
Journal of Systems Engineering and Electronics ›› 2023, Vol. 34 ›› Issue (1): 81-98.doi: 10.23919/JSEE.2023.000005
• SYSTEMS ENGINEERING • Previous Articles Next Articles
Jianmai SHI( ), Jiaming ZHANG, Hongtao LEI, Zhong LIU, Rui WANG()
), Jiaming ZHANG, Hongtao LEI, Zhong LIU, Rui WANG()
Received:2021-02-15
Online:2023-02-18
Published:2023-03-03
Contact:
Rui WANG
E-mail:jshi1980@163.com;ruiwangnudt@gmail.com
About author:Supported by:Jianmai SHI, Jiaming ZHANG, Hongtao LEI, Zhong LIU, Rui WANG. Joint mission and route planning of unmanned air vehicles via a learning-based heuristic[J]. Journal of Systems Engineering and Electronics, 2023, 34(1): 81-98.
Add to citation manager EndNote|Reference Manager|ProCite|BibTeX|RefWorks
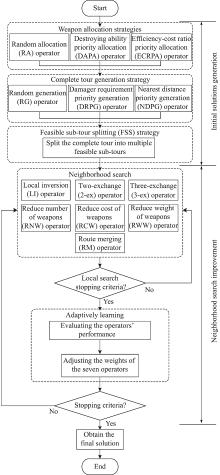
Fig 1
Framework of the P-ALNS"
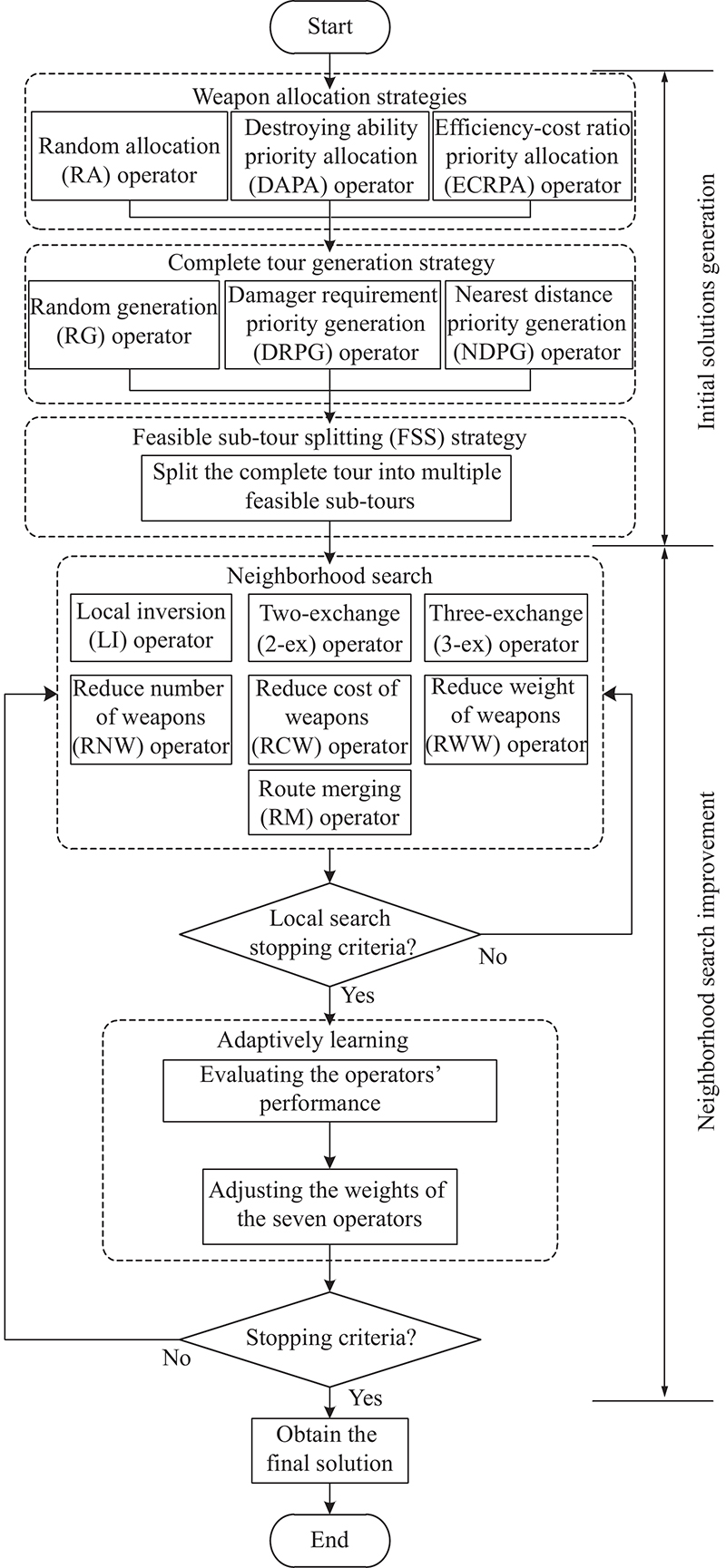
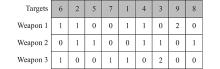
Fig 2
Example of solution representation"

Fig 3
Illustration of the results after splitting"
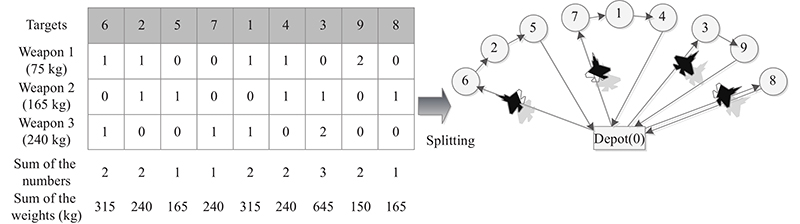
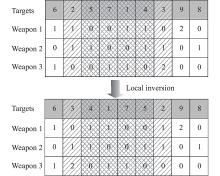
Fig 4
Illustration of the LI operator"
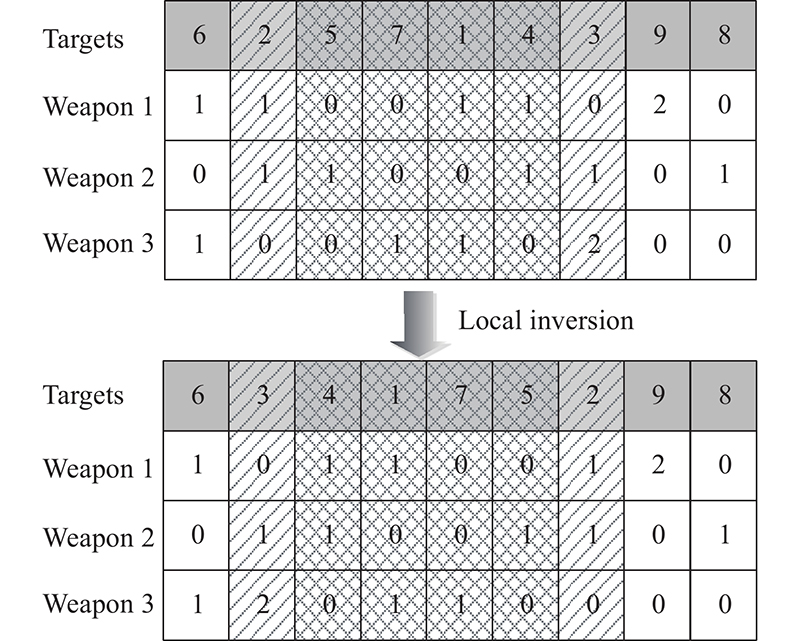

Fig 5
Illustration of 2-ex operator"
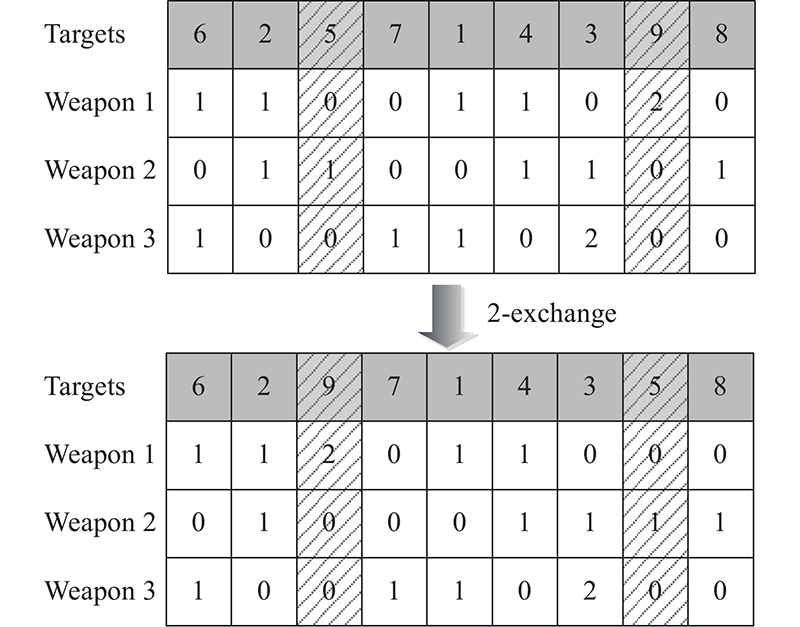
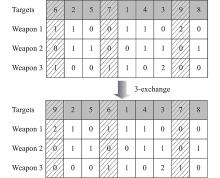
Fig 6
One possible case of 3-ex operator"
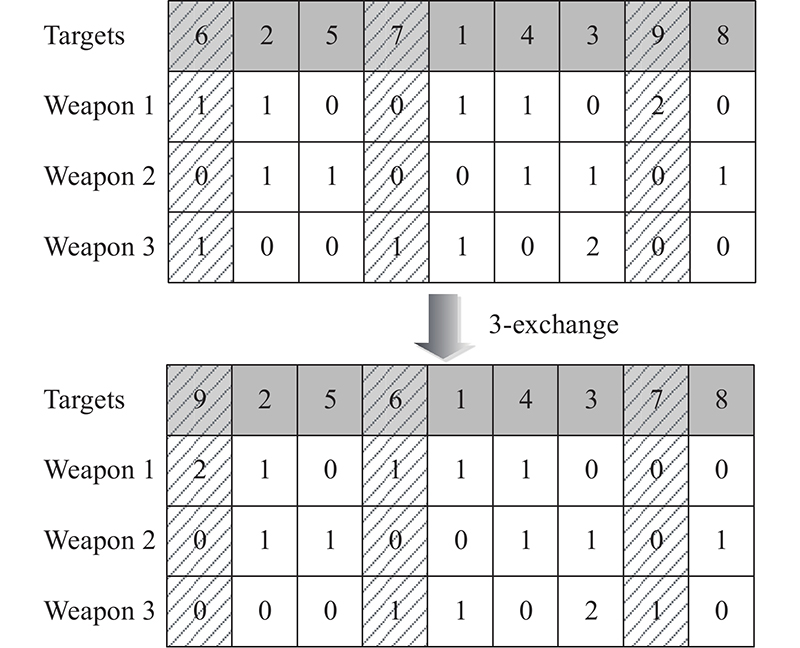

Fig 7
Illustration of RNW operator"
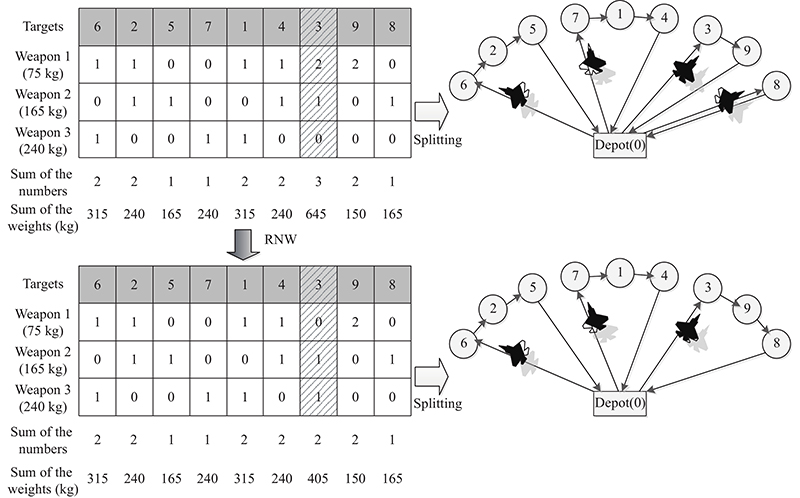

Fig 8
Illustration of procedure RCW operator"
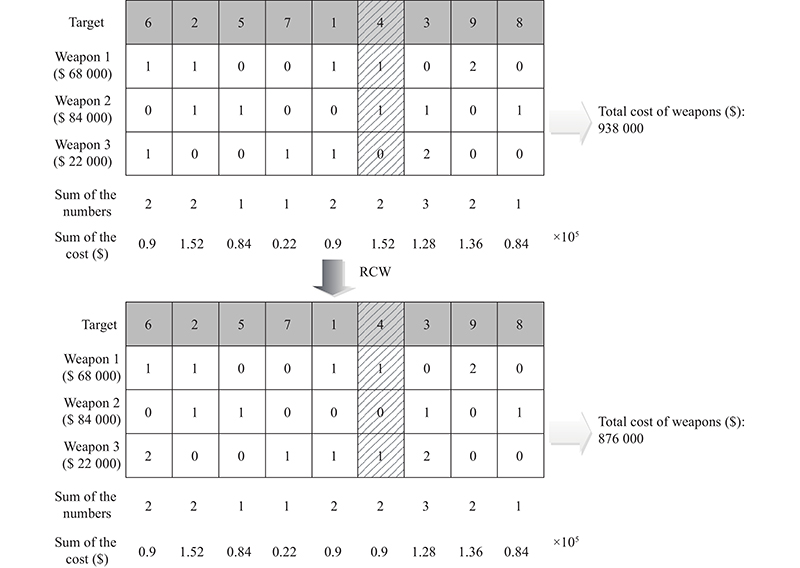

Fig 9
Illustration of procedure RWW operator"
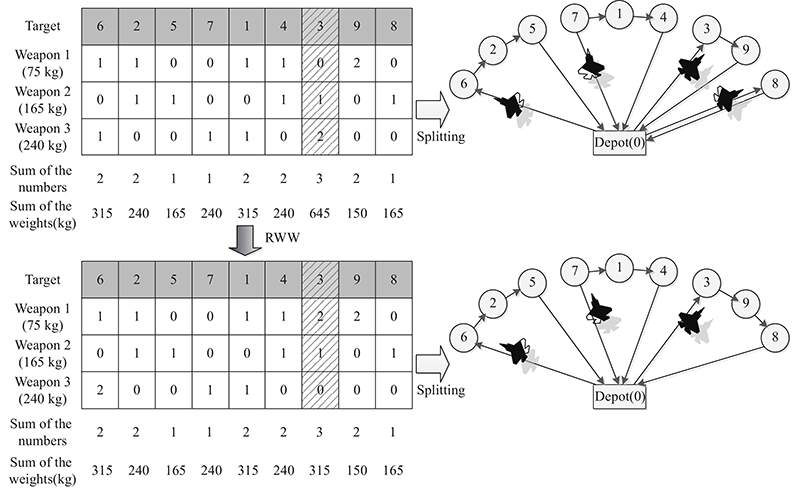

Fig 10
Illustration of procedure RM operator"
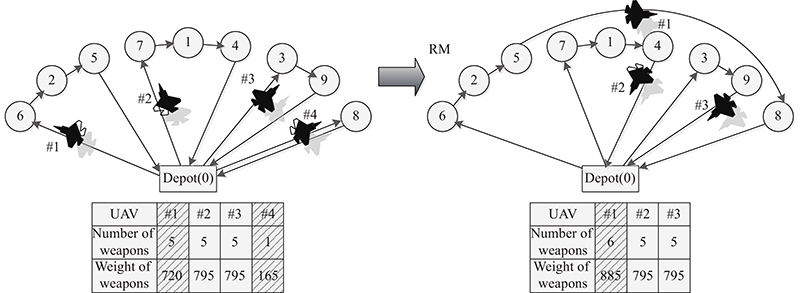
Table 1
Basic settings of UAVs and weapons"
| Name | Index | Parameter value | ||
| UAV | Payload capacity of the UAV/kg | 600, 900, 1200 | ||
| Number of hardpoints | 4, 6, 8 | |||
| Type of weapons | W1, W2 and W3 | |||
| Cruise speed/(km/h) | 180 | |||
| Weapon | W1 | Weight/kg | 75 | |
| Cost/$ thousand | 68 | |||
| W2 | Weight/kg | 165 | ||
| Cost/$ thousand | 84 | |||
| W3 | Weight/kg | 240 | ||
| Cost/$ thousand | 22 |
Table 2
Summary of experiments"
| Instance size | Number of targets | Region/km2 |
| Small | 10 and 20 | 300 × 300 |
| Medium | 50 | 500 × 500 |
| Large | 100 | 800 × 800 |
Table 3
Performance characteristics of CPLEX and P-ALNS tested using 10 targets instances"
| Armament | Number | Gap/% | CPLEX | P-ALNS | |||||
| Obj. Val. | Time/s | Obj. Val. | Initial solution | Time/s | Improvement/% | ||||
| Four hanging points & 600 kg payload capacity | 1 | 1.36 | 2424597.98 | 0.12 | 2457572.51 | 3888657.08 | 14.13 | 36.80 | |
| 2 | 0.59 | 2380102.02 | 1.92 | 2394144.62 | 3873176.37 | 14.84 | 38.19 | ||
| 3 | 1.46 | 2060957.84 | 0.20 | 2091047.82 | 3608727.74 | 13.65 | 42.06 | ||
| 4 | 1.75 | 2352257.91 | 0.44 | 2393422.42 | 3724640.19 | 14.83 | 35.74 | ||
| Four hanging points & 600 kg payload capacity | 5 | 1.59 | 2114529.56 | 0.65 | 2148150.58 | 3777908.04 | 14.32 | 43.14 | |
| 6 | 1.39 | 2243336.12 | 0.53 | 2274518.49 | 4068900.50 | 14.45 | 44.10 | ||
| 7 | 1.76 | 2155791.79 | 0.40 | 2193733.73 | 3751946.02 | 15.65 | 41.53 | ||
| 8 | 0.84 | 2141811.63 | 0.34 | 2159802.85 | 3806186.38 | 15.54 | 43.26 | ||
| 9 | 0.65 | 2041426.68 | 0.27 | 2054695.95 | 3776444.99 | 14.93 | 45.59 | ||
| 10 | 0.77 | 2360302.65 | 0.55 | 2378476.98 | 3923007.34 | 15.92 | 39.37 | ||
| Six hanging points & 900 kg payload capacity | 11 | 0.28 | 2409043.58 | 1.79 | 2415788.90 | 4878869.49 | 15.18 | 50.48 | |
| 12 | 0.15 | 2451521.48 | 0.22 | 2455198.76 | 4672567.67 | 15.70 | 47.46 | ||
| 13 | 1.27 | 2150123.74 | 0.20 | 2177430.31 | 4289204.62 | 14.47 | 49.23 | ||
| 14 | 0.44 | 2223192.75 | 1.43 | 2232974.80 | 4544061.43 | 15.04 | 50.86 | ||
| 15 | 1.98 | 2396833.35 | 2.06 | 2444290.65 | 4402794.64 | 14.96 | 44.48 | ||
| 16 | 0.51 | 2371673.97 | 0.21 | 2383769.51 | 4471151.19 | 15.44 | 46.69 | ||
| 17 | 1.74 | 2367222.82 | 0.17 | 2408412.50 | 4824156.59 | 14.04 | 50.08 | ||
| 18 | 4.24 | 2293715.92 | 0.12 | 2390969.47 | 4761927.64 | 13.68 | 49.79 | ||
| 19 | 0.81 | 2164985.48 | 0.14 | 2182521.86 | 4428984.09 | 13.78 | 50.72 | ||
| 20 | 0.64 | 2198422.64 | 0.64 | 2212492.54 | 4654435.57 | 13.24 | 52.46 | ||
| Eight hanging points & 1200 kg payload capacity | 21 | 1.83 | 2232777.94 | 0.62 | 2273637.78 | 4942157.64 | 13.45 | 54.00 | |
| 22 | 0.49 | 2170507.96 | 0.31 | 2181143.45 | 4903109.18 | 13.52 | 55.52 | ||
| 23 | 2.5 | 2133621.41 | 0.35 | 2186961.95 | 5173273.95 | 13.19 | 57.73 | ||
| 24 | 2.16 | 2322472.15 | 0.44 | 2372637.55 | 4834518.65 | 13.49 | 50.92 | ||
| 25 | 0.71 | 2169989.42 | 0.23 | 2185396.34 | 5112405.26 | 13.68 | 57.25 | ||
| 26 | 1.12 | 2297950.78 | 0.52 | 2323687.83 | 5536982.21 | 13.31 | 58.03 | ||
| 27 | 1.45 | 2210491.30 | 1.75 | 2242543.42 | 4830348.62 | 13.35 | 53.57 | ||
| 28 | 0.27 | 2466338.72 | 0.34 | 2472997.83 | 5262662.30 | 13.33 | 53.01 | ||
| 29 | 1.3 | 2318171.53 | 0.49 | 2348307.76 | 4953336.47 | 13.29 | 52.59 | ||
| 30 | 0.61 | 2451781.82 | 0.28 | 2466737.69 | 5111780.87 | 14.08 | 51.74 | ||
| Average | — | 1.22 | 0.59 | — | — | 14.28 | 48.21 | ||
Table 4
Performance characteristics of CPLEX and P-ALNS tested using 20 targets instances"
| Armament | Number | Gap/% | CPLEX | P-ALNS | |||||
| Obj.Val. | Time/s | Obj.Val. | Initial solution | Time/s | Improvement/% | ||||
| Four hanging points & 600 kg payload capacity | 31 | 3.35 | 4899610.22 | 3343.28 | 5063697.54 | 7492363.51 | 172.83 | 32.42 | |
| 32 | 0.50 | 5034765.67c | 7200.00 | 5059977.76 | 7952110.85 | 181.88 | 36.37 | ||
| 33 | 1.10 | 5520572.73 | 2101.08 | 5581197.55 | 8262242.54 | 174.34 | 32.45 | ||
| 34 | 0.68 | 4782554.74c | 7200.00 | 4814935.01 | 7740820.10 | 159.98 | 37.80 | ||
| 35 | 1.85 | 5126144.84 | 3342.66 | 5221043.14 | 8521157.63 | 181.46 | 38.73 | ||
| 36 | 1.58 | 4983406.04 | 4139.49 | 5062217.82 | 7714785.85 | 177.81 | 34.38 | ||
| 37 | 1.22 | 5426823.76 | 2861.28 | 5493187.76 | 8244558.53 | 202.44 | 33.37 | ||
| 38 | 1.01 | 4768546.48 | 3295.02 | 4816711.65 | 7385545.18 | 159.35 | 34.78 | ||
| 39 | 3.18 | 5082171.68 | 2296.35 | 5243736.55 | 8077279.46 | 214.01 | 35.08 | ||
| 40 | 3.80 | 4893166.56 | 2864.81 | 5079180.63 | 8007398.00 | 175.60 | 36.57 | ||
| Six hanging points & 900 kg payload capacity | 41 | 0.42 | 6072122.90c | 7200.00 | 6097756.98 | 10133896.72 | 169.87 | 39.83 | |
| 42 | 1.59 | 5169130.61 | 4139.63 | 5251331.52 | 9273408.90 | 331.76 | 43.37 | ||
| Six hanging points & 900 kg payload capacity | 43 | 3.06 | 6223474.21 | 4452.23 | 6413740.53 | 11126924.68 | 207.58 | 42.36 | |
| 44 | 1.09 | 5468838.52 | 2175.06 | 5528572.84 | 9717544.13 | 196.23 | 43.11 | ||
| 45 | 3.66 | 5439860.50 | 3658.69 | 5638837.13 | 9352402.83 | 186.67 | 39.71 | ||
| 46 | 2.45 | 5274467.03 | 3493.83 | 5403594.43 | 9749993.90 | 161.46 | 44.58 | ||
| 47 | 0.89 | 5374977.48c | 7200.00 | 5422746.29 | 9191694.26 | 155.84 | 41.00 | ||
| 48 | 1.86 | 6192449.97 | 2218.25 | 6307882.98 | 10540562.03 | 175.84 | 40.16 | ||
| 49 | 2.29 | 6257508.70 | 4313.64 | 6400498.98 | 10622605.75 | 165.88 | 39.75 | ||
| 50 | 0.99 | 6202262.45c | 7200.00 | 6263963.85 | 10172959.25 | 174.07 | 38.43 | ||
| Eight hanging points & 1200 kg payload capacity | 51 | 1.30 | 6308856.25 | 3009.60 | 6390566.83 | 12201417.94 | 160.00 | 47.62 | |
| 52 | 2.94 | 5480492.21 | 2080.21 | 5641612.05 | 11202576.31 | 155.18 | 49.64 | ||
| 53 | 0.78 | 6070380.20c | 7200.00 | 6117562.61 | 12239885.06 | 164.25 | 50.02 | ||
| 54 | 3.15 | 5522360.80 | 2815.72 | 5696050.07 | 11141702.42 | 157.08 | 48.88 | ||
| 55 | 3.18 | 5533082.06 | 3096.89 | 5709138.24 | 9902122.84 | 177.69 | 42.34 | ||
| 56 | 1.02 | 6512213.86 | 2760.13 | 6578654.03 | 11533613.36 | 152.47 | 42.96 | ||
| 57 | 4.07 | 5833734.84 | 4166.18 | 6071186.17 | 11812193.19 | 163.27 | 48.60 | ||
| 58 | 2.61 | 6443927.95 | 3942.82 | 6611908.41 | 11734979.34 | 159.43 | 43.66 | ||
| 59 | 2.00 | 5933455.78 | 3558.42 | 6052242.16 | 11705717.35 | 168.15 | 48.30 | ||
| 60 | 1.84 | 6010477.97 | 2740.77 | 6121263.88 | 11505725.93 | 162.27 | 46.80 | ||
| Average | — | 1.98 | 4002.20 | — | — | 178.16 | 41.10 | ||
Table 5
Performance characteristics of P-ALNS tested using 50 targets instances"
| Armament | Number | P-ALNS | |||
| Obj.Val. | Initial solution | Time/s | Improvement/% | ||
| Four hanging points & 600 kg payload capacity | 61 | 19639702.79 | 26418858.49 | 894.16 | 25.66 |
| 62 | 20226587.53 | 28091423.00 | 905.93 | 28.00 | |
| 63 | 19075602.57 | 29497875.83 | 827.38 | 35.33 | |
| 64 | 19562878.93 | 28270698.47 | 885.11 | 30.80 | |
| 65 | 21225258.16 | 33479351.74 | 968.09 | 36.60 | |
| 66 | 21245526.49 | 30937990.54 | 903.73 | 31.33 | |
| 67 | 19025215.37 | 30255708.29 | 951.10 | 37.12 | |
| 68 | 18279376.77 | 25863988.21 | 934.00 | 29.32 | |
| 69 | 21500859.25 | 32517817.92 | 921.50 | 33.88 | |
| 70 | 19837561.10 | 27110162.60 | 843.02 | 26.83 | |
| Six hanging points & 900 kg payload capacity | 71 | 23757260.36 | 38863692.78 | 864.34 | 38.87 |
| 72 | 23626293.40 | 45297246.03 | 839.71 | 47.84 | |
| 73 | 25086301.95 | 43649491.24 | 897.37 | 42.53 | |
| Six hanging points & 900 kg payload capacity | 74 | 23803380.80 | 40704101.47 | 957.38 | 41.52 |
| 75 | 24953042.70 | 44968659.67 | 960.44 | 44.51 | |
| 76 | 20252252.48 | 33375639.30 | 951.77 | 39.32 | |
| 77 | 21484026.19 | 36297375.83 | 947.17 | 40.81 | |
| 78 | 20961277.39 | 34038993.24 | 962.00 | 38.42 | |
| 79 | 21290151.48 | 38375687.63 | 965.33 | 44.52 | |
| 80 | 23262131.65 | 43412205.51 | 871.07 | 46.42 | |
| Eight hanging points & 1200 kg payload capacity | 81 | 26411759.24 | 51683908.96 | 916.99 | 48.90 |
| 82 | 25927669.48 | 49991044.91 | 839.00 | 48.14 | |
| 83 | 28654411.71 | 64790006.23 | 925.85 | 55.77 | |
| 84 | 25173709.93 | 53936381.18 | 834.87 | 53.33 | |
| 85 | 24846209.02 | 51853298.48 | 943.74 | 52.08 | |
| 86 | 26687074.82 | 54588557.26 | 941.93 | 51.11 | |
| 87 | 26893376.17 | 59066981.34 | 843.04 | 54.47 | |
| 88 | 24835318.46 | 47791483.44 | 839.85 | 48.03 | |
| 89 | 29422705.85 | 62766002.15 | 849.10 | 53.12 | |
| 90 | 27632781.35 | 63730779.37 | 848.59 | 56.64 | |
| Average | — | — | 901.12 | 42.04 | |
Table 6
Performance characteristics of P-ALNS tested using 100 targets instances"
| Armament | Number | P-ALNS | |||
| Obj.Val. | Initial solution | Time/s | Improvement/% | ||
| Four hanging points & 600 kg payload capacity | 91 | 56713612.00 | 77833338.02 | 3658.66 | 27.13 |
| 92 | 58819736.63 | 88335510.39 | 3939.26 | 33.41 | |
| 93 | 61499268.73 | 90584129.84 | 3620.54 | 32.11 | |
| 94 | 59363550.94 | 81817562.91 | 3480.32 | 27.44 | |
| 95 | 60015455.25 | 87037253.27 | 3427.54 | 31.05 | |
| 96 | 59031436.97 | 79440954.08 | 3691.88 | 25.69 | |
| 97 | 54676897.55 | 82662092.88 | 3331.97 | 33.85 | |
| 98 | 57308366.75 | 93759087.00 | 3532.63 | 38.88 | |
| 99 | 58273504.04 | 93494742.44 | 3337.27 | 37.67 | |
| 100 | 60034343.70 | 82882886.05 | 3913.52 | 27.57 | |
| Six hanging points & 900 kg payload capacity | 101 | 74474010.78 | 120333006.01 | 3994.62 | 38.11 |
| 102 | 70858242.62 | 129567870.06 | 3787.14 | 45.31 | |
| 103 | 63311816.71 | 117370935.19 | 3334.90 | 46.06 | |
| 104 | 63549955.83 | 105734877.09 | 3598.18 | 39.90 | |
| 105 | 80182413.87 | 134483508.76 | 3715.91 | 40.38 | |
| 106 | 60589994.73 | 101644904.13 | 3806.19 | 40.39 | |
| 107 | 74023035.54 | 123394701.99 | 3506.24 | 40.01 | |
| 108 | 72685374.15 | 139422975.33 | 3571.98 | 47.87 | |
| 109 | 68584173.73 | 131933825.44 | 3564.44 | 48.02 | |
| 110 | 70937380.62 | 127674074.42 | 3954.26 | 44.44 | |
| Eight hanging points & 1200 kg payload capacity | 111 | 71011557.80 | 138470904.86 | 3455.29 | 48.72 |
| Eight hanging points & 1200 kg payload capacity | 112 | 79348300.75 | 188831368.78 | 3335.35 | 57.98 |
| 113 | 87032222.17 | 174639693.52 | 3548.56 | 50.16 | |
| 114 | 78536295.79 | 155542205.60 | 3307.42 | 49.51 | |
| 115 | 79126976.77 | 169402740.94 | 3984.86 | 53.29 | |
| 116 | 81119272.13 | 162194167.94 | 3545.99 | 49.99 | |
| 117 | 80819186.75 | 191885864.20 | 3407.36 | 57.88 | |
| 118 | 89209526.06 | 177191089.51 | 3516.22 | 49.65 | |
| 119 | 78658940.98 | 166693102.07 | 3353.06 | 52.81 | |
| 120 | 84250485.60 | 163825165.08 | 3435.85 | 48.57 | |
| Average | — | — | 3588.58 | 42.13 | |
| 1 | SHETTY V K, SUDIT M, NAGI R Priority-based assignment and routing of a fleet of unmanned combat aerial vehicles. Computers & Operations Research, 2008, 35 (6): 1813- 1828. |
| 2 | GRECU D L, GONSALVES P G. Agent-based simulation environment for UCAV mission planning and execution. Proc. of the AIAA Guidance, Navigation, and Control Conference and Exhibit, 2000. DOI: 10.2514/6.2000-4481. |
| 3 | KARAMAN S, FRAZZOLI E Linear temporal logic vehicle routing with applications to multi-UAV mission planning. International Journal of Robust & Nonlinear Control, 2011, 21 (12): 1372- 1395. |
| 4 | LAMONT G B. UAV swarm mission planning development using evolutionary algorithms and parallel simulation-Part II SCI-195. https://www.semanticscholar.org/paper/UAV-Swarm-Mission-Planning-Development-Using-and-II-Lamont/b079cfbaf1a0783cbb26800033e3bf1fffc28be1?p2df=. |
| 5 | POHL A G, LAMONT G B Multi-objective UAV mission planning using evolutionary computation. Proc. of the Conference on Winter Simulation, 2008, 1268- 1279. |
| 6 | TIAN J, SHEN L C, ZHENG Y X Genetic algorithm based approach for multi-UAV cooperative reconnaissance mission planning problem. Lecture Notes in Computer Science, 2006, 4203, 101- 110. |
| 7 | EVERS L, BARROS A I, MONSUUR H, et al. UAV mission planning: from robust to agile. http://doi.org/10.1007/978-3-319-12075-1_1. |
| 8 | KOPEIKIN A N, PONDA S S, JOHNSON L B, et al Dynamic mission planning for communication control in multiple unmanned aircraft teams. Unmanned Systems, 2013, 1 (1): 41- 58. |
| 9 | WANG X L, WU J B, HUANG H B, et al Multiple tasks scheduling algorithm for UAV attacking in uncertain environment. Proc. of the International Conference on Systems and Informatics, 2012, 735- 739. |
| 10 | SONMEZOCAK E, KURT S. Optimum route planning and scheduling for unmanned aerial vehicles. Monterey: Naval Postgraduate School, 2008. |
| 11 | XU C F, DUAN H B, LIU F Chaotic artificial bee colony approach to uninhabited combat air vehicle path planning. Aerospaceence & Technology, 2010, 14 (8): 535- 541. |
| 12 | EDISON E, SHIMA T Integrated task assignment and path optimization for cooperating uninhabited aerial vehicles using genetic algorithms. Computers & Operations Research, 2011, 38 (1): 340- 356. |
| 13 | LIU Z, LUO Q, DING W, et al A task assignment algorithm for multiple aerial vehicles to attack targets with dynamic values. IEEE Trans. on Intelligent Transportation Systems, 2012, 14 (1): 236- 248. |
| 14 | XIA Y, BATTA R, NAGI R Controlling a fleet of unmanned aerial vehicles to collect uncertain information in a threat environment. The Journal of the Operations Research Society of America, 2017, 65 (3): 674- 692. |
| 15 | MUFALLI F, BATTA R, NAGI R Simultaneous sensor selection and routing of unmanned aerial vehicles for complex mission plans. Computers & Operations Research, 2012, 39 (11): 2787- 2799. |
| 16 |
EVERS L, DOLLEVOET T, BARROS A I, et al Robust UAV mission planning. Annals of Operations Research, 2014, 222 (1): 293- 315.
doi: 10.1007/s10479-012-1261-8 |
| 17 |
SEMIZ F, POLAT F Solving the area coverage problem with UAVs: a vehicle routing with time windows variation. Robotics and Autonomous Systems, 2020, 126, 103435.
doi: 10.1016/j.robot.2020.103435 |
| 18 | LIU H, LI X M, WU G H, et al An iterative two-phase optimization method based on divide and conquer framework for integrated scheduling of multiple UAV. IEEE Trans. on Intelligent Transportation Systems, 2020, 22 (9): 5926- 5938. |
| 19 |
DASDEMIR E, KOKSALAN M, OZTURK D T A flexible reference point-based multi-objective evolutionary algorithm: an application to the UAV route planning problem. Computers and Operations Research, 2020, 114, 104811.
doi: 10.1016/j.cor.2019.104811 |
| 20 |
LIU H, LI X M, FAN M F, et al An autonomous path planning method for unmanned aerial vehicle based on a tangent intersection and target guidance strategy. IEEE Trans. on Intelligent Transportation Systems, 2022, 23 (4): 3061- 3073.
doi: 10.1109/TITS.2020.3030444 |
| 21 | CHOWDHURY S, SHAHVARI O, MARUFUZZAMAN M, et al Drone routing and optimization for post-disaster inspection. Computers & Industrial Engineering, 2021, 159, 107495. |
| 22 |
NGUYEN M A, DANG G T H, HA M H, et al The min-cost parallel drone scheduling vehicle routing problem. European Journal of Operational Research, 2022, 299 (3): 910- 930.
doi: 10.1016/j.ejor.2021.07.008 |
| 23 |
SARICICEK I, AKKUS Y Unmanned aerial vehicle hub-location and routing for monitoring geographic borders. Applied Mathematical Modelling, 2015, 39 (14): 3939- 3953.
doi: 10.1016/j.apm.2014.12.010 |
| 24 | YAKICI E Solving location and routing problem for UAVs. Computers & Industrial Engineering, 2016, 102, 294- 301. |
| 25 |
MACRINA G, PUGLIESE L D P, GUERRIERO F, et al Drone-aided routing: a literature review. Transportation Research Part C: Emerging Technologies, 2020, 120, 102762.
doi: 10.1016/j.trc.2020.102762 |
| 26 | OTTO A, AGATZ N, CAMPBELL J, et al. Optimization approaches for civil applications of unmanned aerial vehicles (UAVs) or aerial drones: a survey. Networks, 2018, 72(4): 411-458. |
| 27 | SCHANZ M V The reaper harvest. Air Force Magazine, 2011, 94 (4): 36- 39. |
| 28 | BENO V, ADAMCIK J F Unmanned combat air vehicle: MQ-9 Reaper. Proc. of the International Conference of Scientific Paper AFASES, 2014, 22- 24. |
| 29 |
ROPKE S, PISINGER D An adaptive large neighborhood search heuristic for the pickup and delivery problem with time windows. Transportation Science, 2006, 40 (4): 455- 472.
doi: 10.1287/trsc.1050.0135 |
| 30 |
LAPORTE G, MUSMANNO R, VOCATURO F An adaptive large neighbourhood search heuristic for the capacitated arc-routing problem with stochastic demands. Transportation Science, 2010, 44 (1): 125- 135.
doi: 10.1287/trsc.1090.0290 |
| 31 | LEI H T, LAPORTE G, GUO B The capacitated vehicle routing problem with stochastic demands and time windows. Computers & Operations Research, 2011, 38 (12): 1775- 1783. |
| 32 |
DAYARIAN I, CRAINIC T G, GENDREAU M, et al An adaptive large-neighborhood search heuristic for a multi-period vehicle routing problem. Transportation Research Part E: Logistics and Transportation Review, 2016, 95, 95- 123.
doi: 10.1016/j.tre.2016.09.004 |
| 33 | ZHOU T R, ZHANG J M, SHI J M, et al Multidepot UAV routing problem with weapon configuration and time window. Journal of Advanced Transportation, 2018, 2018, 7318207. |
| 34 | WANG X P, TANG L X A population-based variable neighborhood search for the single machine total weighted tardiness problem. Computers & Operations Research, 2009, 36 (6): 2105- 2110. |
| 35 | LEI D M Population-based neighborhood search for job shop scheduling with interval processing time. Computers & Industrial Engineering, 2011, 61 (4): 1200- 1208. |
| 36 |
LIU S G A hybrid population heuristic for the heterogeneous vehicle routing problems. Transportation Research Part E: Logistics and Transportation Review, 2013, 54, 67- 78.
doi: 10.1016/j.tre.2013.03.010 |
| 37 |
SAVELSBERGH M W P An efficient implementation of local search algorithms for constrained routing problems. European Journal of Operational Research, 1990, 47 (1): 75- 85.
doi: 10.1016/0377-2217(90)90091-O |
| [1] | Lei HU, Boqi XI, Guoxing YI, Hui ZHAO, Jiapeng ZHONG. A multiple heterogeneous UAVs reconnaissance mission planning and re-planning algorithm [J]. Journal of Systems Engineering and Electronics, 2022, 33(6): 1190-1207. |
| [2] | Honghong ZHANG, Xusheng GAN, Shuangfeng LI, Zhiyuan CHEN. UAV safe route planning based on PSO-BAS algorithm [J]. Journal of Systems Engineering and Electronics, 2022, 33(5): 1151-1160. |
| [3] | Guan WANG, Yufeng ZHAN, Yuanqing XIA, Liping YAN. Distributed point-to-point routing method for tasks in cloud control systems [J]. Journal of Systems Engineering and Electronics, 2022, 33(4): 792-804. |
| [4] | Naikang YU, Bin QIAN, Rong HU, Yuwang CHEN, Ling WANG. Solving open vehicle problem with time window by hybrid column generation algorithm [J]. Journal of Systems Engineering and Electronics, 2022, 33(4): 997-1009. |
| [5] | Jinqiang HU, Husheng WU, Renjun ZHAN, Rafik MENASSEL, Xuanwu ZHOU. Self-organized search-attack mission planning for UAV swarm based on wolf pack hunting behavior [J]. Journal of Systems Engineering and Electronics, 2021, 32(6): 1463-1476. |
| [6] | Yindong SHEN, Liwen PENG, Jingpeng LI. An improved estimation of distribution algorithm for multi-compartment electric vehicle routing problem [J]. Journal of Systems Engineering and Electronics, 2021, 32(2): 365-379. |
| [7] | Jiaming ZHANG, Zhong LIU, Jianmai SHI, Chao CHEN. Weapon configuration, allocation and route planning with time windows for multiple unmanned combat air vehicles [J]. Journal of Systems Engineering and Electronics, 2018, 29(5): 953-968. |
| [8] | Yuxing MAO, Huiyuan ZHAO, Dongmei YAN. Weak node protection to maximize the lifetime of wireless sensor networks [J]. Journal of Systems Engineering and Electronics, 2018, 29(4): 693-706. |
| [9] | Ye DENG, Wanhong ZHU, Hongwei LI, Yonghui ZHENG. Multi-type ant system algorithm for the time dependent vehicle routing problem with time windows [J]. Journal of Systems Engineering and Electronics, 2018, 29(3): 625-638. |
| [10] | Jiting Li, Sheng Zhang, Xiaolu Liu, and Renjie He. Multi-objective evolutionary optimization for geostationary orbit satellite mission planning [J]. Systems Engineering and Electronics, 2017, 28(5): 934-945. |
| [11] | Xiaoxuan Hu, Yanhong Liu, and Guoqiang Wang. Optimal search for moving targets with sensing capabilities using multiple UAVs [J]. Systems Engineering and Electronics, 2017, 28(3): 526-535. |
| [12] | Huijiao Bu, Jin Zhang, and Yazhong Luo. Space station short-term mission planning using ontology modelling and time iteration [J]. Journal of Systems Engineering and Electronics, 2016, 27(2): 407-421. |
| [13] | Haitao Yuan, Jing Bi, and Bohu Li. Workload-aware request routing in cloud data center using software-defined networking [J]. Journal of Systems Engineering and Electronics, 2015, 26(1): 151-. |
| [14] | Huicheng Hao, Wei Jiang, and Yijun Li. Improved algorithms to plan missions for agile earth observation satellites [J]. Journal of Systems Engineering and Electronics, 2014, 25(5): 811-821. |
| [15] | Pei Wang, Gerhard Reinelt, and Yuejin Tan. Self-adaptive large neighborhood search algorithm for parallel machine scheduling problems [J]. Journal of Systems Engineering and Electronics, 2012, 23(2): 208-215. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||