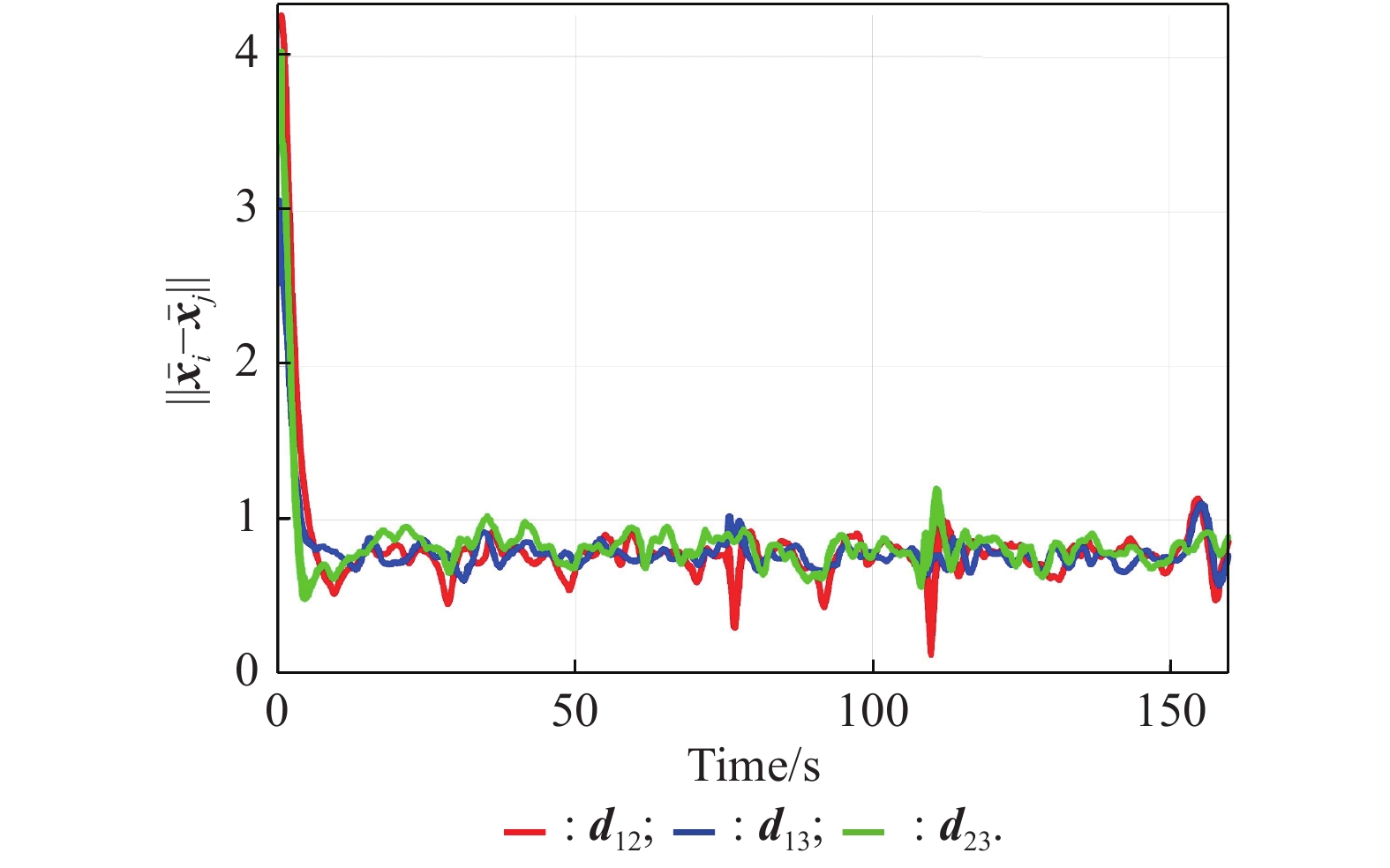
Fig 11
Evaluation of consensus’ performance (proposed event-triggered approach)"
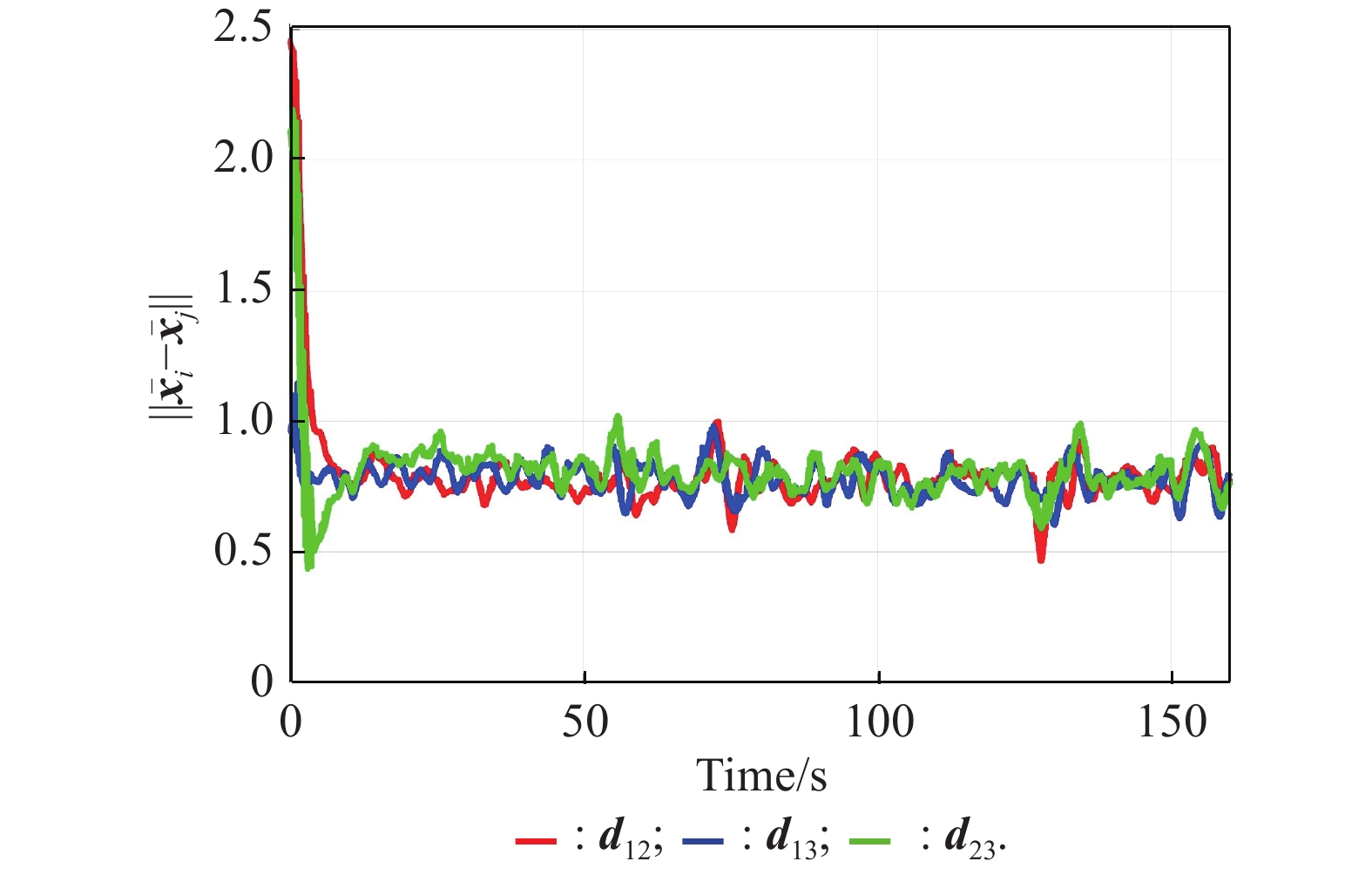
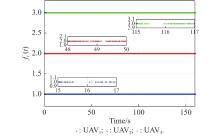
Fig 12
Events for updating the control law"
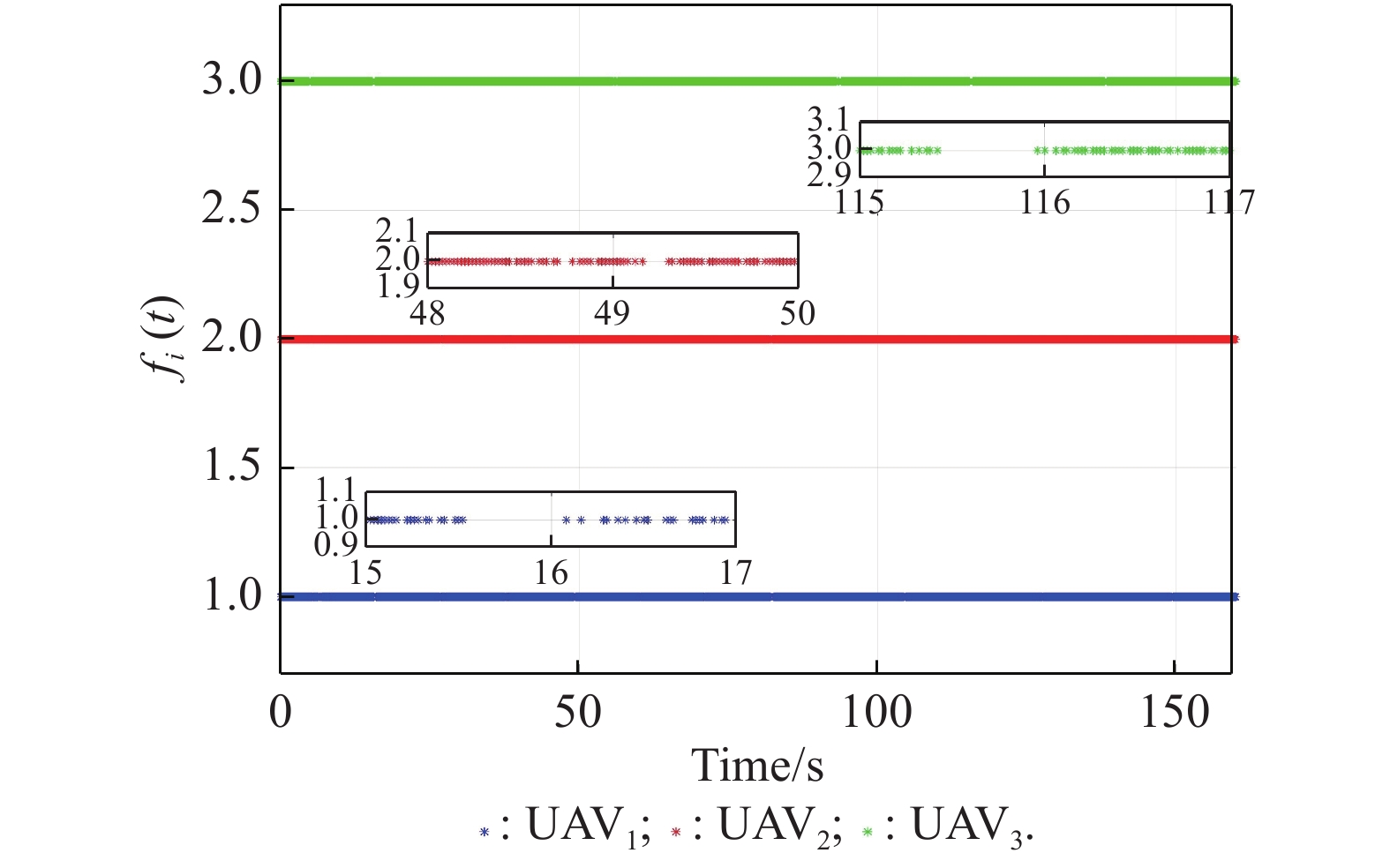
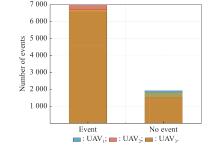
Fig 13
Total number of events in each UAV"
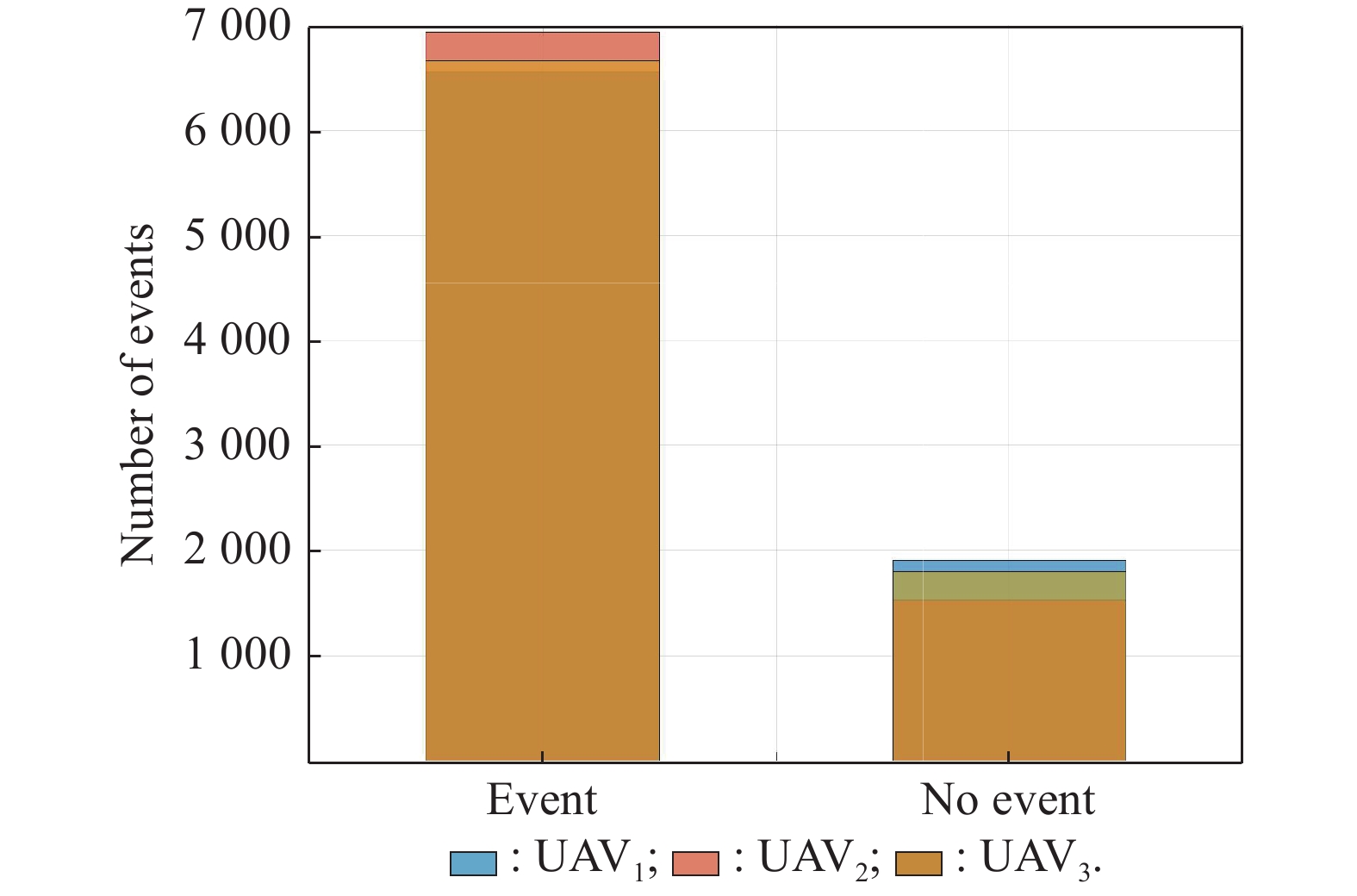
Table 2
Comparison of the consensus RMS"
| dij | Classical | Time-triggered | Event-triggered |
| d12 | 0.9129 | 0.8947 | 0.8932 |
| d13 | 0.9060 | 0.8910 | 0.8818 |
| d23 | 0.9189 | 0.9088 | 0.8978 |
| 1 | LI Z K, DUAN Z S. Cooperative control of multi-agent systems: a consensus region approach. London: CRC Press, 2014. |
| 2 | NI W, CHENG D Z Leader-following consensus of multi-agent systems under fixed and switching topologies. Systems & Control Letters, 2010, 59 (3): 209- 217. |
| 3 |
ZHANG Y Y, LI R F, ZHAO W, et al Stochastic leader-following consensus of multi-agent systems with measurement noises and communication time-delays. Neurocomputing, 2018, 282, 136- 145.
doi: 10.1016/j.neucom.2017.12.024 |
| 4 |
CUI B, ZHAO C H, MA T D, et al Leaderless and leader-following consensus of multi-agent chaotic systems with unknown time delays and switching topologies. Nonlinear Analysis: Hybrid Systems, 2017, 24, 115- 131.
doi: 10.1016/j.nahs.2016.11.007 |
| 5 |
JIANG J H, JIANG Y Y Leader-following consensus of linear time-varying multi-agent systems under fixed and switching topologies. Automatica, 2020, 113, 108804.
doi: 10.1016/j.automatica.2020.108804 |
| 6 |
BELKADI A, CIARLETTA L, THEILLIOL D Particle swarm optimization method for the control of a fleet of unmanned aerial vehicles. Journal of Physics: Conference Series, 2015, 659, 012015.
doi: 10.1088/1742-6596/659/1/012015 |
| 7 | VAZQUEZ TREJO J A, ROTONDO D, MEDINA M, et al Observer-based event-triggered model reference control for multi-agent systems. Proc. of the International Conference on Unmanned Aircraft Systems, 2020, 421- 428. |
| 8 |
DENG C, CHE W W, WU Z G A dynamic periodic event-triggered approach to consensus of heterogeneous linear multiagent systems with time-varying communication delays. IEEE Trans. on Cybernetics, 2021, 51 (4): 1812- 1821.
doi: 10.1109/TCYB.2020.3015746 |
| 9 |
WANG Z D, YANG F W, HO D W C, et al Robust H∞ control for networked systems with random packet losses. IEEE Trans. on Systems, Man, and Cybernetics, Part B (Cybernetics), 2007, 37 (4): 916- 924.
doi: 10.1109/TSMCB.2007.896412 |
| 10 |
CHEN C, XIE K, LEWIS F L, et al Adaptive synchronization of multi-agent systems with resilience to communication link faults. Automatica, 2020, 111, 108636.
doi: 10.1016/j.automatica.2019.108636 |
| 11 | LIU D, YANG G H A dynamic event-triggered control approach to leader-following consensus for linear multiagent systems. IEEE Trans. on Systems, Man, and Cybernetics: Systems, 2020, 51 (10): 6271- 6279. |
| 12 | LOSADA M G. Contributions to networked and event-triggered control of linear systems. Switzerland: Springer International Publishing, 2016. |
| 13 |
SEYBOTH G S, DIMAROGONAS D V, JOHANSSON K H Event-based broadcasting for multi-agent average consensus. Automatica, 2013, 49 (1): 245- 252.
doi: 10.1016/j.automatica.2012.08.042 |
| 14 | LUNZE L. Control theory of digitally networked dynamic systems. Switzerland: Springer International Publishing, 2014. |
| 15 | OBERMAISSER R. Event-triggered and time-triggered control paradigms. US: Springer, 2004. |
| 16 |
WANG Y L, CAO J D, WANG H J, et al Event-triggering consensus for second-order leader-following multiagent systems with nonlinear time-delayed dynamics. International Journal of Control, Automation and Systems, 2020, 18 (5): 1083- 1093.
doi: 10.1007/s12555-019-0385-x |
| 17 |
REN J, QIANG S, GAO Y B, et al Leader-following bipartite consensus of second-order time-delay nonlinear multi-agent systems with event-triggered pinning control under signed digraph. Neurocomputing, 2020, 385, 186- 196.
doi: 10.1016/j.neucom.2019.12.043 |
| 18 |
YE Y Y, SU H S Leader-following consensus of general linear fractional-order multiagent systems with input delay via event-triggered control. International Journal of Robust and Nonlinear Control, 2018, 28 (18): 5717- 5729.
doi: 10.1002/rnc.4339 |
| 19 | TAN X, CAO J, LI X, et al Leader-following mean square consensus of stochastic multi-agent systems with input delay via event-triggered control. IET Control Theory & Applications, 2017, 12 (2): 299- 309. |
| 20 |
CAI Y L, ZHANG H G, ZHANG J, et al Distributed bipartite leader-following consensus of linear multi-agent systems with input time delay based on event-triggered transmission mechanism. ISA Transactions, 2020, 100, 221- 234.
doi: 10.1016/j.isatra.2019.11.022 |
| 21 | VANZQUEZ TREJO J A, THEILLIOL D, MEDINA M, et al. Leader-following formation control for networked multi-agent systems under communication faults/failures. Proc. of the Conference of Advances in Diagnostics of Processes and Systems, 2021, 313: 45−57. |
| 22 |
LANGVILLE A, STEWART W J The Kronecker product and stochastic automata networks. Journal of Computational and Applied Mathematics, 2004, 167 (2): 429- 447.
doi: 10.1016/j.cam.2003.10.010 |
| 23 | ZHOU K M, DOYLE J C. Essentials of robust control. New Jersey: Prentice Hall, 1998. |
| 24 |
OLFATI-SABER R, MURRAY R M Consensus problems in networks of agents with switching topology and time-delays. IEEE Trans. on Automatic Control, 2004, 49 (9): 1520- 1533.
doi: 10.1109/TAC.2004.834113 |
| 25 |
GEORGES J P, THEILLIOL D, COCQUEMPOT V, et al Fault tolerance in networked control systems under intermittent observations. International Journal of Applied Mathematics and Computer Science, 2011, 21 (4): 639- 648.
doi: 10.2478/v10006-011-0050-x |
| 26 |
KIM J H, PARK H B H∞ state feedback control for generalized continuous/discrete time-delay system. Automatica, 1999, 35, 1443- 1451.
doi: 10.1016/S0005-1098(99)00038-2 |
| 27 |
GUERRERO-CASTELLANOS J F, VEGA-ALONZO A, DURAND S, et al Leader-following consensus and formation control of VTOL-UAVs with event-triggered communications. Sensors, 2019, 19 (24): 5498.
doi: 10.3390/s19245498 |
| [1] | Honghong ZHANG, Xusheng GAN, Shuangfeng LI, Zhiyuan CHEN. UAV safe route planning based on PSO-BAS algorithm [J]. Journal of Systems Engineering and Electronics, 2022, 33(5): 1151-1160. |
| [2] | Yangjun GAO, Guangyun LI, Zhiwei LYU, Lundong ZHANG, Zhongpan LI. Improved adaptively robust estimation algorithm for GNSS spoofer considering continuous observation error [J]. Journal of Systems Engineering and Electronics, 2022, 33(5): 1237-1248. |
| [3] | Yuan ZENG, Wenbin LU, Bo YU, Shifei TAO, Haosu ZHOU, Yu CHEN. Improved IMM algorithm based on support vector regression for UAV tracking [J]. Journal of Systems Engineering and Electronics, 2022, 33(4): 867-876. |
| [4] | Dongju CAO, Wendong YANG, Hui CHEN, Yang WU, Xuanxuan TANG. Energy efficiency maximization for buffer-aided multi-UAV relaying communications [J]. Journal of Systems Engineering and Electronics, 2022, 33(2): 312-321. |
| [5] | Yangyang JIANG, Yan GAO, Wenqi SONG, Yue LI, Quan QUAN. Bibliometric analysis of UAV swarms [J]. Journal of Systems Engineering and Electronics, 2022, 33(2): 406-425. |
| [6] | Jinqiang HU, Husheng WU, Renjun ZHAN, Rafik MENASSEL, Xuanwu ZHOU. Self-organized search-attack mission planning for UAV swarm based on wolf pack hunting behavior [J]. Journal of Systems Engineering and Electronics, 2021, 32(6): 1463-1476. |
| [7] | Ziquan YU, Youmin ZHANG, Bin JIANG. PID-type fault-tolerant prescribed performance control of fixed-wing UAV [J]. Journal of Systems Engineering and Electronics, 2021, 32(5): 1053-1061. |
| [8] | Tao YE, Zongyang ZHAO, Jun ZHANG, Xinghua CHAI, Fuqiang ZHOU. Low-altitude small-sized object detection using lightweight feature-enhanced convolutional neural network [J]. Journal of Systems Engineering and Electronics, 2021, 32(4): 841-853. |
| [9] | Kada BELKACEM, Khalid MUNAWAR, Shafique Shaikh MUHAMMAD. Distributed cooperative control of autonomous multi-agent UAV systems using smooth control [J]. Journal of Systems Engineering and Electronics, 2020, 31(6): 1297-1307. |
| [10] | Enjiao ZHAO, Zenan ZHONG, Xin ZHENG. Finite-time control of formation system for multiple flight vehicles subject to actuator saturation [J]. Journal of Systems Engineering and Electronics, 2020, 31(5): 1019-1030. |
| [11] | Yandong LI, Ling ZHU, Yuan GUO. Observer-based multivariable fixed-time formation control of mobile robots [J]. Journal of Systems Engineering and Electronics, 2020, 31(2): 403-414. |
| [12] | Gaofeng WU, Kaifang WAN, Xiaoguang GAO, Xiaowei FU. Placement of unmanned aerial vehicles as communication relays in two-tiered multi-agent system: clustering based methods [J]. Journal of Systems Engineering and Electronics, 2020, 31(2): 231-242. |
| [13] | Zhen XU, Enze ZHANG, Qingwei CHEN. Rotary unmanned aerial vehicles path planning in rough terrain based on multi-objective particle swarm optimization [J]. Journal of Systems Engineering and Electronics, 2020, 31(1): 130-141. |
| [14] | Min ZHANG, Chenming ZHENG, Kun HUANG. Fixed-wing UAV guidance law for ground target over-flight tracking [J]. Journal of Systems Engineering and Electronics, 2019, 30(2): 384-392. |
| [15] | Zhiqiang JIAO, Peiyang YAO, Jieyong ZHANG, Yun ZHONG, Xun WANG. MAV/UAV task coalition phased-formation method [J]. Journal of Systems Engineering and Electronics, 2019, 30(2): 402-414. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||