
Journal of Systems Engineering and Electronics ›› 2023, Vol. 34 ›› Issue (3): 766-774.doi: 10.23919/JSEE.2023.000047
• CONTROL THEORY AND APPLICATION • Previous Articles
Zhengyu YE( ), Bin JIANG(), Yuehua CHENG(), Ziquan YU(), Yang YANG()
), Bin JIANG(), Yuehua CHENG(), Ziquan YU(), Yang YANG()
Received:2022-03-02
Online:2023-06-15
Published:2023-06-30
Contact:
Bin JIANG
E-mail:kasoll076@outlook.com;binjiang@nuaa.edu.cn;chengyuehua@nuaa.edu.cn;yuziquan@nuaa.edu.cn;youngy@nuaa.edu.cn
About author:Supported by:Zhengyu YE, Bin JIANG, Yuehua CHENG, Ziquan YU, Yang YANG. Distributed fault diagnosis observer for multi-agent system against actuator and sensor faults[J]. Journal of Systems Engineering and Electronics, 2023, 34(3): 766-774.
Add to citation manager EndNote|Reference Manager|ProCite|BibTeX|RefWorks
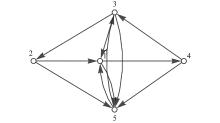
Fig 1
Connections among agents"
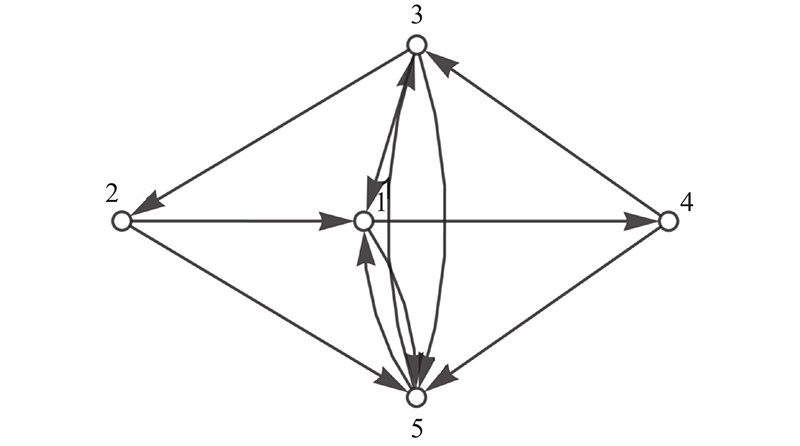
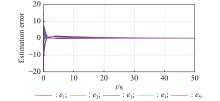
Fig 2
Fault-free scenario: estimation error ${\boldsymbol{e}}_{{\boldsymbol{1}}- {\boldsymbol{5}}}$ "
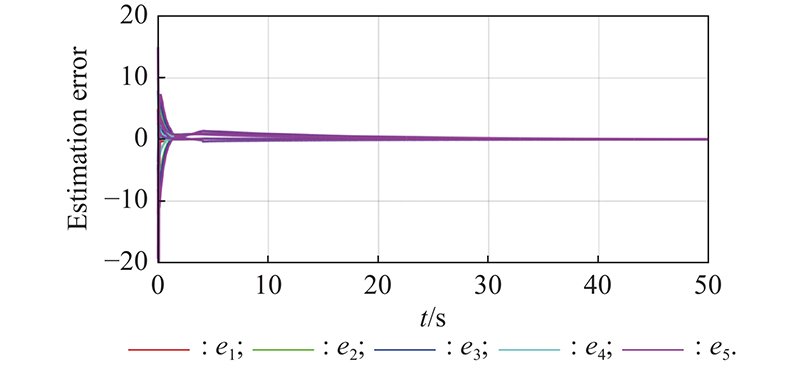
Fig 3
Fault-free scenario: ${\boldsymbol{x}}$ and $\hat{{\boldsymbol{x}}}$ "
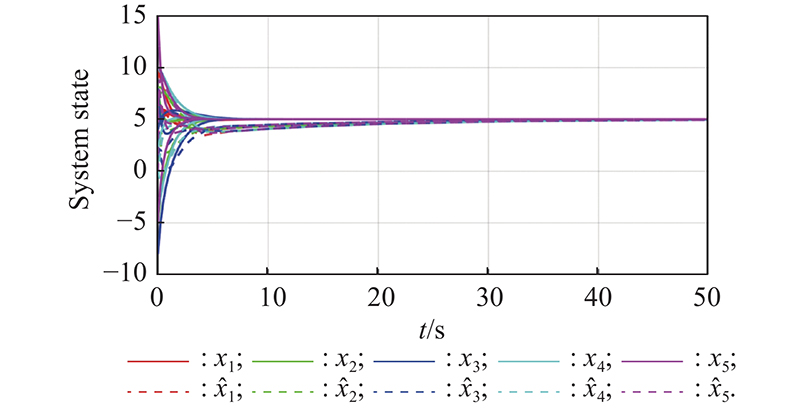
Fig 4
Fault-free scenario: ${\boldsymbol{f}}_{{\boldsymbol{a}}}$ and $\hat{{\boldsymbol{f}}}_{\boldsymbol{a}}$ "
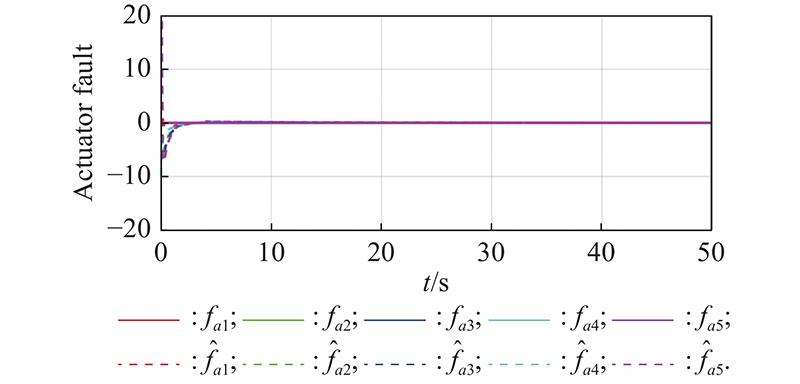
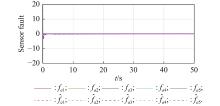
Fig 5
Fault-free scenario: ${\boldsymbol{f}}_{{\boldsymbol{s}}}$ and $\hat{{\boldsymbol{f}}}_{\boldsymbol{s}}$ "
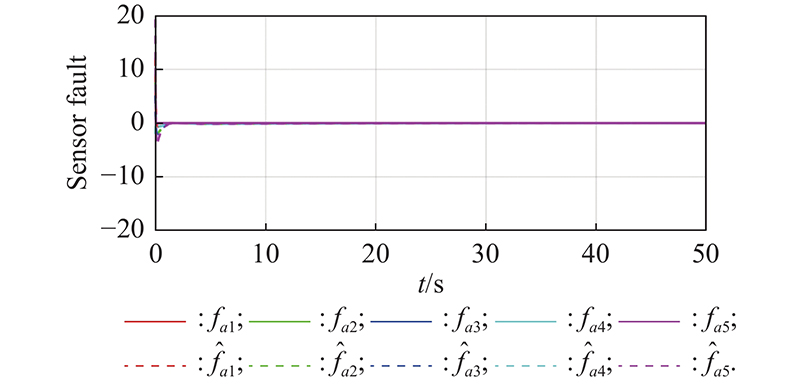
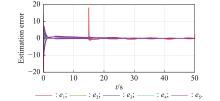
Fig 6
Actuator fault scenario: estimation error: ${\boldsymbol{e}}_{{\boldsymbol{1}}- {\boldsymbol{5}}}$ "
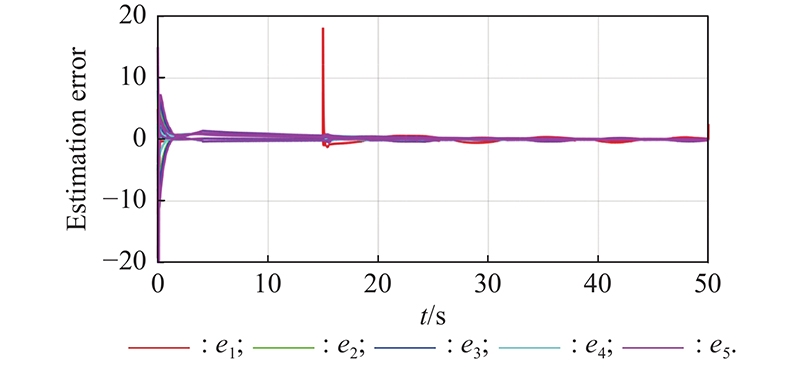
Fig 7
Actuator fault scenario: ${\boldsymbol{x}}$ and $\hat{{\boldsymbol{x}}}$ "
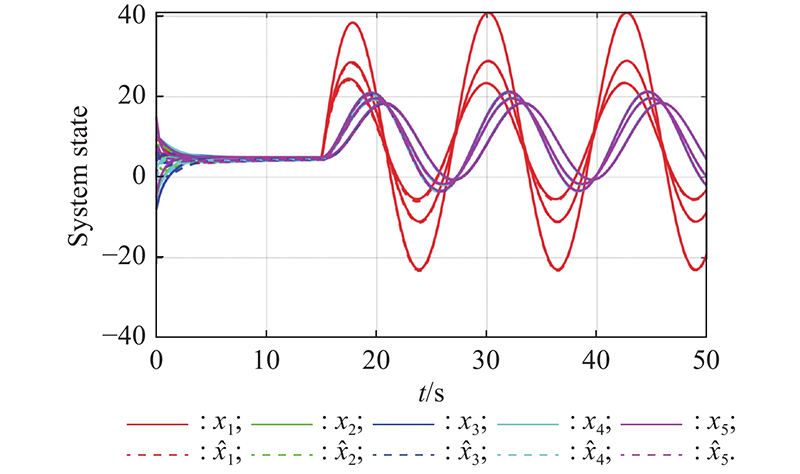
Fig 8
Actuator fault scenario: ${\boldsymbol{f}}_{{\boldsymbol{a}}}$ and $\hat{{\boldsymbol{f}}}_{\boldsymbol{a}}$ "
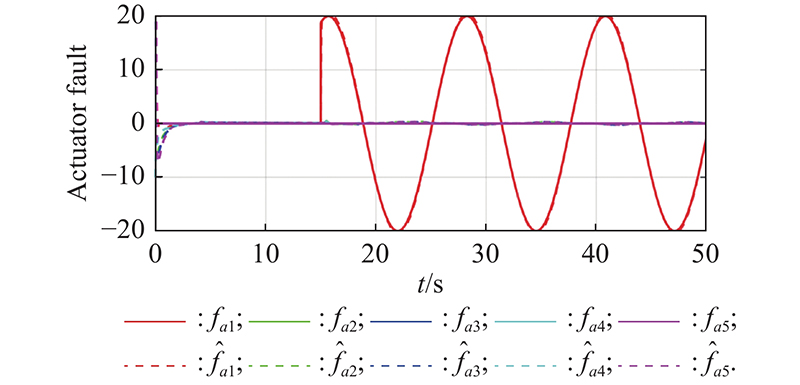
Fig 9
Actuator fault scenario: ${\boldsymbol{f}}_{{\boldsymbol{s}}}$ and $\hat{{\boldsymbol{f}}}_{\boldsymbol{s}}$ "
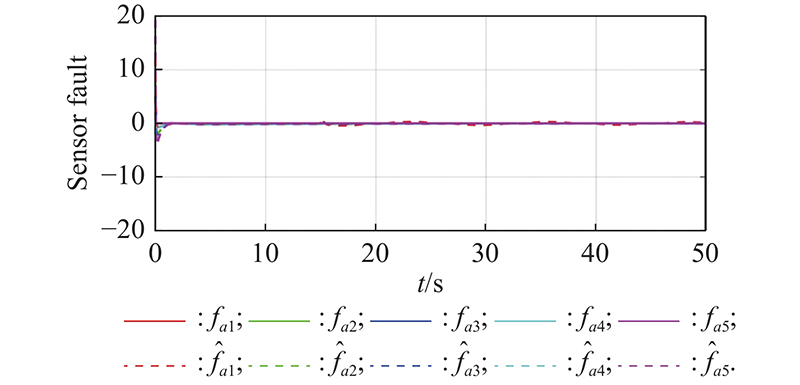
Fig 10
Sensor fault scenario: estimation error: ${\boldsymbol{e}}_{{\boldsymbol{1}}- {\boldsymbol{5}}}$ "
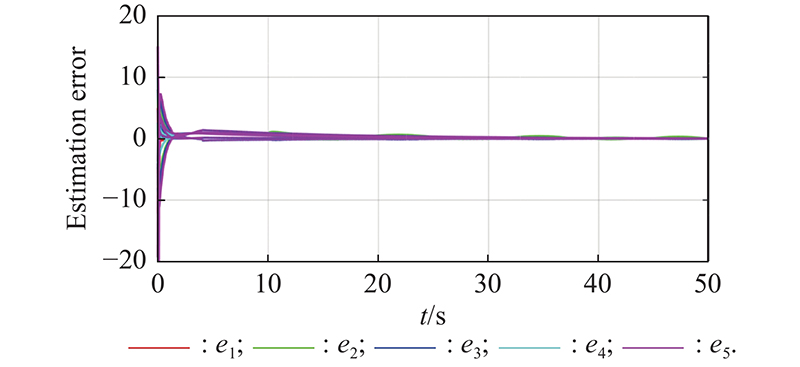
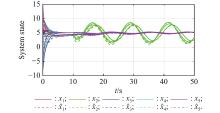
Fig 11
Sensor fault scenario: ${\boldsymbol{x}}$ and $\hat{{\boldsymbol{x}}}$ "
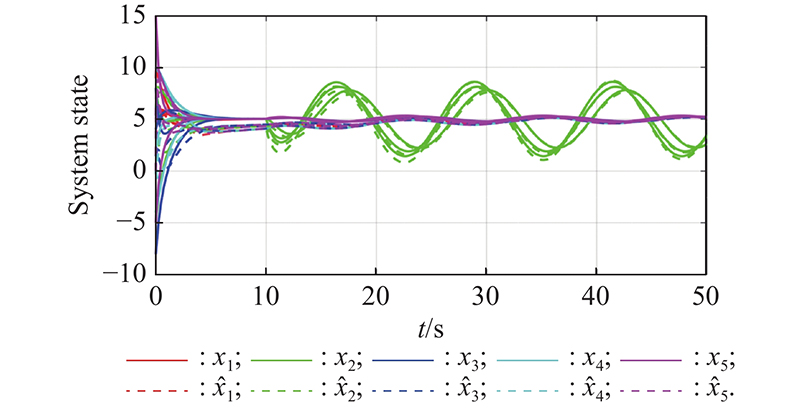
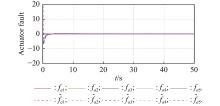
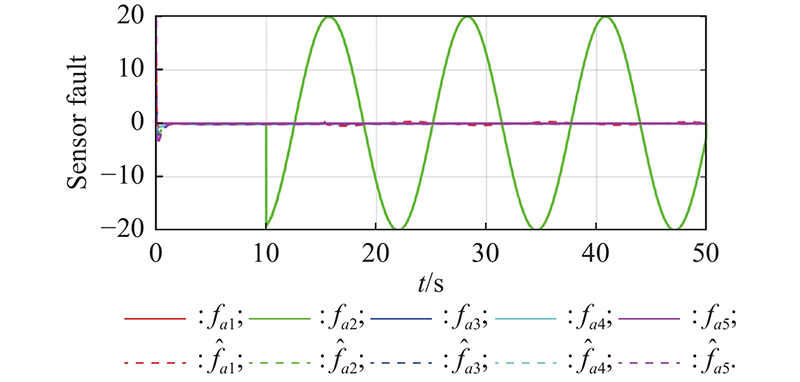
Fig 12
Sensor fault scenario: ${\boldsymbol{f}}_{{\boldsymbol{a}}}$ and $\hat{{\boldsymbol{f}}}_{\boldsymbol{a}}$ "
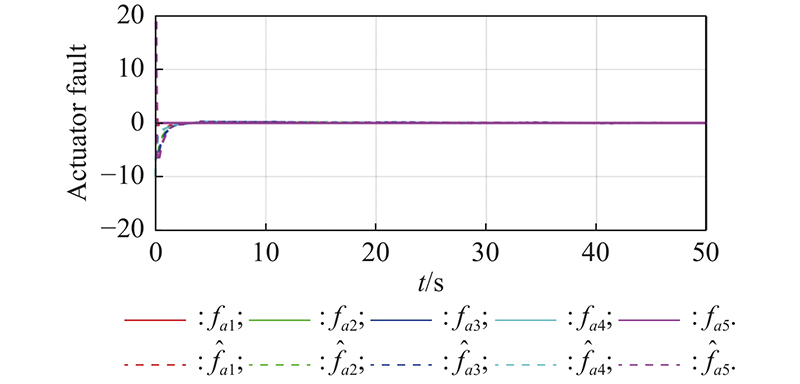
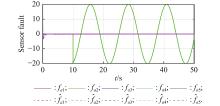
Fig 13
Sensor fault scenario: ${\boldsymbol{f}}_{{\boldsymbol{s}}}$ and $\hat{{\boldsymbol{f}}}_{\boldsymbol{s}}$ "
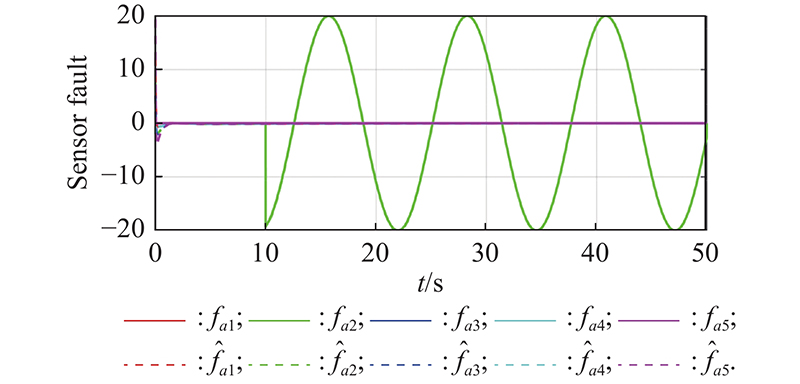
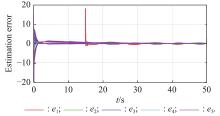
Fig 14
Concurrent fault scenario: estimation error: ${\boldsymbol{e}}_{{\boldsymbol{1}}- {\boldsymbol{5}}}$ "
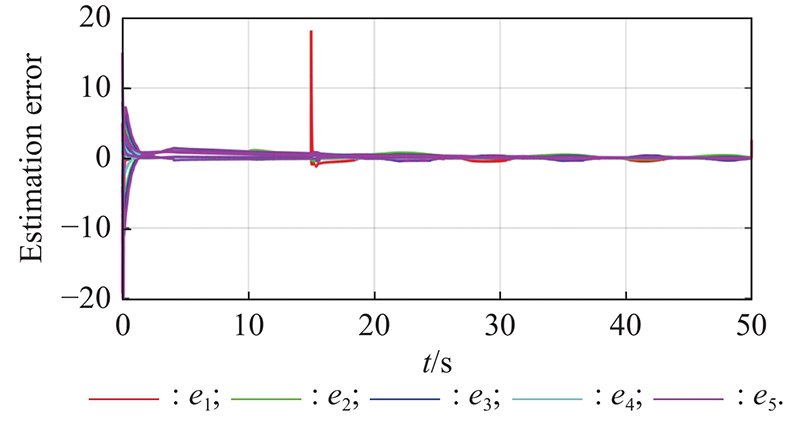
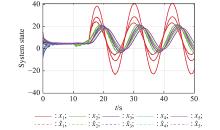
Fig 15
Concurrent fault scenario: ${\boldsymbol{x}}$ and $\hat{{\boldsymbol{x}}}$ "
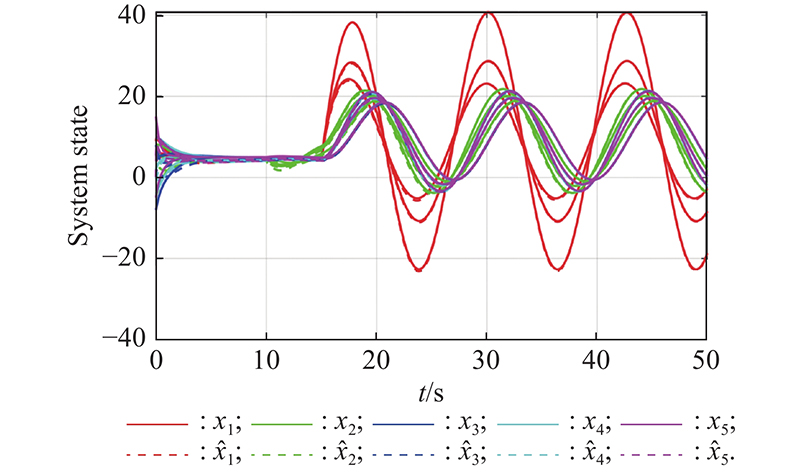
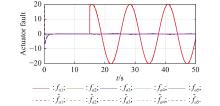
Fig 16
Concurrent fault scenario: ${\boldsymbol{f}}_{{\boldsymbol{a}}}$ and $\hat{{\boldsymbol{f}}}_{\boldsymbol{a}}$ "
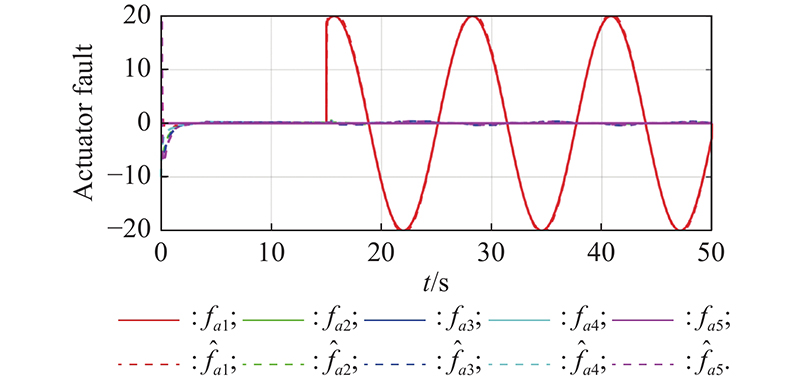
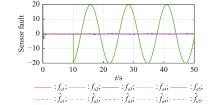
Fig 17
Concurrent fault scenario: ${\boldsymbol{f}}_{{\boldsymbol{s}}}$ and $\hat{{\boldsymbol{f}}}_{\boldsymbol{s}}$ "
| 1 |
JIN X Z, LU S Y, DENG C, et al Distributed adaptive security consensus control for a class of multi-agent systems under network decay and intermittent attacks. Information Sciences, 2021, 547, 88- 102.
doi: 10.1016/j.ins.2020.08.013 |
| 2 |
YU Z Q, ZHANG Y M, JIANG B PID-type fault-tolerant prescribed performance control of fixed-wing UAV. Journal of Systems Engineering and Electronics, 2021, 32 (5): 1053- 1061.
doi: 10.23919/JSEE.2021.000090 |
| 3 |
SHAKHATREH H, SAWALMEH A H, AL-FUQAHA A, et al Unmanned aerial vehicles (UAVs): a survey on civil applications and key research challenges. IEEE Access, 2019, 7, 48572- 48634.
doi: 10.1109/ACCESS.2019.2909530 |
| 4 | WANG T, HUANG P F, DONG G Q Cooperative persistent surveillance on a road network by multi-UGVs with detection ability. IEEE Trans. on Industrial Electronics, 2021, 69 (11): 11468- 11478. |
| 5 |
HU J Y, BHOWMICK P, JANG I, et al A decentralized cluster formation containment framework for multirobot systems. IEEE Trans. on Robotics, 2021, 37 (6): 1936- 1955.
doi: 10.1109/TRO.2021.3071615 |
| 6 |
KADA B, KHALID M, SHAIKH M S Distributed cooperative control of autonomous multi-agent UAV systems using smooth control. Journal of Systems Engineering and Electronics, 2020, 31 (6): 1297- 1307.
doi: 10.23919/JSEE.2020.000100 |
| 7 |
CHENG W L, ZHANG K, JIANG B, et al Fixed-time faulttolerant formation control for heterogeneous multi-agent systems with parameter uncertainties and disturbances. IEEE Trans. on Circuits and Systems I: Regular Papers, 2021, 68 (5): 2121- 2133.
doi: 10.1109/TCSI.2021.3061386 |
| 8 |
CHENG W L, JIANG B, ZHANG K, et al Robust finite-time cooperative formation control of UGV-UAV with model uncertainties and actuator faults. Journal of the Franklin Institute, 2021, 358 (17): 8811- 8837.
doi: 10.1016/j.jfranklin.2021.08.038 |
| 9 |
YANG P, MA B, DONG Y, et al Fault-tolerant consensus of leader-following multi-agent systems based on distributed fault estimation observer. International Journal of Control, Automation and Systems, 2018, 16 (5): 2354- 2362.
doi: 10.1007/s12555-017-0223-y |
| 10 |
XU X L, LI Z T, GAO L X Distributed adaptive tracking control for multi-agent systems with uncertain dynamics. Nonlinear Dynamics, 2017, 90 (4): 2729- 2744.
doi: 10.1007/s11071-017-3833-2 |
| 11 | BOEM F, GALLO A J, RAIMONDO D M, et al Distributed fault-tolerant control of large-scale systems: an active fault diagnosis approach. IEEE Trans. on Control of Network Systems, 2019, 7 (1): 288- 301. |
| 12 | ZHANG K, JIANG B, CHEN M, et al Distributed fault estimation and fault-tolerant control of interconnected systems. IEEE Trans. on Cybernetics, 2019, 51 (3): 1230- 1240. |
| 13 |
AMIN A A, HASANA K M A review of fault tolerant control systems: advancements and applications. Measurement, 2019, 143, 58- 68.
doi: 10.1016/j.measurement.2019.04.083 |
| 14 |
LI D L, WANG Y, WANG J X, et al Recent advances in sensor fault diagnosis: a review. Sensors and Actuators A: Physical, 2020, 309, 111990.
doi: 10.1016/j.sna.2020.111990 |
| 15 | YU Y, ZHAO Y Z, WANG B, et al Current sensor fault diagnosis and tolerant control for VSI-based induction motor drives. IEEE Trans. on Power Electronics, 2017, 33 (5): 4238- 4248. |
| 16 |
WU Y K, JIANG B, WANG Y L Incipient winding fault detection and diagnosis for squirrel-cage induction motors equipped on CRH trains. ISA Transactions, 2020, 99, 488- 495.
doi: 10.1016/j.isatra.2019.09.020 |
| 17 | SHAHNAZARI H, MHASKAR P Distributed fault diagnosis for networked nonlinear uncertain systems. Computers & Chemical Engineering, 2018, 115, 22- 33. |
| 18 |
LI J, PAN K P, SU Q Y Sensor fault detection and estimation for switched power electronics systems based on sliding mode observer. Applied Mathematics and Computation, 2019, 353, 282- 294.
doi: 10.1016/j.amc.2019.02.010 |
| 19 |
ZHANG J, LI S, XIANG Z R Adaptive fuzzy finite-time fault tolerant control for switched nonlinear large-scale systems with actuator and sensor faults. Journal of the Franklin Institute, 2020, 357 (16): 11629- 11644.
doi: 10.1016/j.jfranklin.2019.09.005 |
| 20 |
DU D S Fault detection for discrete-time linear systems based on descriptor observer approach. Applied Mathematics and Computation, 2017, 293, 575- 585.
doi: 10.1016/j.amc.2016.08.052 |
| 21 |
CHEN T R, ZHU Z J, WANG C, et al Rapid sensor fault diagnosis for a class of nonlinear systems via deterministic learning. IEEE Trans. on Neural Networks and Learning Systems, 2022, 33 (12): 7743- 7754.
doi: 10.1109/TNNLS.2021.3087533 |
| 22 |
LIU M, SHI P Sensor fault estimation and tolerant control for Itô stochastic systems with a descriptor sliding mode approach. Automatica, 2013, 49 (5): 1242- 1250.
doi: 10.1016/j.automatica.2013.01.030 |
| 23 | GAO Z W, DING S X Sensor fault reconstruction and sensor compensation for a class of nonlinear state-space systems via a descriptor system approach. IET Control Theory & Applications, 2007, 1 (3): 578- 585. |
| 24 | LI X H, AHN C K, LU D K, et al Robust simultaneous fault estimation and nonfragile output feedback fault-tolerant control for Markovian jump systems. IEEE Trans. on Systems, Man, and Cybernetics, 2018, 49 (9): 1769- 1776. |
| 25 | WU Y K, JIANG B, LU N Y A descriptor system approach for estimation of incipient faults with application to high-speed railway traction devices. IEEE Trans. on Systems, Man, and Cybernetics: Systems, 2017, 49 (10): 2108- 2118. |
| 26 |
GOMEZ-PENATE S, VALENCIA-PALOMO G, LOPEZESTRADA F R, et al Sensor fault diagnosis based on a $ {{\cal{H}}_\infty }$ sliding mode and unknown input observer for Takagi-Sugeno systems with uncertain premise variables . Asian Journal of Control, 2019, 21 (1): 339- 353.
doi: 10.1002/asjc.1913 |
| 27 |
YIN S, GAO H J, QIU J B, et al Descriptor reduced-order sliding mode observers design for switched systems with sensor and actuator faults. Automatica, 2017, 76, 282- 292.
doi: 10.1016/j.automatica.2016.10.025 |
| 28 | GAO Z W, WANG H Descriptor observer approaches for multivariable systems with measurement noises and application in fault detection and diagnosis. Systems & Control Letters, 2006, 55 (4): 304- 313. |
| 29 |
ZHU J W, YANG G H, ZHANG W A Cooperative fault tolerant tracking control for multiagent systems: an intermediate estimator-based approach. IEEE Trans. on Cybernetics, 2018, 48 (10): 2972- 2980.
doi: 10.1109/TCYB.2017.2753383 |
| 30 | HANG J, LIU X H, GAO X W, et al Intermediate observerbased robust distributed fault estimation for nonlinear multiagent systems with directed graphs. IEEE Trans. on Industrial Informatics, 2019, 16 (12): 7426- 7436. |
| 31 | MA H J, XU L Cooperative fault diagnosis for uncertain nonlinear multiagent systems based on adaptive distributed fuzzy estimators. IEEE Trans. on Cybernetics, 2018, 50 (4): 1739- 1751. |
| 32 |
QIN L G, HE X, YAN R, et al Distributed sensor fault diagnosis for a formation of multi-vehicle systems. Journal of the Franklin Institute, 2019, 356 (2): 791- 818.
doi: 10.1016/j.jfranklin.2017.11.020 |
| 33 |
ZHOU D H, QIN L G, HE X, et al Distributed sensor fault diagnosis for a formation system with unknown constant time delays. Science China Information Sciences, 2018, 61, 112205.
doi: 10.1007/s11432-017-9309-3 |
| 34 | BALAKRISHNAN R, RANGANATHAN K. A textbook of graph theory. Heidelberg: Springer, 2012. |
| 35 | ZHAN X Z. Matrix theory. Rhode Island: American Mathematical Society, 2013. |
| 36 |
NIU Y, LAM J, WANG X, et al Observer-based sliding mode control for nonlinear state-delayed systems. International Journal of Systems Science, 2004, 35 (2): 139- 150.
doi: 10.1080/00207720410001671732 |
| 37 |
WEI Q L, WANG X, ZHONG X N, et al Consensus control of leader-following multi-agent systems in directed topology with heterogeneous disturbances. IEEE/CAA Journal of Automatica Sinica, 2021, 8 (2): 423- 431.
doi: 10.1109/JAS.2021.1003838 |
| 38 |
GAO Z R, LI C D, WANG X, et al Finite-time consensus of linear multi-agent system via distributed event-triggered strategy. Journal of the Franklin Institute, 2018, 355 (3): 1338- 1350.
doi: 10.1016/j.jfranklin.2017.12.026 |
| [1] | Yajie MA, Bin JIANG, Hao REN. Minimum eigenvalue based adaptive fault compensation for hypersonic vehicles [J]. Journal of Systems Engineering and Electronics, 2023, 34(2): 492-500. |
| [2] | Pu YANG, Xukai HU, Zixin WANG, Zhiqing ZHANG. Sliding mode fault tolerant consensus control for multi-agent systems based on super-twisting observer [J]. Journal of Systems Engineering and Electronics, 2022, 33(6): 1309-1319. |
| [3] | Narin JEERANANTASIN, Suksun NUNGAM. Sliding mode control of three-phase AC/DC converters using exponential rate reaching law [J]. Journal of Systems Engineering and Electronics, 2022, 33(1): 210-221. |
| [4] | Yuwei CUI, Aijun LI, Xianfeng MENG. A fault-tolerant control method for distributed flight control system facing wing damage [J]. Journal of Systems Engineering and Electronics, 2021, 32(5): 1041-1052. |
| [5] | Ziquan YU, Youmin ZHANG, Bin JIANG. PID-type fault-tolerant prescribed performance control of fixed-wing UAV [J]. Journal of Systems Engineering and Electronics, 2021, 32(5): 1053-1061. |
| [6] | Fuhui GUO, Pingli LU. Fast self-adapting high-order sliding mode control for a class of uncertain nonlinear systems [J]. Journal of Systems Engineering and Electronics, 2021, 32(3): 690-699. |
| [7] | Zongxing LI, Rui ZHANG. Time-varying sliding mode control of missile based on suboptimal method [J]. Journal of Systems Engineering and Electronics, 2021, 32(3): 700-710. |
| [8] | Wei LI, Qiuqiu WEN, Lei HE, Qunli XIA. Three-dimensional impact angle constrained distributed cooperative guidance law for anti-ship missiles [J]. Journal of Systems Engineering and Electronics, 2021, 32(2): 447-459. |
| [9] | Guangbin CAI, Yushan ZHAO, Yang ZHAO, Changhua HU. Consensus of multi-vehicle cooperative attack with stochastic multi-hop time-varying delay and actuator fault [J]. Journal of Systems Engineering and Electronics, 2021, 32(1): 228-242. |
| [10] | Xia WU, Yan LI, Yongjian SUN, Alei CHEN, Jianwen CHEN, Jianchao MA, Hao CHEN. Investigation of MAS structure and intelligent+ information processing mechanism of hypersonic target detection and recognition system [J]. Journal of Systems Engineering and Electronics, 2020, 31(6): 1105-1115. |
| [11] | Wenjie ZHANG, Shengnan FU, Wei LI, Qunli XIA. An impact angle constraint integral sliding mode guidance law for maneuvering targets interception [J]. Journal of Systems Engineering and Electronics, 2020, 31(1): 168-184. |
| [12] | Vedadi Moghaddam TAHMINEH, Yadavar Nikravesh SEYYED KAMALEDDIN, Azam Khosravi MOHAMMAD. Constrained sliding mode control of nonlinear fractional order input affine systems [J]. Journal of Systems Engineering and Electronics, 2019, 30(5): 995-1006. |
| [13] | Xiaogang QI, Bingchun WANG, Lifang LIU. Fault diagnosis based on dial-test data in datacenter networks [J]. Journal of Systems Engineering and Electronics, 2019, 30(5): 1035-1043. |
| [14] | Haibo LIU, Heping WANG, Junlei SUN. Attitude control for QTR using exponential nonsingular terminal sliding mode control [J]. Journal of Systems Engineering and Electronics, 2019, 30(1): 191-200. |
| [15] | Jianguo GUO, Yuchao LIU, Jun ZHOU. Integral terminal sliding mode control for nonlinear systems [J]. Journal of Systems Engineering and Electronics, 2018, 29(3): 571-579. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||