
Journal of Systems Engineering and Electronics ›› 2023, Vol. 34 ›› Issue (2): 469-478.doi: 10.23919/JSEE.2023.000044
• CONTROL THEORY AND APPLICATION • Previous Articles
Chengwei PAN1,2( ), Xia LIU3(), Yong CHEN1,2,*(), Meng LI1,2()
), Xia LIU3(), Yong CHEN1,2,*(), Meng LI1,2()
Received:2021-07-30
Online:2023-04-18
Published:2023-04-18
Contact:
Yong CHEN
E-mail:cwpan_qy@163.com;xliu_uestc@yahoo.com;ychencd@uestc.edu.cn;Lmengxhu@163.com
About author:Supported by:Chengwei PAN, Xia LIU, Yong CHEN, Meng LI. Finite-time fault-tolerant control of teleoperating cyber physical system against faults[J]. Journal of Systems Engineering and Electronics, 2023, 34(2): 469-478.
Add to citation manager EndNote|Reference Manager|ProCite|BibTeX|RefWorks
Fig 1
Control structure of the TCPS"
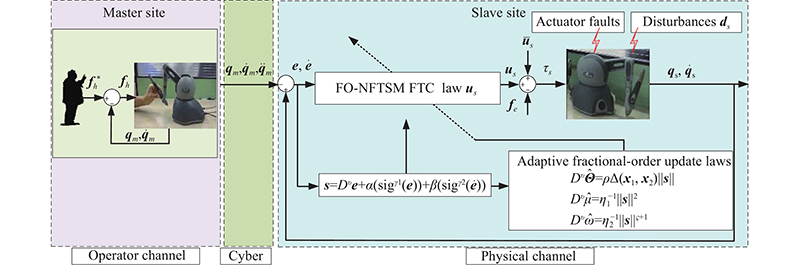
Fig 2
Position tracking error under the proposed method with different fractional orders"
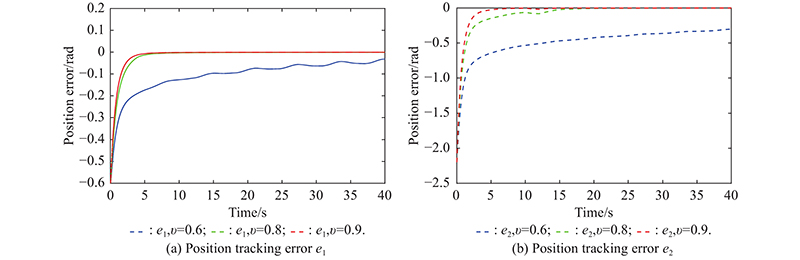
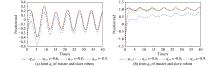
Fig 3
Position tracking under the proposed method with different fractional orders"
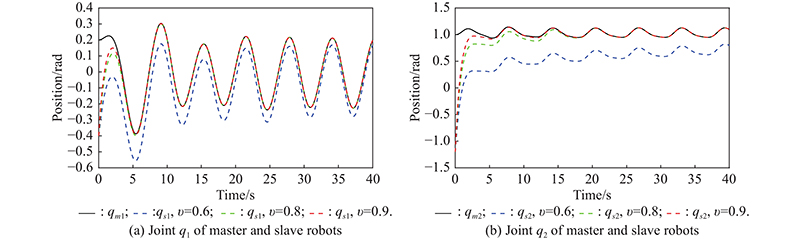

Fig 4
Control input under the proposed method with different fractional orders"
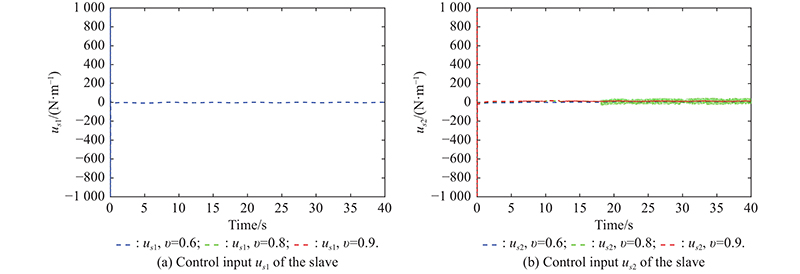
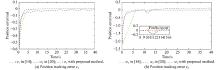
Fig 5
Position tracking error under different methods"
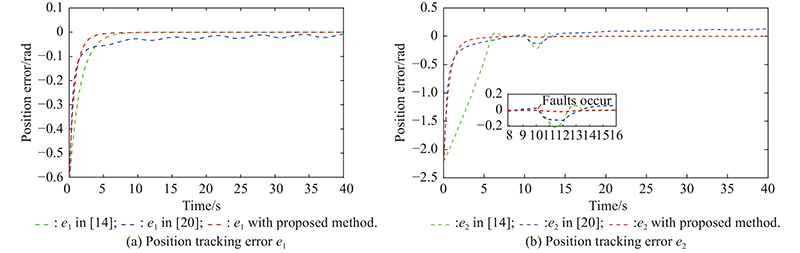

Fig 6
Position tracking under different methods"
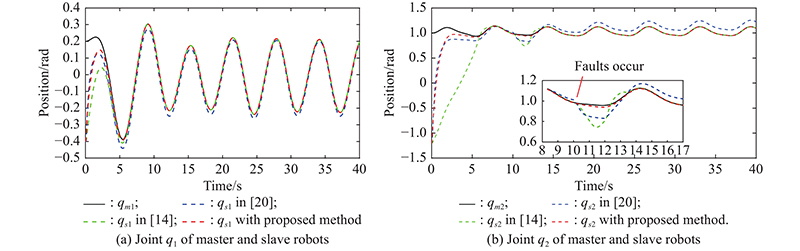

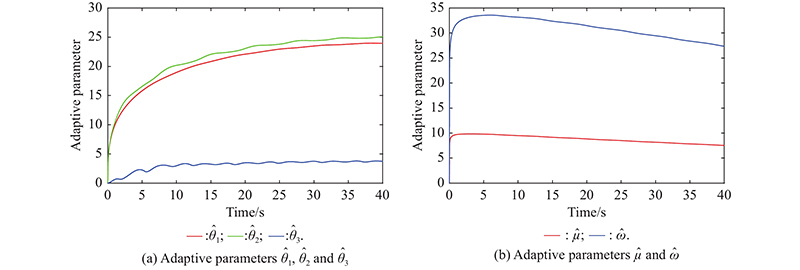
Fig 7
Adaptive fractional-order update parameters under the proposed method"
| 1 |
CHEN Z, HUANG F H, YANG C N, et al Adaptive fuzzy backstepping control for stable nonlinear bilateral teleoperation manipulators with enhanced transparency performance. IEEE Trans. on Industrial Electronics, 2020, 67 (1): 746- 756.
doi: 10.1109/TIE.2019.2898587 |
| 2 |
LI B Q, LAN T Y, ZHAO Y Y, et al Open-loop and closed-loop Dα-type iterative learning control for fractional-order linear multi-agent systems with state-delays . Journal of Systems Engineering and Electronics, 2021, 32 (1): 197- 208.
doi: 10.23919/JSEE.2021.000017 |
| 3 |
VAN M, GE S Z S, REN H L Finite time fault tolerant control for robot manipulators using time delay estimation and continuous nonsingular fast terminal sliding mode control. IEEE Trans. on Cybernetics, 2017, 47 (7): 1681- 1693.
doi: 10.1109/TCYB.2016.2555307 |
| 4 |
ALLERHAND L I, SHAKED U Robust switching-based fault tolerant control. IEEE Trans. on Automatic Control, 2015, 60 (8): 2272- 2276.
doi: 10.1109/TAC.2014.2375752 |
| 5 |
CHEN G, SONG Y D, LEWIS F L Distributed fault-tolerant control of networked uncertain Euler-Lagrange systems under actuator faults. IEEE Trans. on Cybernetics, 2017, 47 (7): 1706- 1718.
doi: 10.1109/TCYB.2016.2555339 |
| 6 | CAO Y, SONG Y D Adaptive PID-like fault tolerant control for robot manipulators with given performance specifications. International Journal of Control, 2018, 93 (3): 377- 386. |
| 7 |
VAN M, MAVROVOUNIOTIS M, GE S S An adaptive back-stepping nonsingular fast terminal sliding mode control for robust fault tolerant control of robot manipulators. IEEE Trans. on Systems, Man, and Cybernetics: Systems, 2019, 49 (7): 1448- 1458.
doi: 10.1109/TSMC.2017.2782246 |
| 8 |
BU N, PANG J X, DENG M C Robust fault tolerant tracking control for the multi-joint manipulator based on operator theory. Journal of the Franklin Institute, 2020, 357 (5): 2696- 2714.
doi: 10.1016/j.jfranklin.2019.11.081 |
| 9 |
HU Q L, SHAO X D, GUO L Adaptive fault-tolerant attitude tracking control of spacecraft with prescribed performance. IEEE/ASME Trans. on Mechatronics, 2018, 23 (1): 331- 341.
doi: 10.1109/TMECH.2017.2775626 |
| 10 |
DING S H, LI S H Second-order sliding mode controller design subject to mismatched term. Automatica, 2017, 77, 388- 392.
doi: 10.1016/j.automatica.2016.07.038 |
| 11 |
YANG Y N, YAN Y Backstepping sliding mode control for uncertain strict-feedback nonlinear systems using neural-network-based adaptive gain scheduling. Journal of Systems Engineering and Electronics, 2018, 29 (3): 580- 586.
doi: 10.21629/JSEE.2018.03.15 |
| 12 |
WANG H, MAN Z H, KONG H F, et al Design and implementation of adaptive terminal sliding mode control on a steer-by-wire equipped road vehicle. IEEE Trans. on Industrial Electronics, 2016, 63 (9): 5774- 5785.
doi: 10.1109/TIE.2016.2573239 |
| 13 |
FENG Y, YU X H, MAN Z H Nonsingular terminal sliding mode control of rigid manipulators. Automatica, 2002, 38 (12): 2159- 2167.
doi: 10.1016/S0005-1098(02)00147-4 |
| 14 | XU S S D, CHEN C C, WU Z L Study of nonsingular fast terminal sliding-mode fault-tolerant control. IEEE Trans. on Industrial Electronics, 2015, 62 (6): 3906- 3913. |
| 15 |
LEE J Y, CHANG P H, JIN M L Adaptive integral sliding mode control with time-delay estimation for robot manipulators. IEEE Trans. on Industrial Electronics, 2017, 64 (8): 6796- 6804.
doi: 10.1109/TIE.2017.2698416 |
| 16 |
MOGHADDAM T V, NIKRAVESH S K Y, KHOSRAVI M A Constrained sliding mode control of nonlinear fractional order input affine systems. Journal of Systems Engineering and Electronics, 2019, 30 (5): 995- 1006.
doi: 10.21629/JSEE.2019.05.16 |
| 17 |
SONG S, ZHANG B Y, XIA J W, et al Adaptive backstepping hybrid fuzzy sliding mode control for uncertain fractional-order nonlinear systems based on finite-time scheme. IEEE Trans. on Systems, Man, and Cybernetics: Systems, 2020, 50 (4): 1559- 1569.
doi: 10.1109/TSMC.2018.2877042 |
| 18 | DADRAS S, MOMENI H R Fractional terminal sliding mode control design for a class of dynamical systems with uncertainty. Communications in Nonlinear Science & Numerical Simulation, 2012, 17 (1): 367- 377. |
| 19 | NOJAVANZADEH D Y, BADAMCHIZADEH M Adaptive fractional-order non-singular fast terminal sliding mode control for robot manipulators. IET Control Theory & Applications, 2016, 10 (13): 1565- 1572. |
| 20 |
WANG J, ZHOU Y D, BAO Y L, et al Trajectory tracking control using fractional-order terminal sliding mode control with sliding perturbation observer for a 7-DOF robot manipulator. IEEE/ASME Trans. on Mechatronics, 2020, 25 (4): 1886- 1893.
doi: 10.1109/TMECH.2020.2992676 |
| 21 |
PHAM V T, CUONG H M, DONG H Q, et al Adaptive fractional-order fast terminal sliding mode with fault-tolerant control for underactuated mechanical systems: application to tower cranes. Automation in Construction, 2021, 123, 103533.
doi: 10.1016/j.autcon.2020.103533 |
| 22 | YU Z Q, ZHANG Y M, JIANG B, et al. Fractional-order adaptive fault-tolerant synchronization tracking control of networked fixed-wing UAVs against actuator-sensor faults via intelligent learning mechanism. IEEE Trans. on Neural Networks and Learning Systems, 2021, 32(12): 5539−5553. |
| 23 | PODLUBNY I. Fractional differential equations. New York: Academic Press, 1999. |
| 24 | LI Y X, WANG Q Y, TONG S C Fuzzy adaptive fault-tolerant control of fractional-order nonlinear systems. IEEE Trans. on Systems, Man, and Cybernetics: Systems, 2021, 51 (3): 1372- 1379. |
| 25 |
LI Y, CHEN Y Q, PODLUBNY I Mittag–leffler stability of fractional order nonlinear dynamic systems. Automatica, 2009, 45 (8): 1965- 1969.
doi: 10.1016/j.automatica.2009.04.003 |
| 26 |
MOHAMMADI A, TAVAKOLI M, MARQUEZ H J, et al Nonlinear disturbance observer design for robotic manipulators. Control Engineering Practice, 2013, 21 (3): 253- 267.
doi: 10.1016/j.conengprac.2012.10.008 |
| [1] | Steven Xianchuan DING, Linlin LI, Bin JIANG. Unified control and detection framework and its applications: a review, some new results, and future perspectives [J]. Journal of Systems Engineering and Electronics, 2021, 32(5): 995-1013. |
| [2] | Sader MALIKA, Fuyong WANG, Zhongxin LIU, Zengqiang CHEN. Distributed fuzzy fault-tolerant consensus of leader-follower multi-agent systems with mismatched uncertainties [J]. Journal of Systems Engineering and Electronics, 2021, 32(5): 1031-1040. |
| [3] | Ziquan YU, Youmin ZHANG, Bin JIANG. PID-type fault-tolerant prescribed performance control of fixed-wing UAV [J]. Journal of Systems Engineering and Electronics, 2021, 32(5): 1053-1061. |
| [4] | Ri Liu, Xiuxia Sun, Wenhan Dong, and Dong Wang. Finite-time adaptive sliding mode control for heavyweight airdrop operations [J]. Systems Engineering and Electronics, 2017, 28(2): 338-346. |
| [5] | Yong Guo, Shenmin Song, and Liwei Deng. Finite-time coordination control for formation flying spacecraft [J]. Journal of Systems Engineering and Electronics, 2014, 25(5): 859-867. |
| [6] | Haibin Sun, Shihua Li, and Changyin Sun. Adaptive fault-tolerant controller design for airbreathing hypersonic vehicle with input saturation [J]. Journal of Systems Engineering and Electronics, 2013, 24(3): 488-. |
| [7] | Yufei Xu, Bin Jiang, Zhifeng Gao, and Ke Zhang. Fault tolerant control for near space vehicle: a survey and some new results [J]. Journal of Systems Engineering and Electronics, 2011, 22(1): 88-94. |
| [8] | Ying Yang1,2,?,Junmin Li1,and Guopei Chen2. Finite-time stability and stabilization of Markovian switching stochastic systems with impulsive effects [J]. Journal of Systems Engineering and Electronics, 2010, 21(2): 254-260. |
| [9] | Huo Zhihong & Fang Huajing. Research on robust fault-tolerant control for networked control system with packet dropout [J]. Journal of Systems Engineering and Electronics, 2007, 18(1): 76-82. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||