
Journal of Systems Engineering and Electronics ›› 2026, Vol. 37 ›› Issue (1): 45-63.doi: 10.23919/JSEE.2026.000025
• PERCEPTION, CONTROL, AND DECISION-MAKING OF EMBODIED INTELLIGENT SYSTEMS • Previous Articles Next Articles
Guangwei WANG1,2,3( ), Le YANG4(), Zhikun TAN1,2(), Yichen LI1,2(), Wenbin YU1,2,*()
), Le YANG4(), Zhikun TAN1,2(), Yichen LI1,2(), Wenbin YU1,2,*()
Received:2025-12-12
Online:2026-02-18
Published:2026-03-09
Contact:
Wenbin YU
E-mail:ray7772008@163.com;anti_i@163.com;zhikuntan@sjtu.edu.cn;liyichensjtu@sjtu.edu.cn;yuwenbin@sjtu.edu.cn
About author:Supported by:Guangwei WANG, Le YANG, Zhikun TAN, Yichen LI, Wenbin YU. Hybrid path planning for USVs using improved A* and DWA[J]. Journal of Systems Engineering and Electronics, 2026, 37(1): 45-63.
Add to citation manager EndNote|Reference Manager|ProCite|BibTeX|RefWorks

Fig 1
Path nodes classification and optimization"
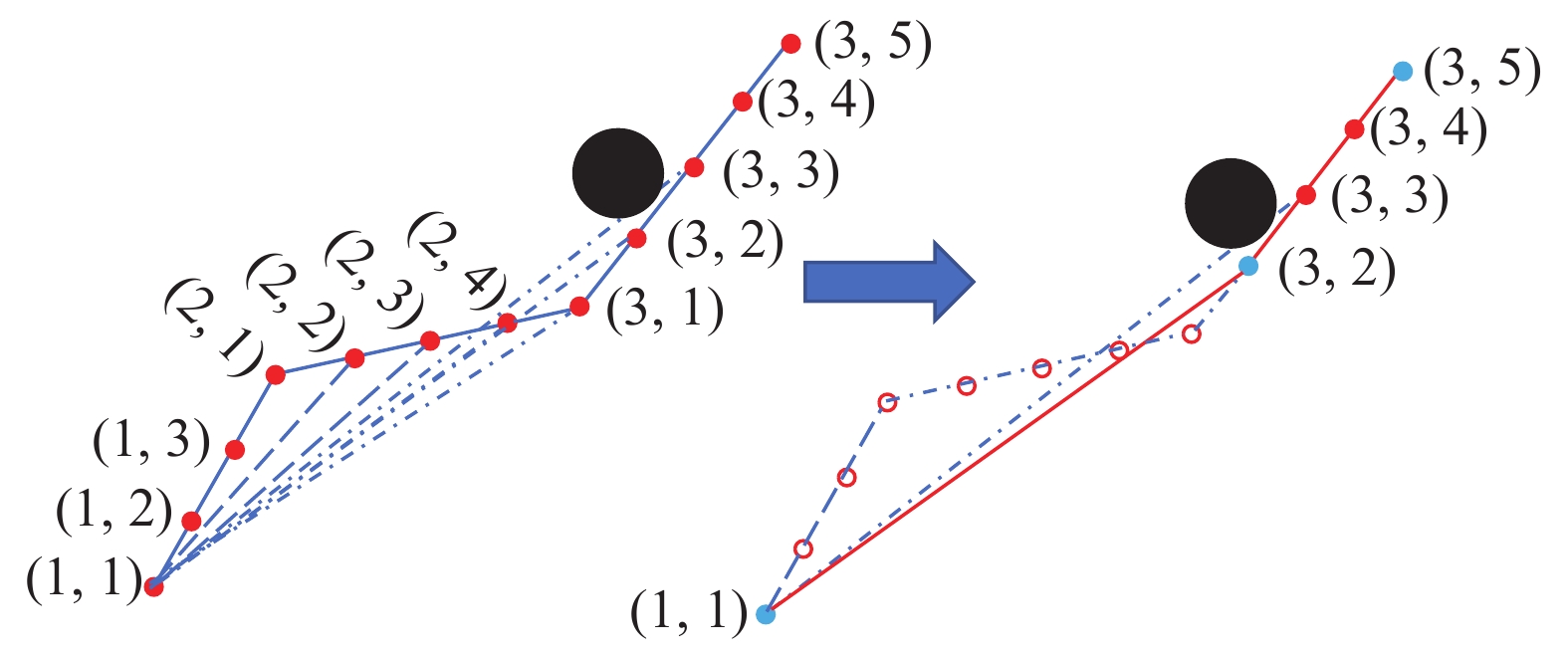

Fig 2
Static obstacle avoidance of USV"
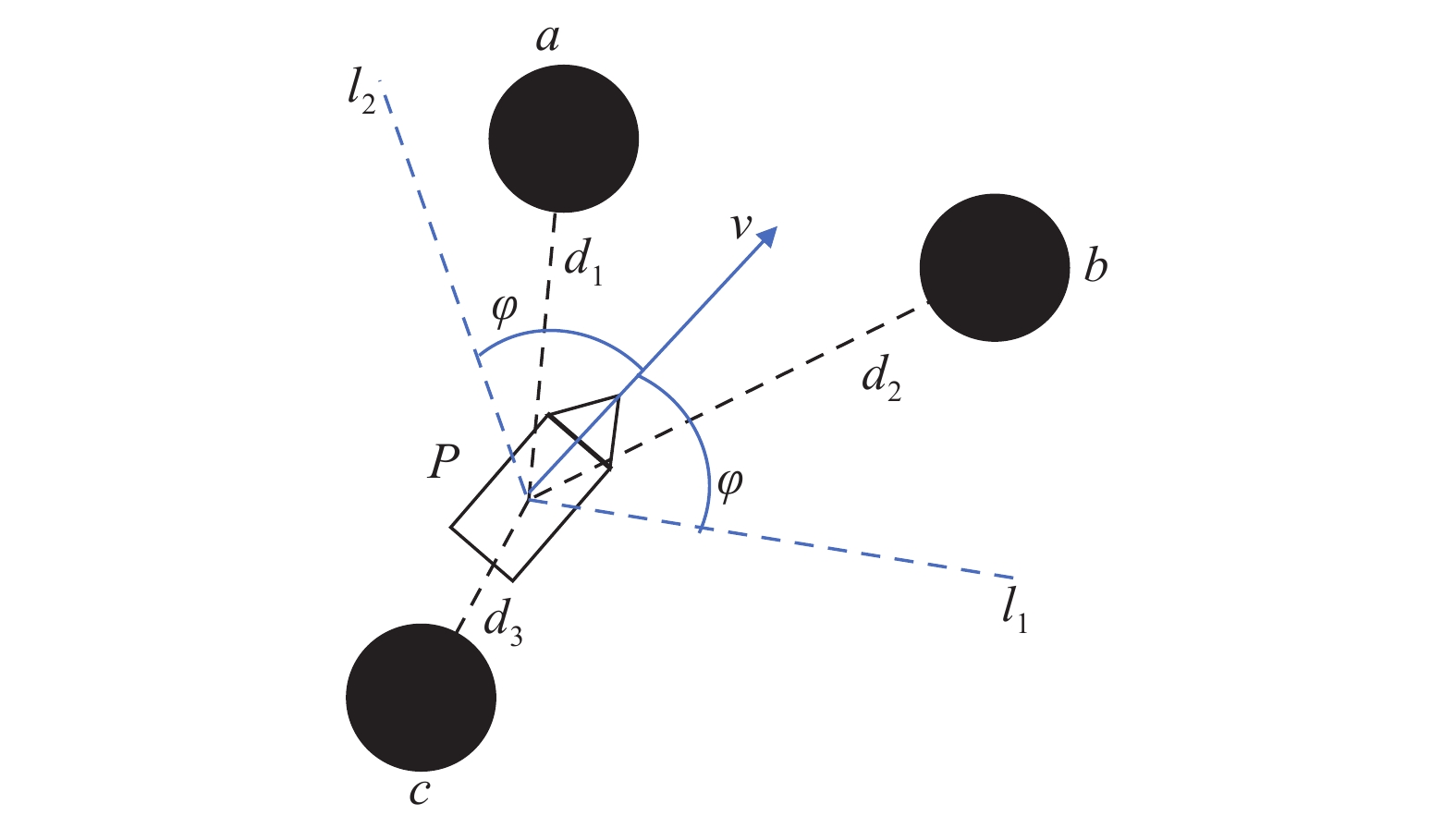

Fig 3
Comparison of obstacle avoidance paths of the traditional DWA"
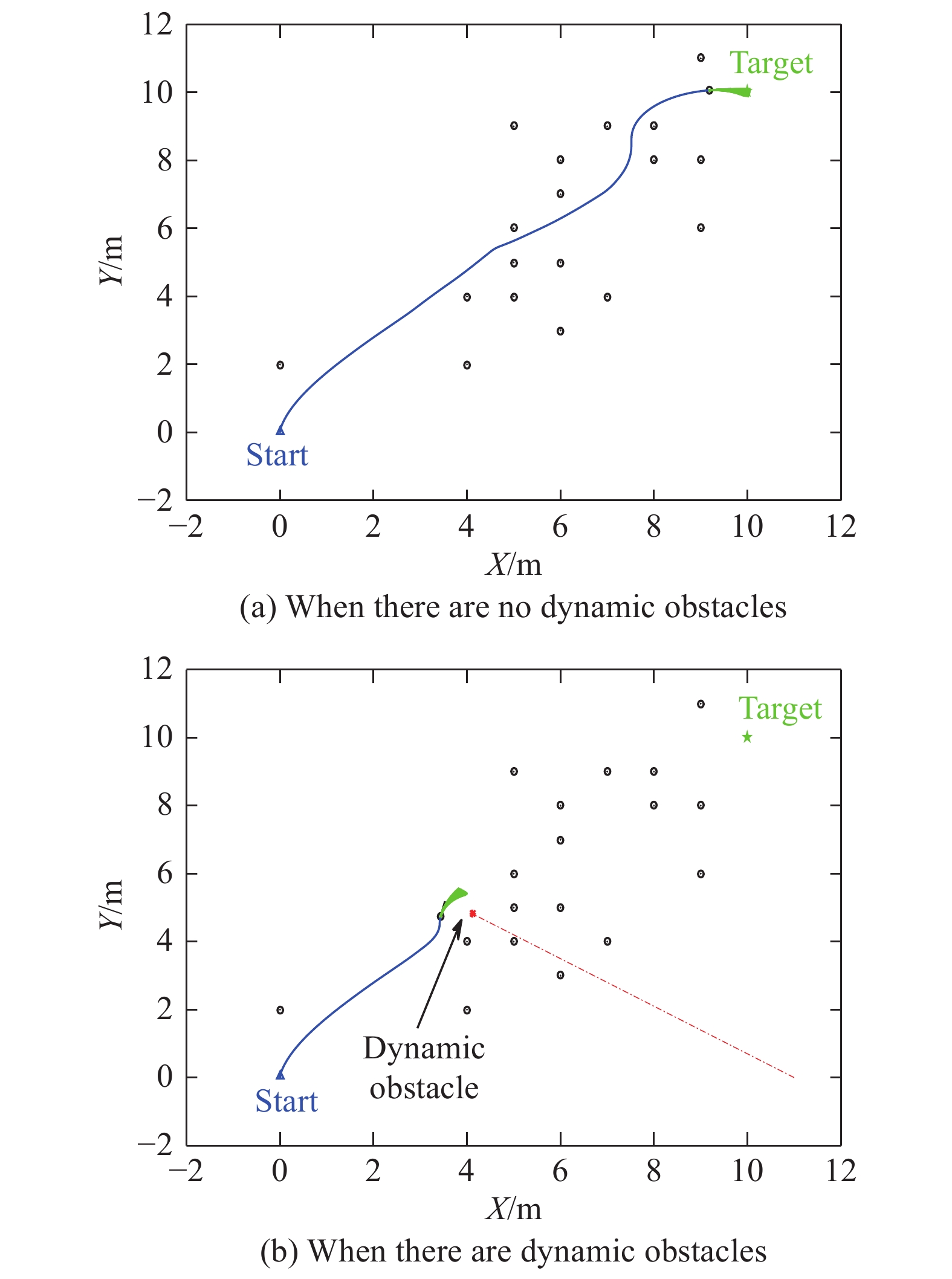
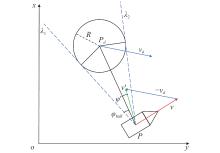
Fig 4
Schematic diagram of VO algorithm"
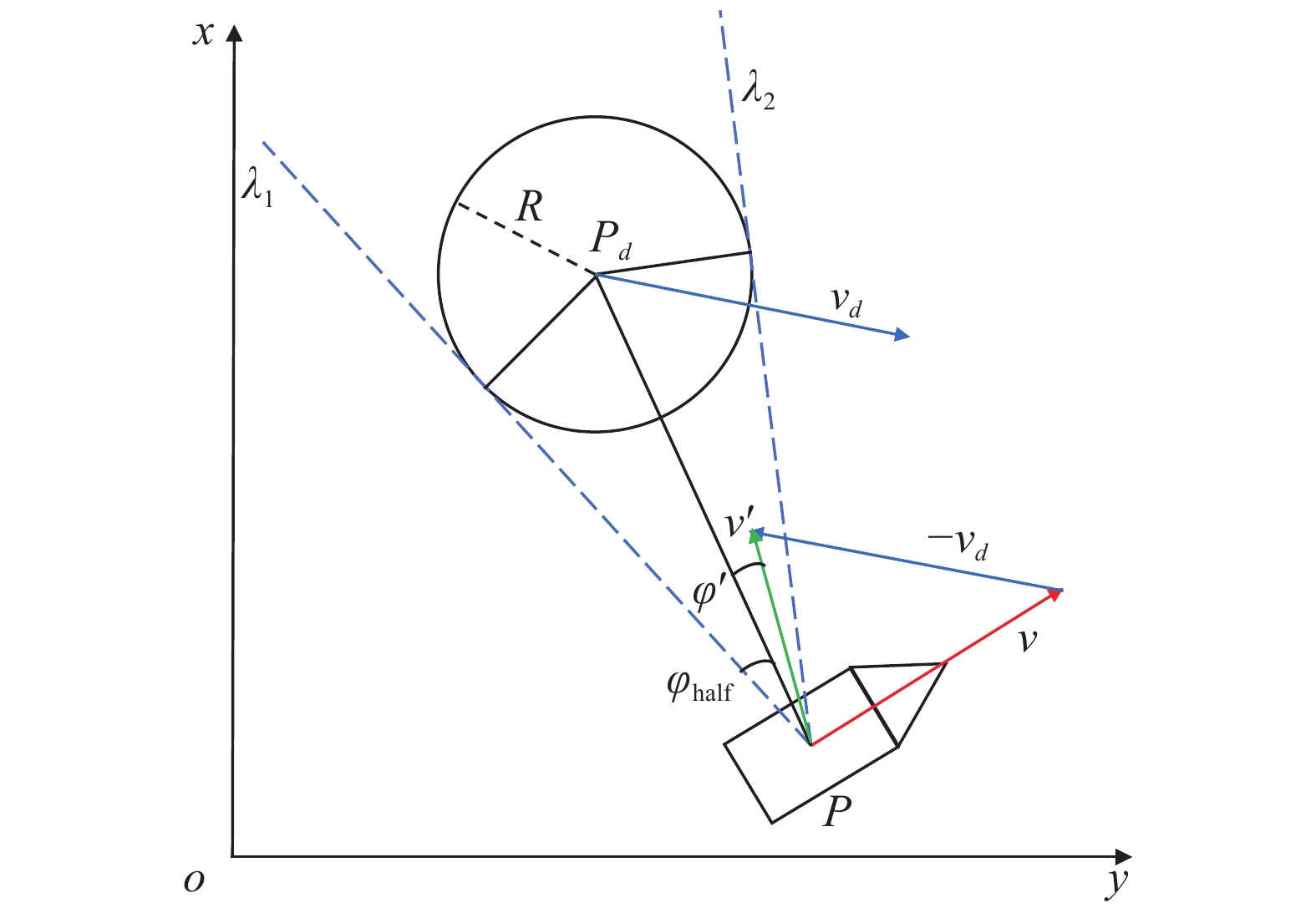

Fig 5
Schematic diagram of USV starting dilemma"
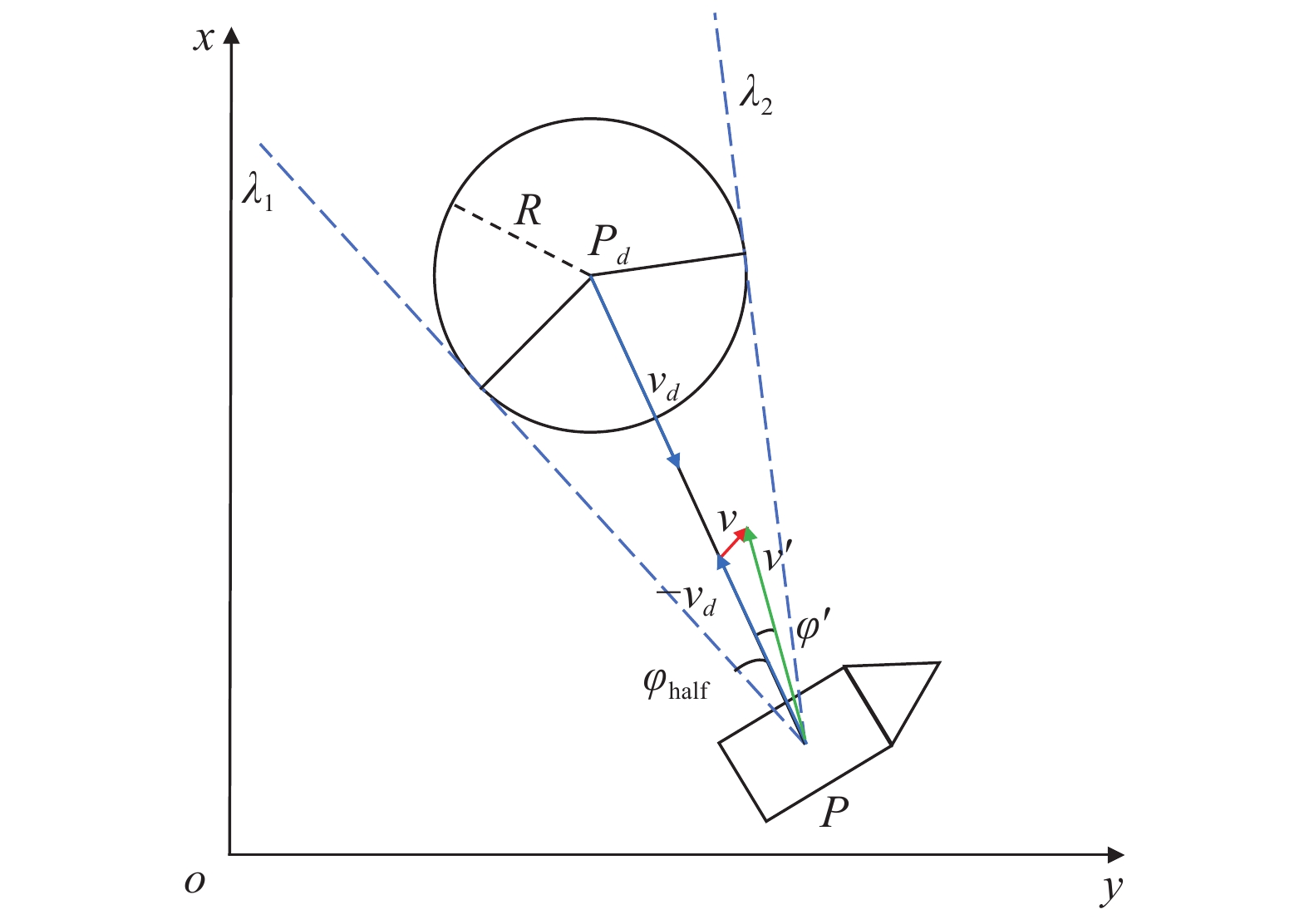
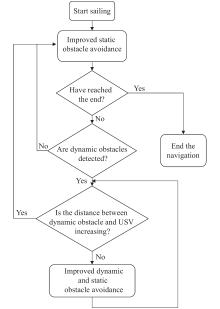
Fig 6
Flow chart of obstacle avoidance of USV based on improved DWA"
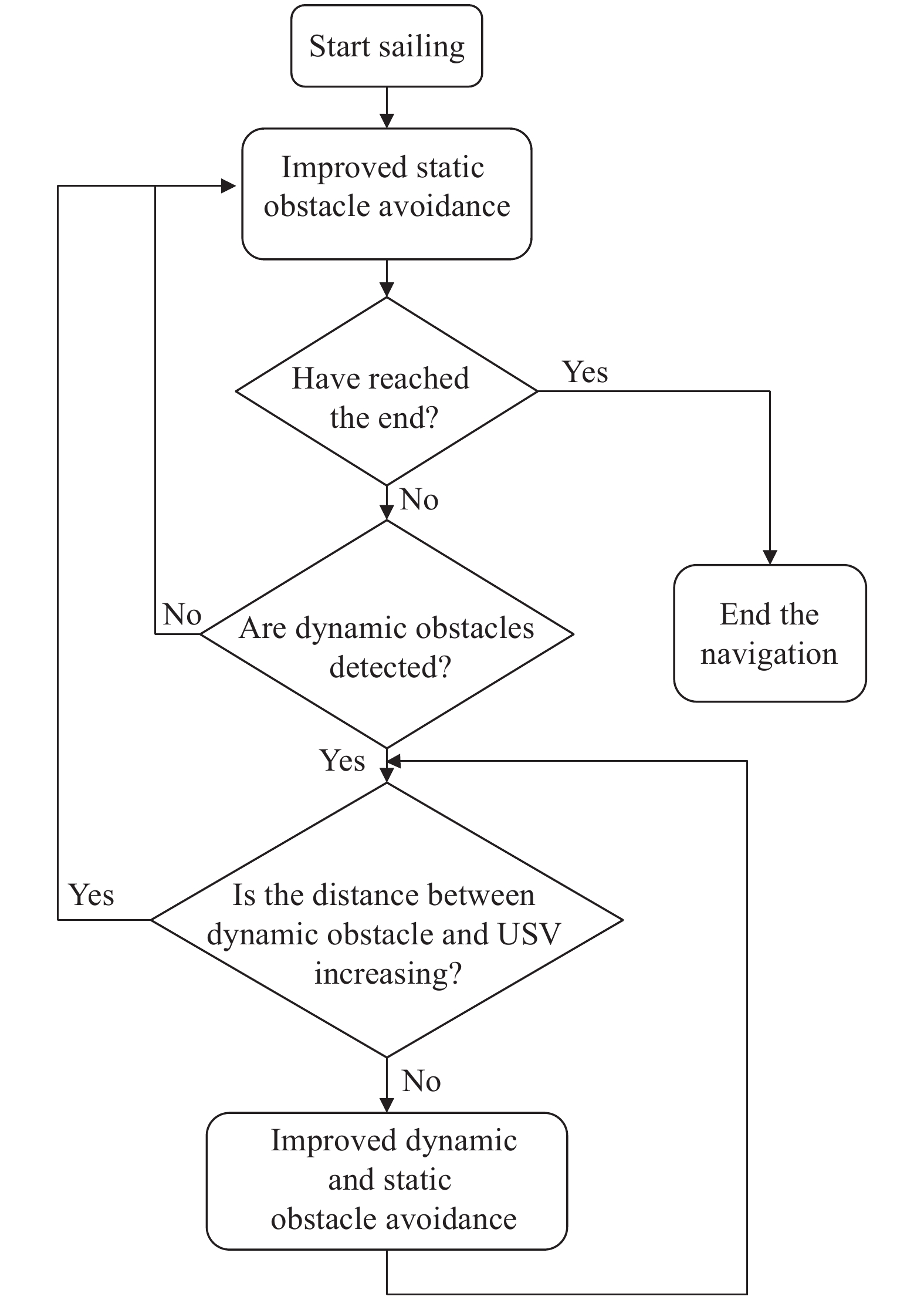

Fig 7
USV follows global path"
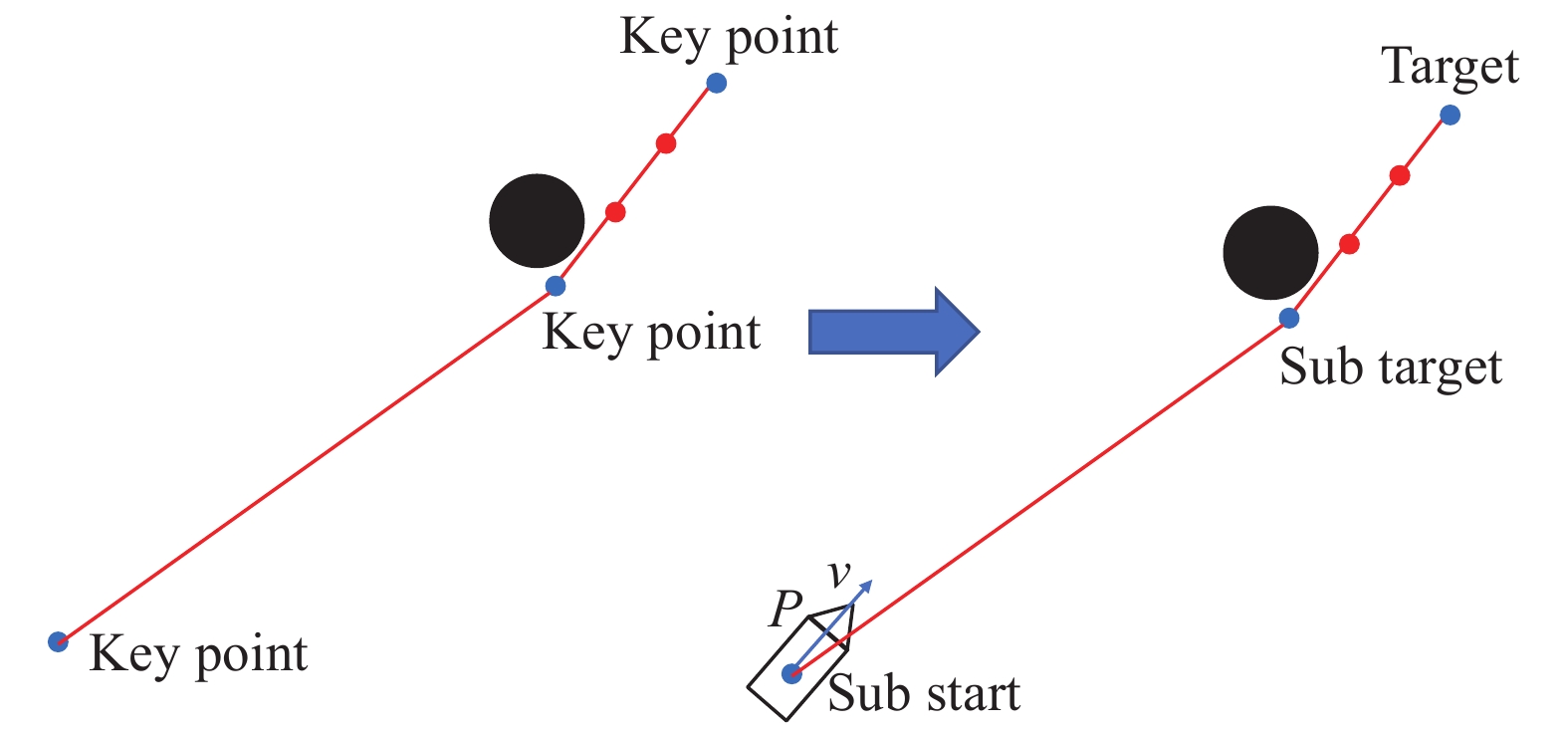
Fig 8
Replace sub target point"
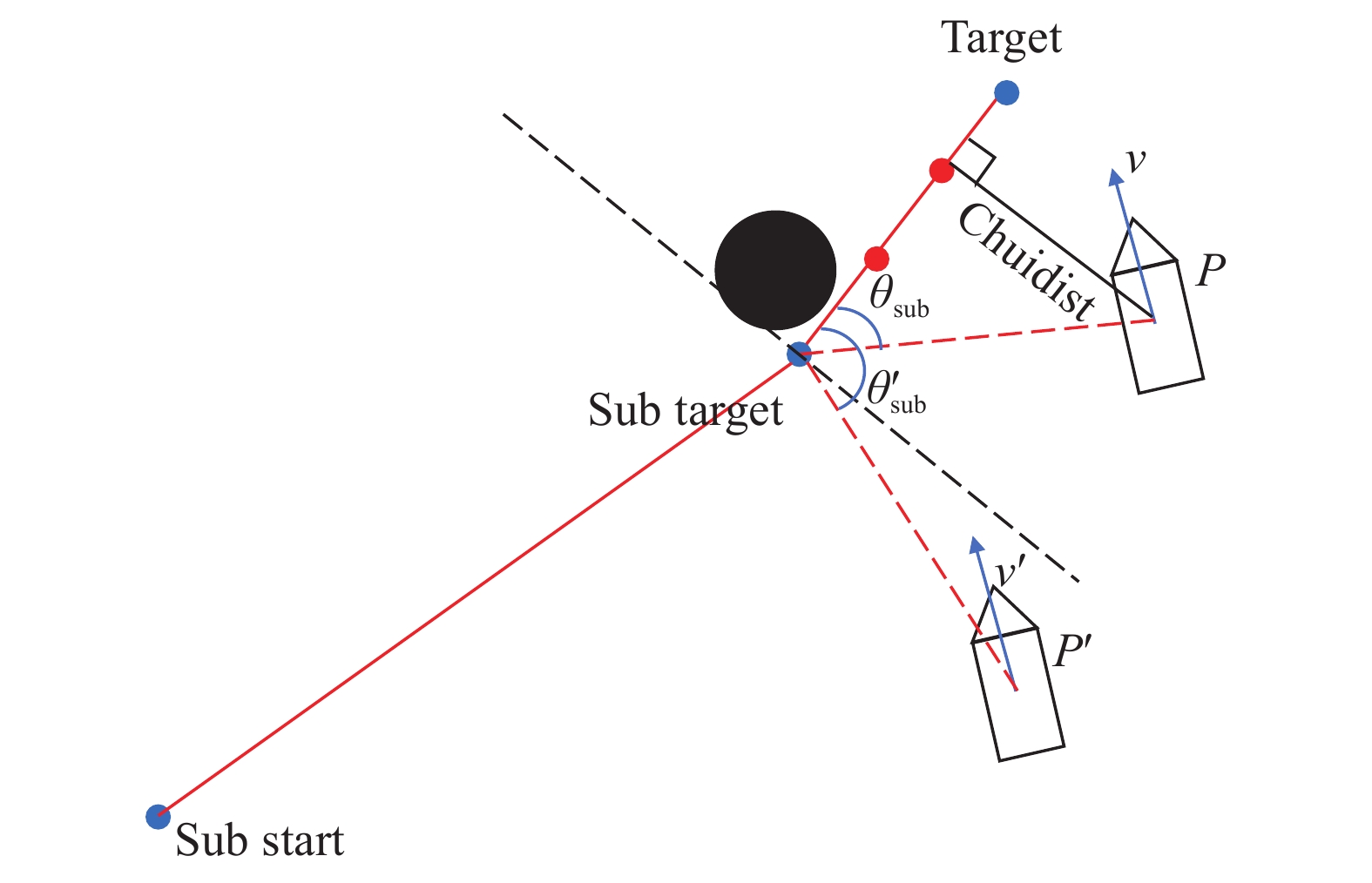
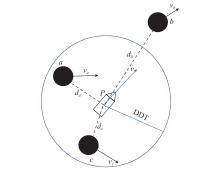
Fig 9
Navigation with multiple dynamic obstacles"
Fig 10
Principle of DCPA and TCPA"

Fig 11
USV navigating between the two dynamic obstacles"
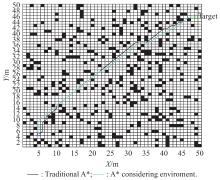
Fig 12
Comparison of planned paths"
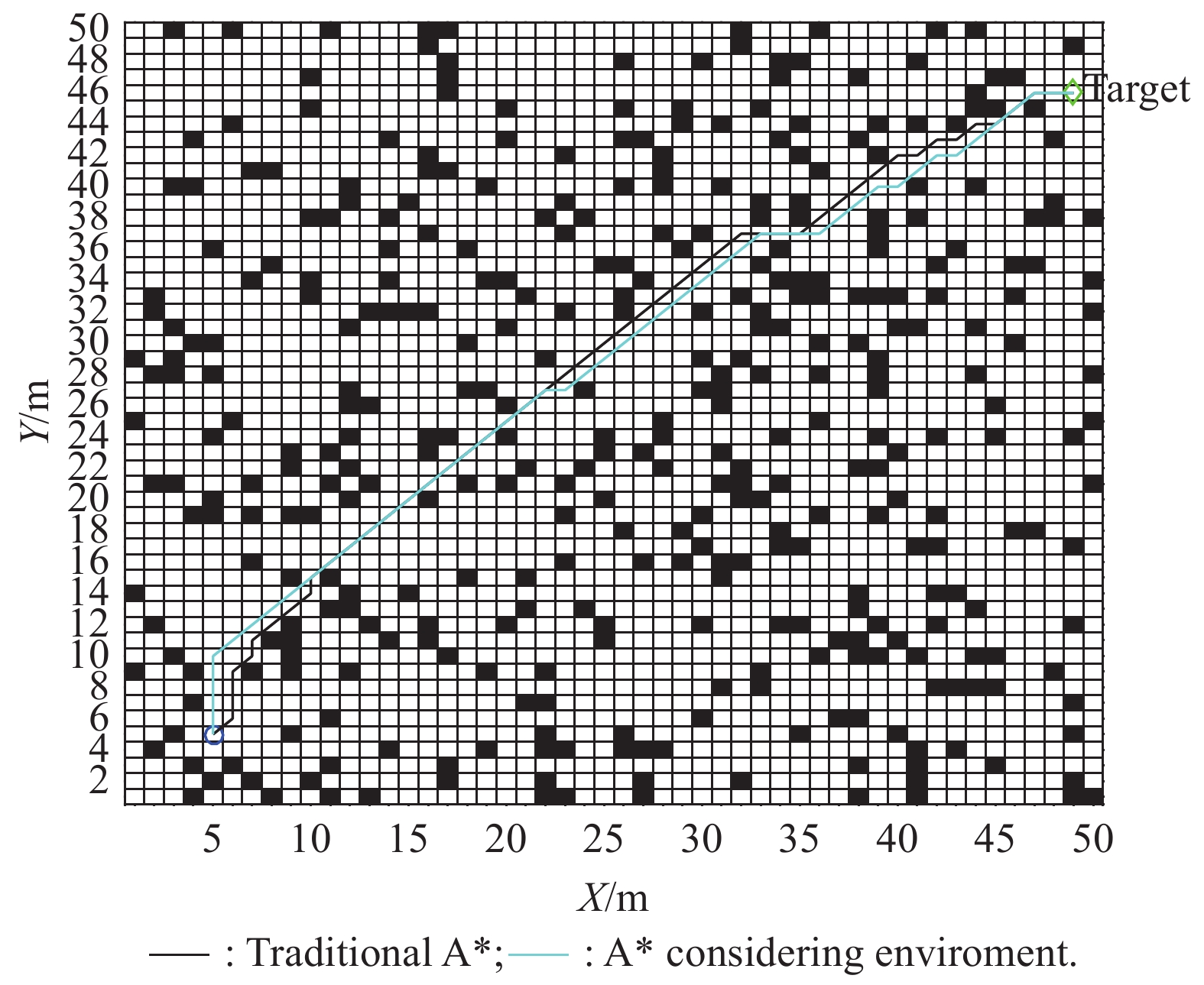
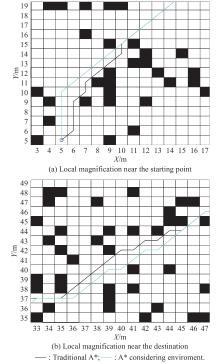
Fig 13
Local comparisons of planned paths"
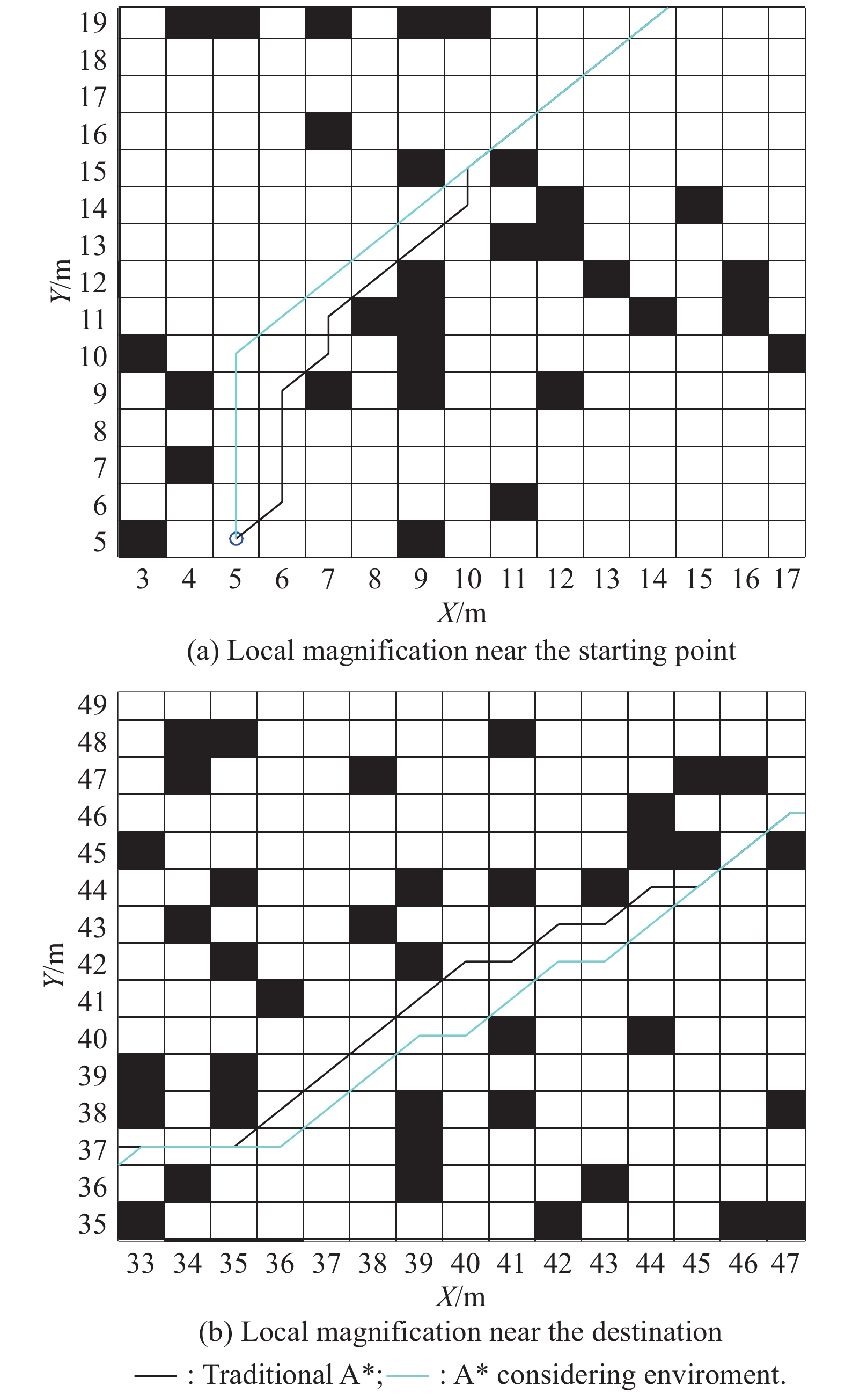
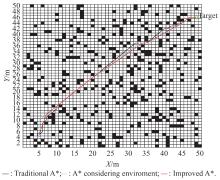
Fig 14
Comparison of three paths"
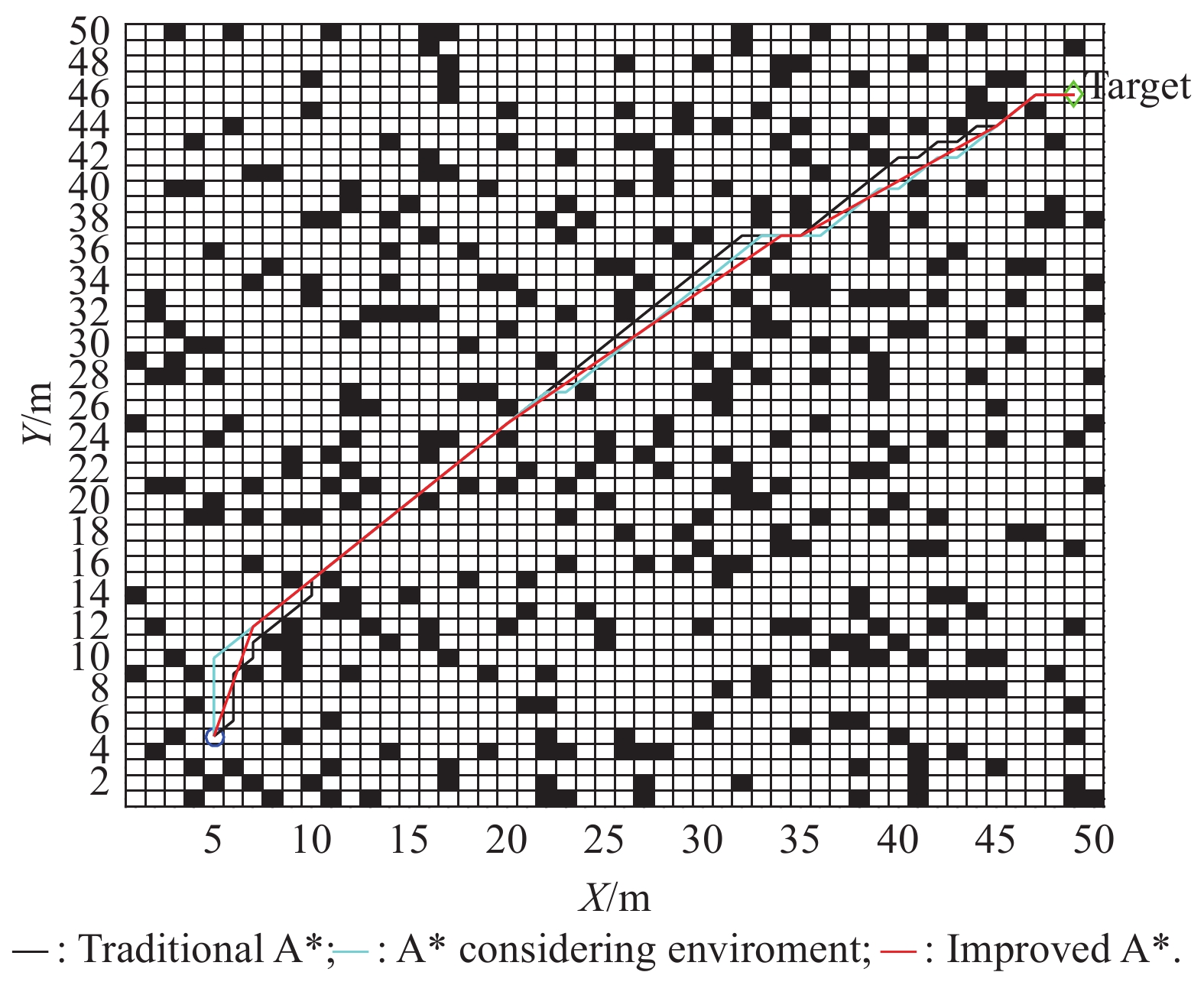
Table 1
Relevant parameters of three paths"
| Parameter | Traditional A* | A* considering obstacles | Optimization algorithm |
| Number of inflection nodes | 15 | 10 | 5 |
| Turning angle/(°) | 675.00 | 450.00 | 164.06 |
| Path length/m | 63.91 | 63.91 | 61.94 |
Table 2
Simulation experiment parameters"
| Parameter | Value |
| 0.2/0.5/0.7 | |
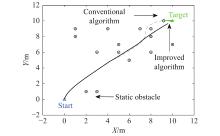
Fig 15
Comparison diagram of simulation path when the radius of obstacle expansion circle is r = 0.2 m"
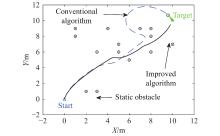
Fig 16
Comparison diagram of simulation path when the radius of obstacle expansion circle is r = 0.5 m"
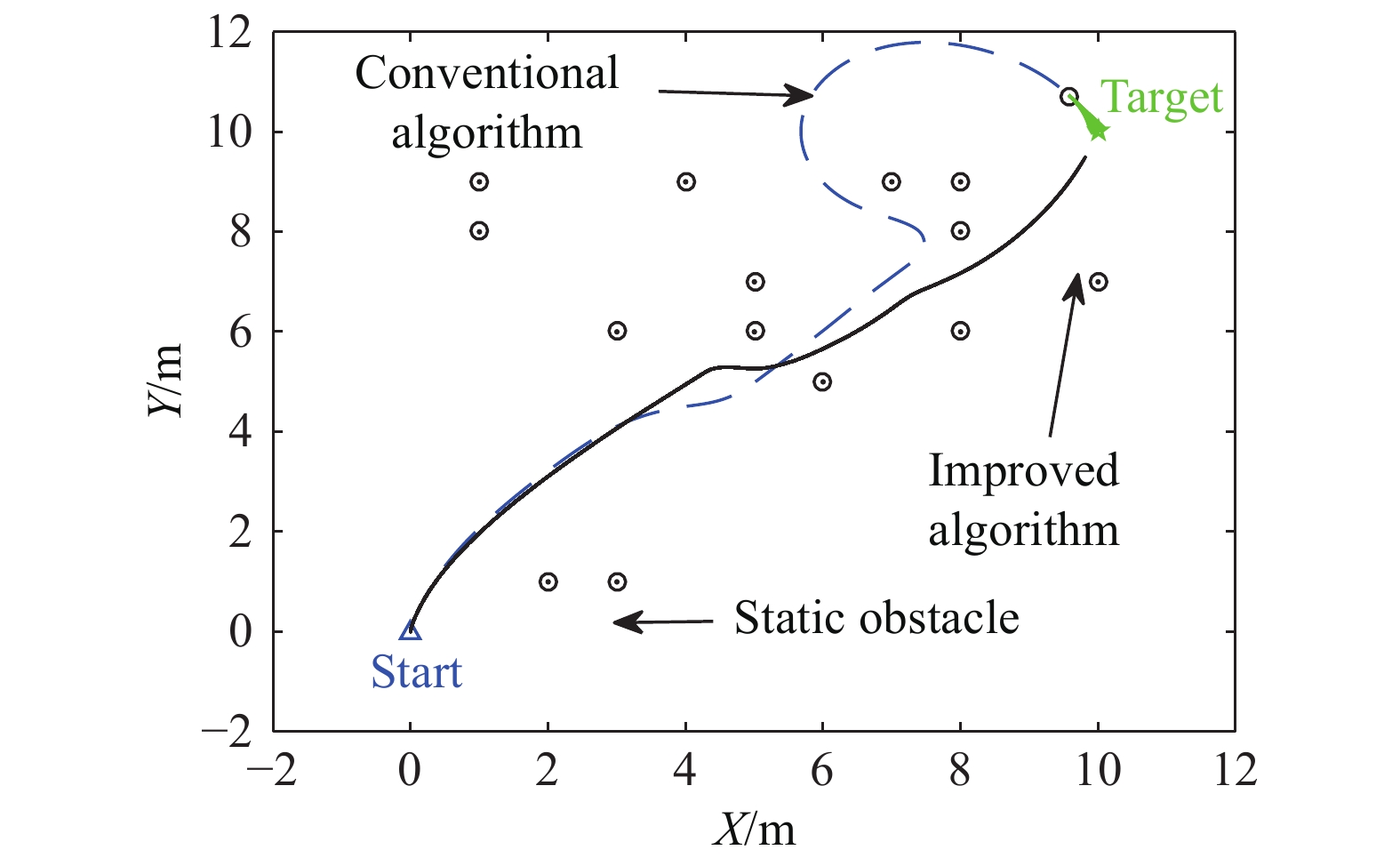
Fig 17
Comparison diagram of simulation path when the radius of obstacle expansion circle is r = 0.7 m"
Table 3
Table of obstacle avoidance simulation results of static obstacles with the same obstacle and different expansion circle radius"
| Radius of obstacle expansion circle/m | Time of navigation/s | Path length/m | Average velocity/(m/s) | ||||||||
| Traditional algorithm | Improved algorithm | Time reduction rate/% | Traditional algorithm | Improved algorithm | Time reduction rate/% | Traditional algorithm | Improved algorithm | Time reduction rate/% | |||
| 0.2 | 48.72 | 22.83 | 53.14 | 14.91 | 14.27 | 4.29 | 0.31 | 0.63 | 103.22 | ||
| 0.5 | 83.85 | 33.27 | 60.32 | 20.32 | 14.71 | 27.61 | 0.24 | 0.44 | 83.33 | ||
| 0.7 | 33.36 | 19.78 | 40.70 | 19.94 | 17.76 | 10.93 | 0.60 | 0.90 | 50.00 | ||

Fig 18
Dynamic obstacle avoidance of improved DWA when μ=0"
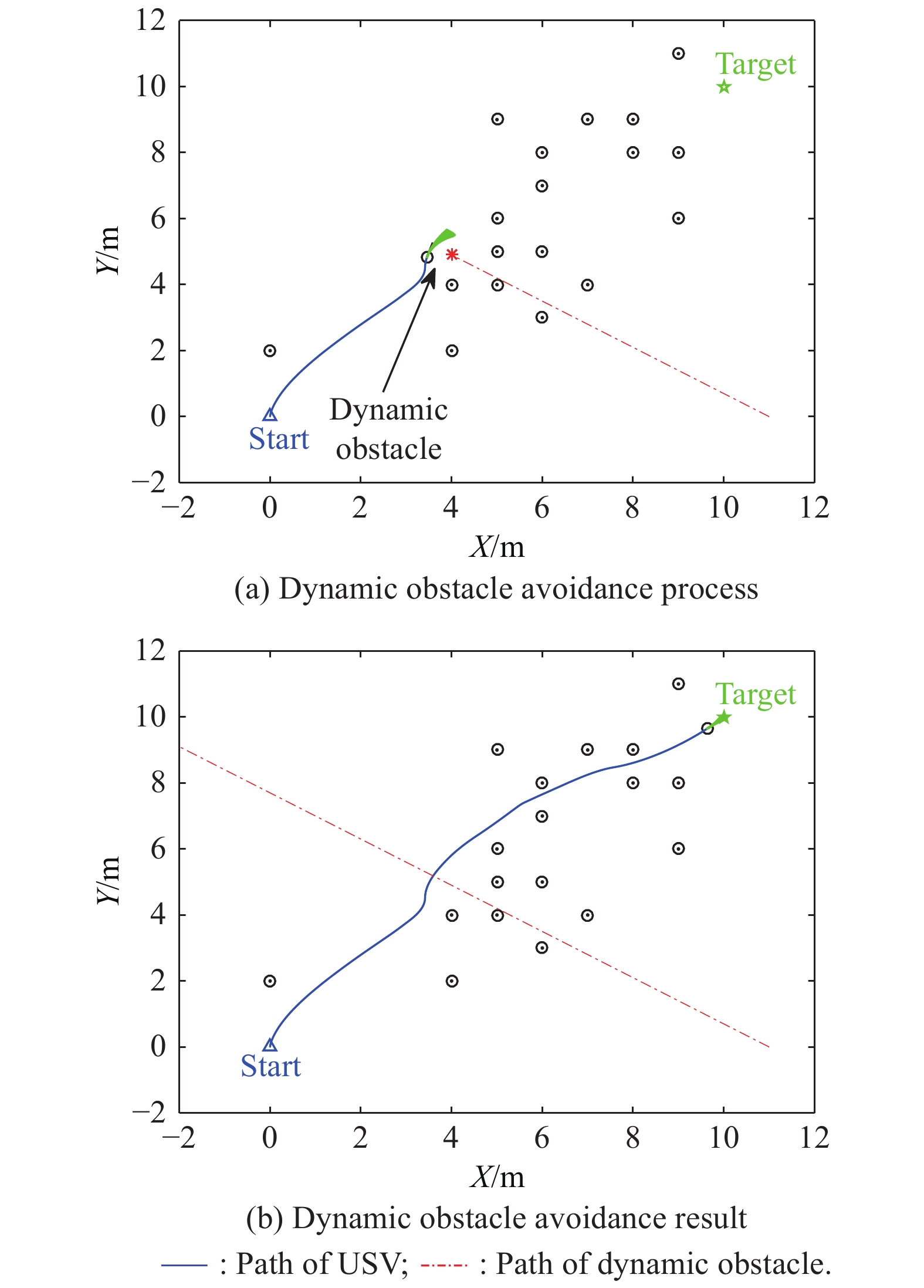

Fig 19
Dynamic obstacle avoidance of improved DWA when μ=0.05"
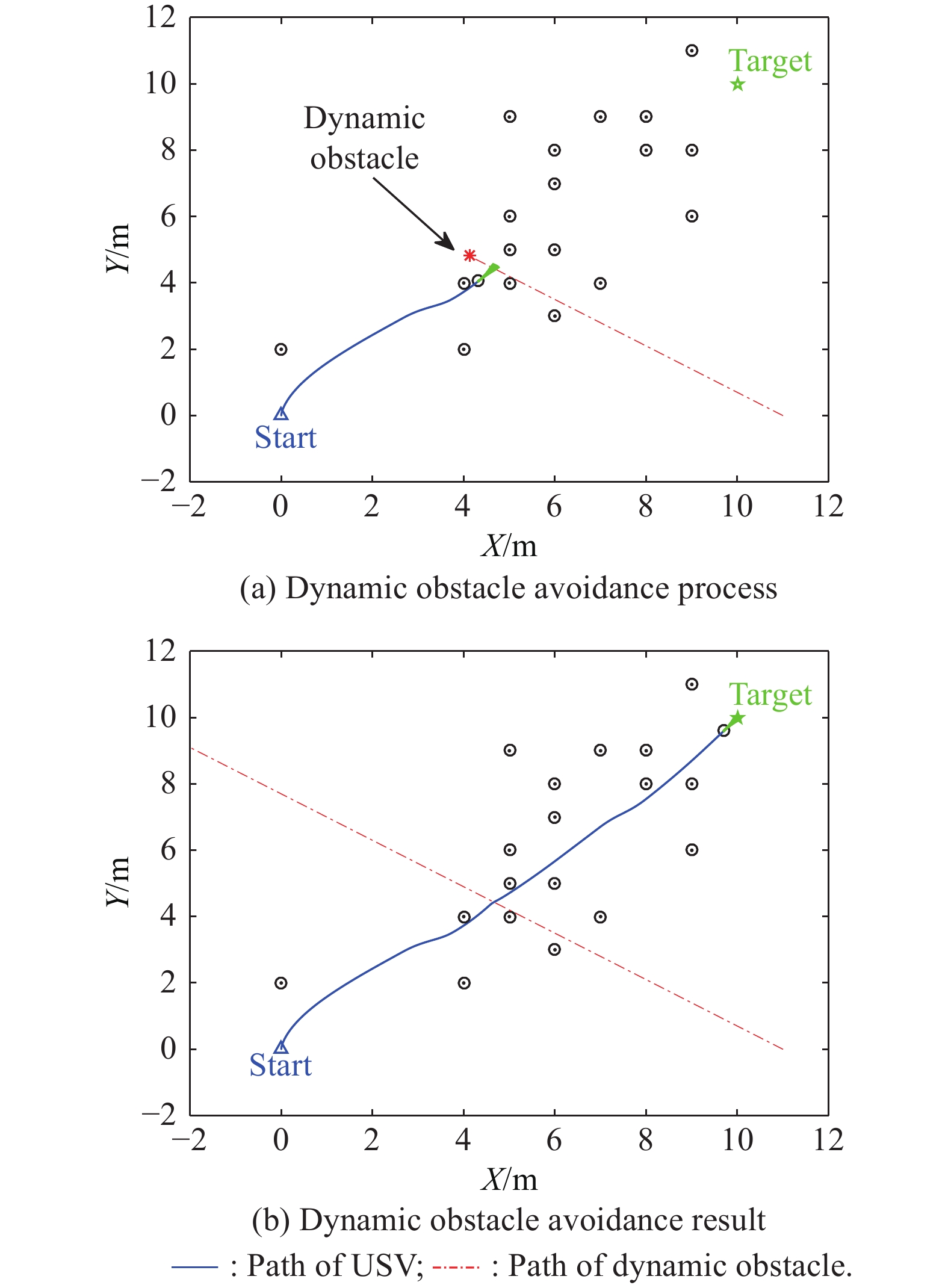

Fig 20
Dynamic obstacle avoidance of improved DWA when μ=0.1"
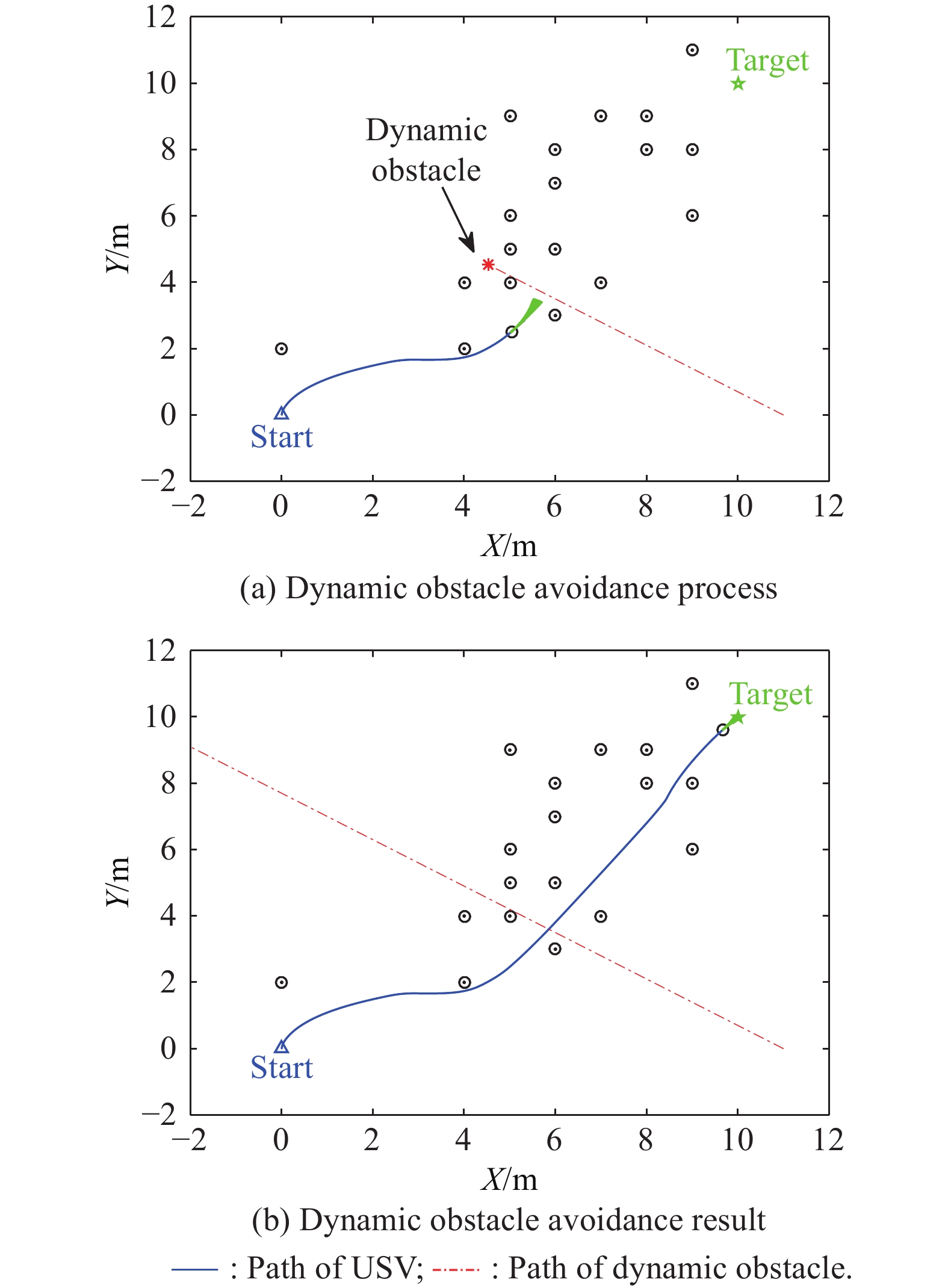

Fig 21
Dynamic obstacle avoidance of improved DWA when μ=0.3"
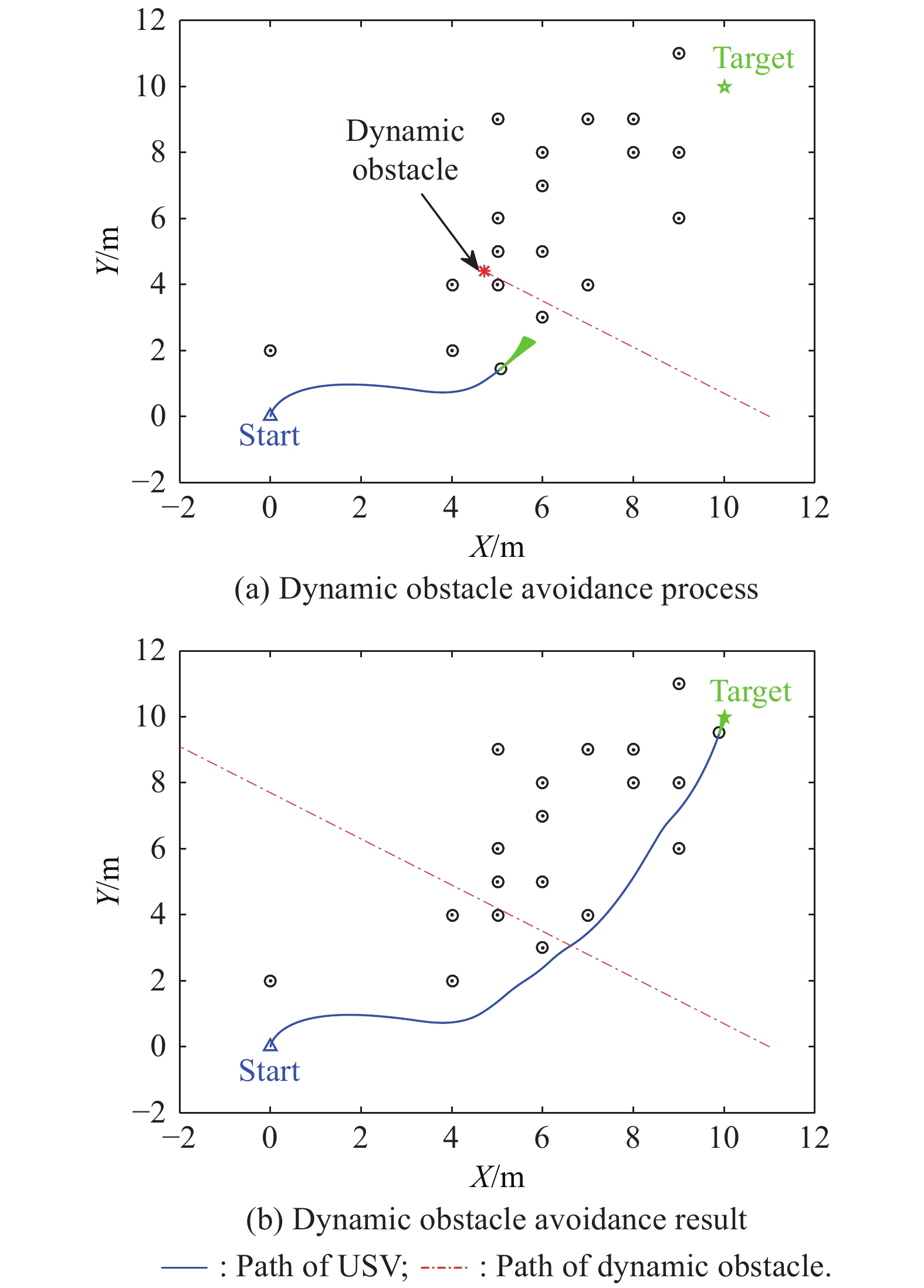
Table 4
Comparison of dynamic obstacle avoidance simulation results of improved algorithm"
| Time of navigation/s | Path length/m | Average velocity/(m/s) | |
| 0 | 72.40 | 14.63 | 0.20 |
| 0.05 | 57.34 | 14.32 | 0.25 |
| 0.1 | 56.91 | 14.95 | 0.26 |
| 0.3 | 54.88 | 15.80 | 0.29 |
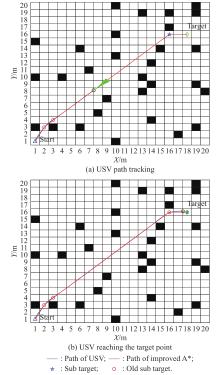
Fig 22
Results of fusion algorithm without considering dynamic obstacles"
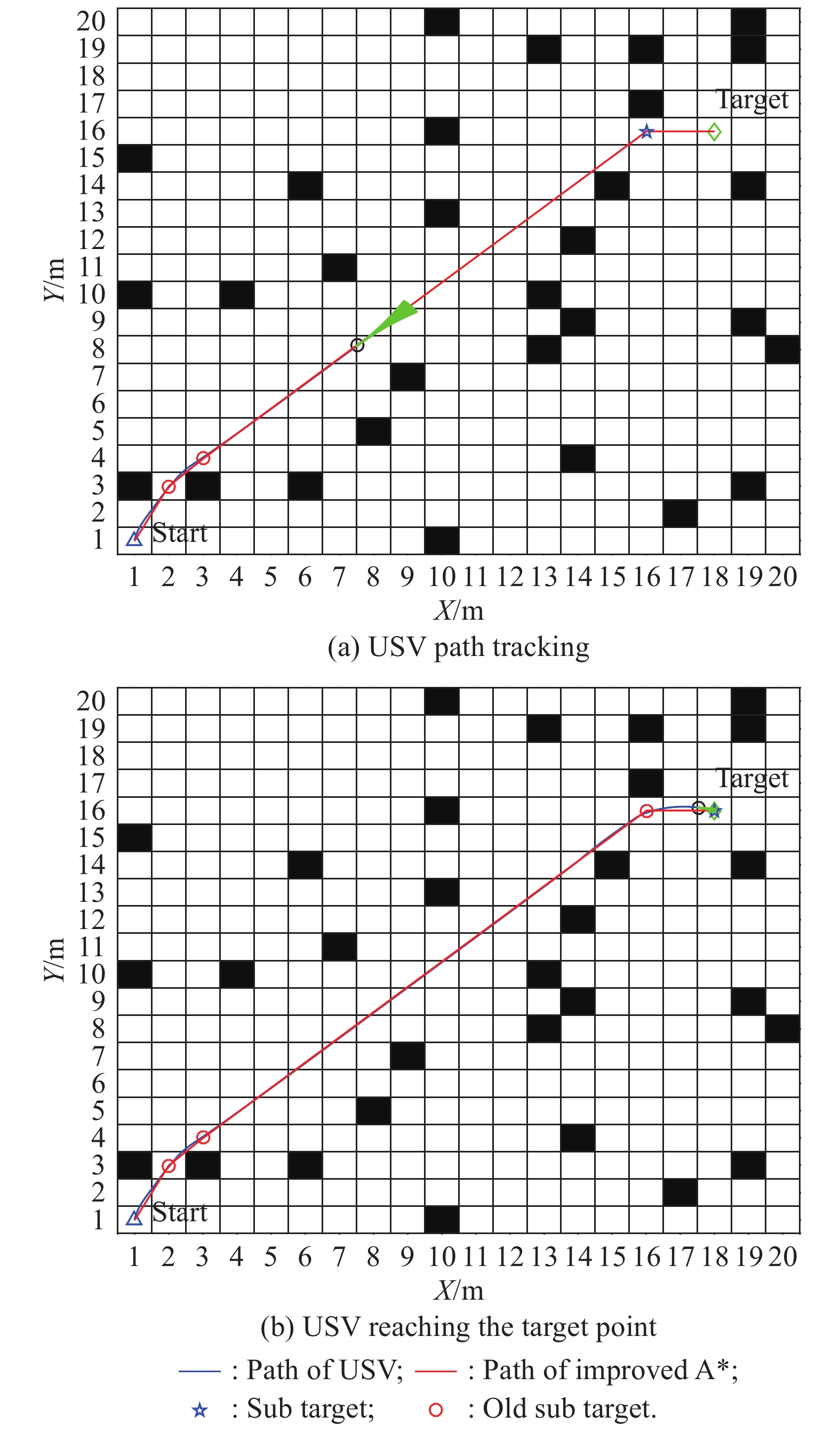
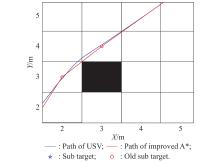
Fig 23
Local path 1"
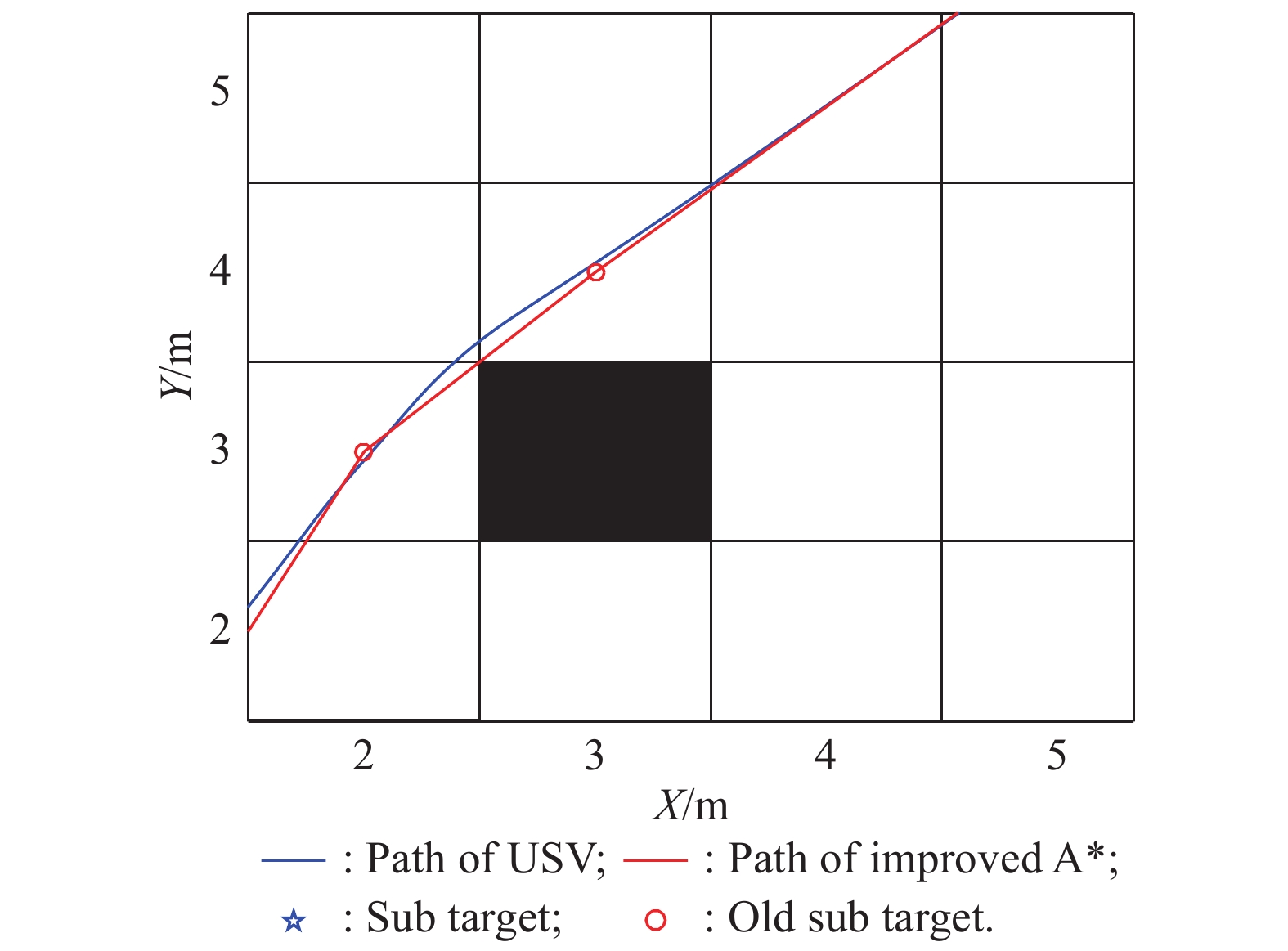
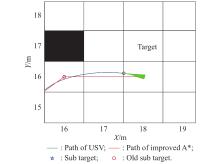
Fig 24
Local path 2"
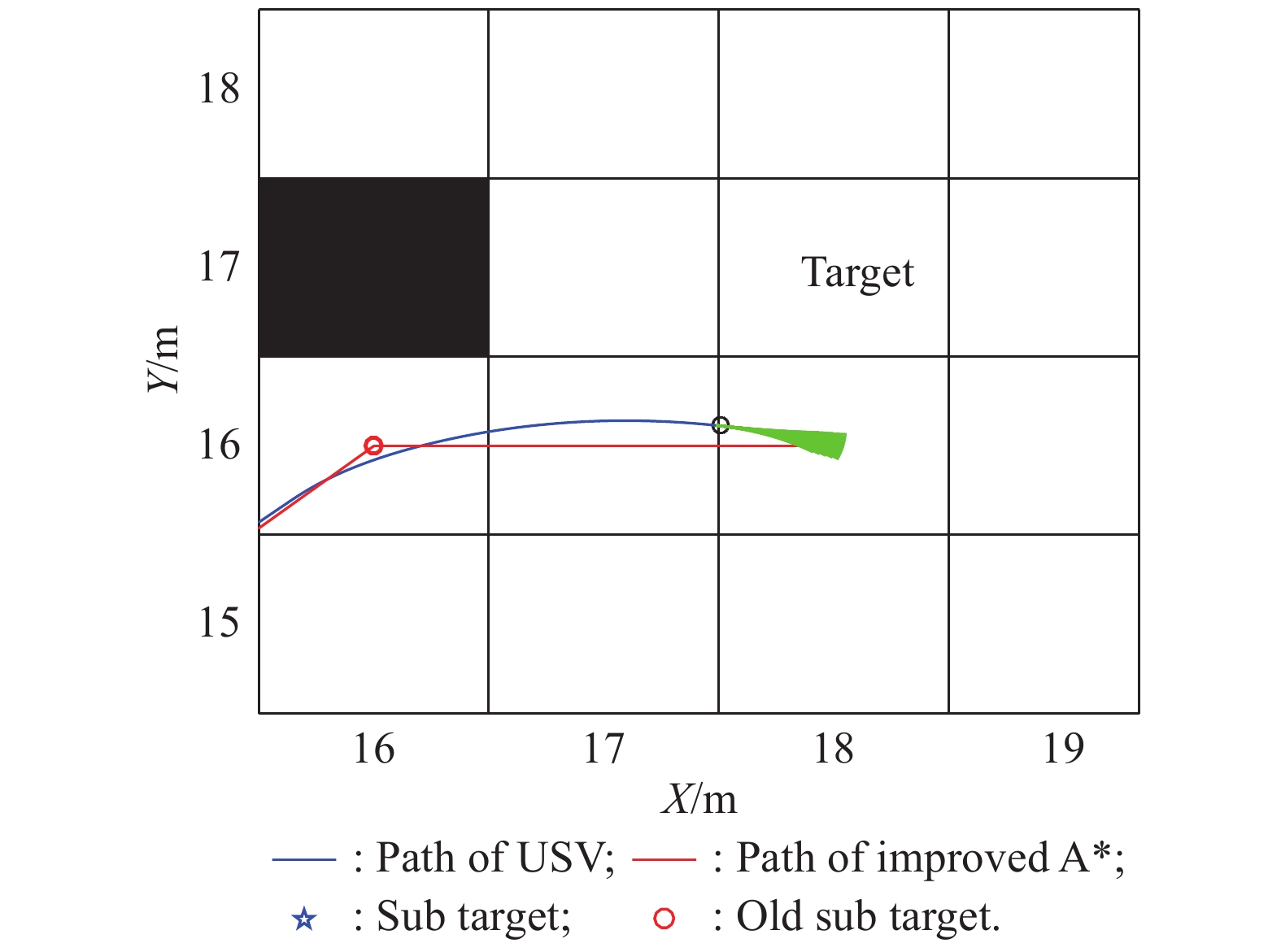
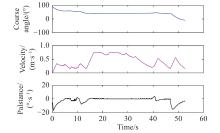
Fig 25
Relevant parameters of USV navigation"
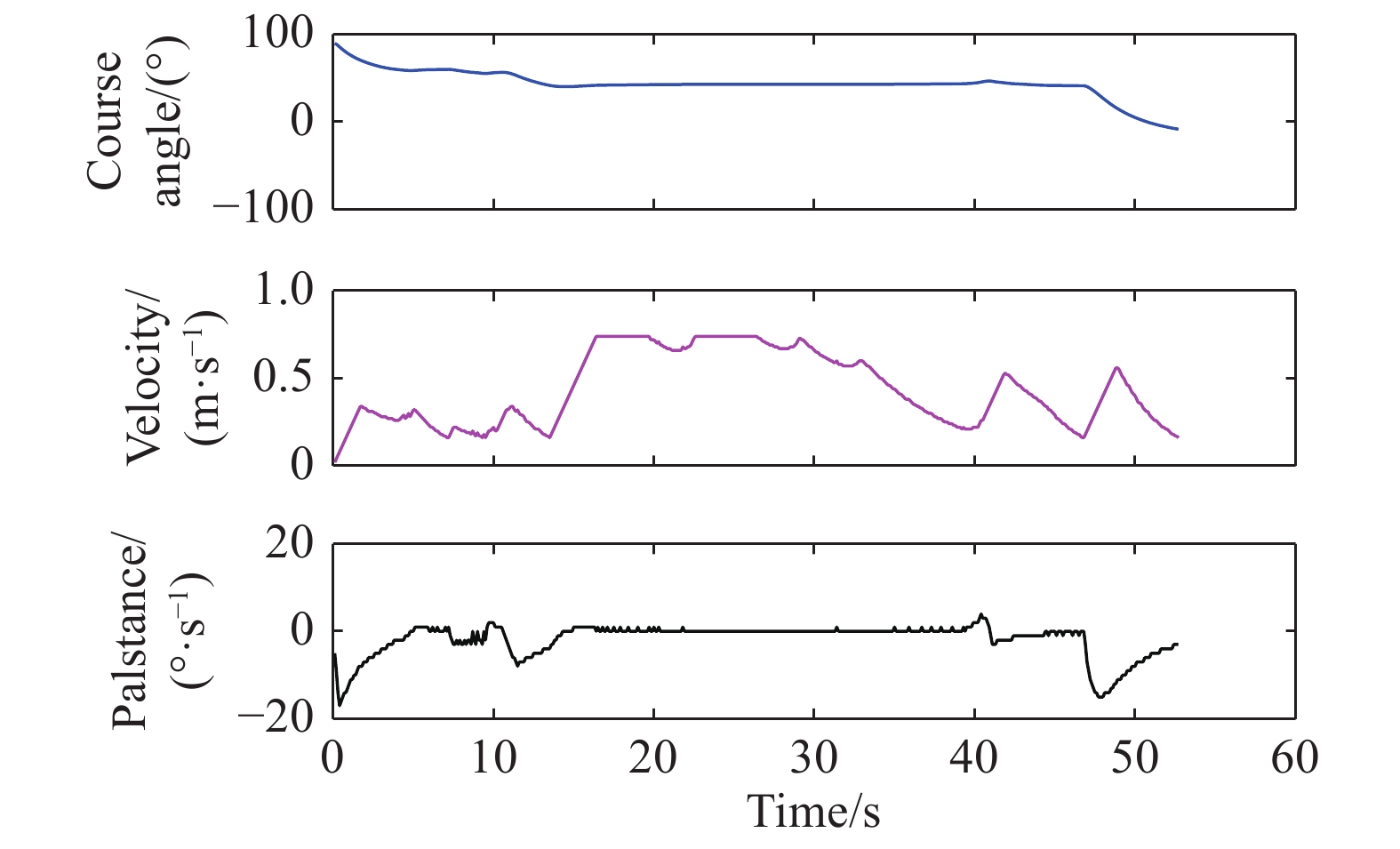
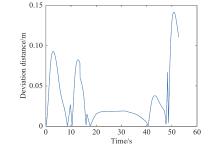
Fig 26
Vertical distance between the USV and planned path"
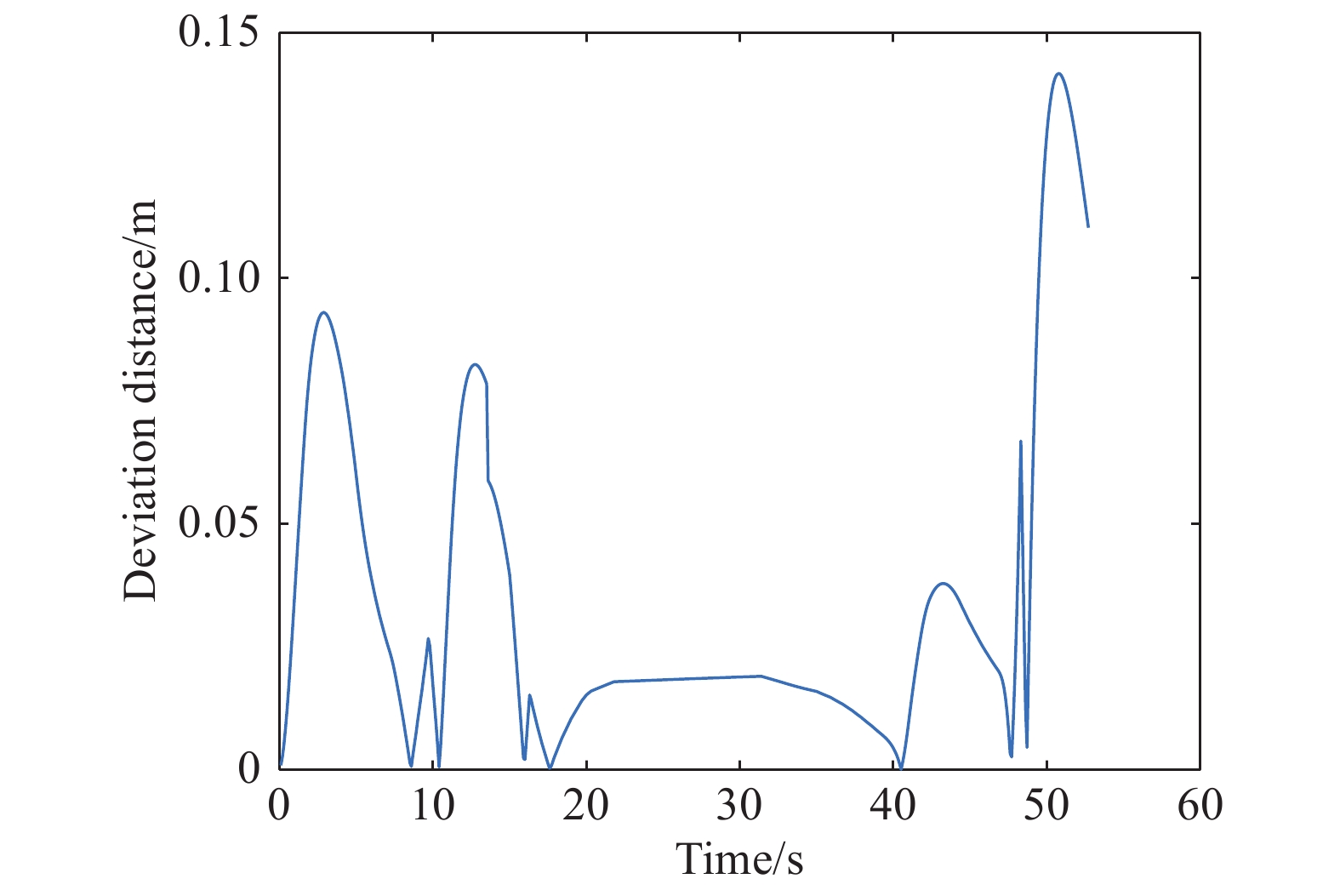

Fig 27
Dynamic obstacle avoidance of USV"

Fig 28
Vertical distance between USV and planned path"
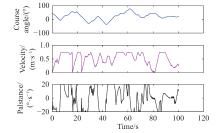
Fig 29
Motion parameters of USV"
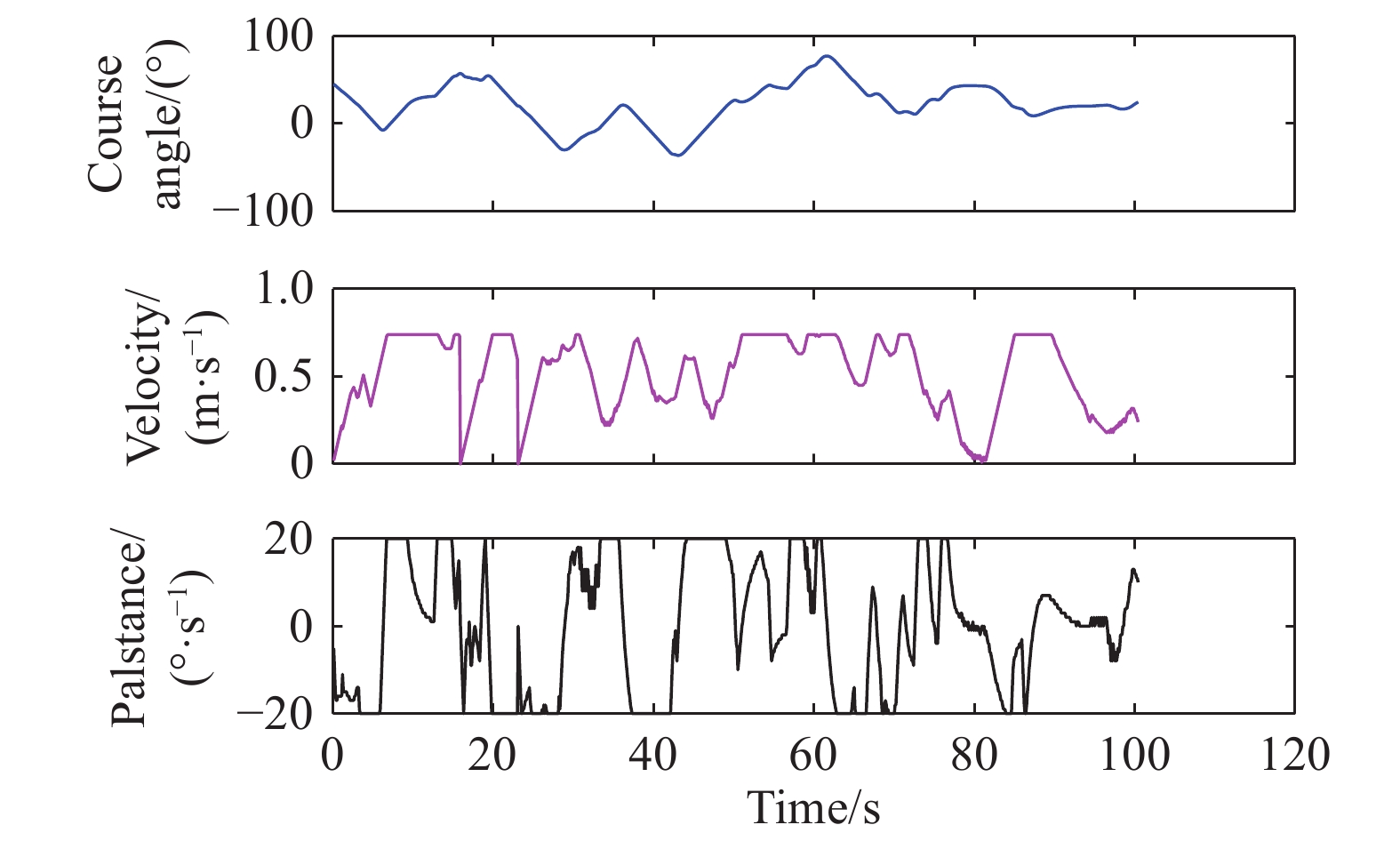

Fig 30
"

| 1 |
JIANG X L, XIA G H Dissipative leaderless formation via nonfragile memory sampled-data control for unmanned surface vehicles with switching topologies. IEEE/ASME Trans. on Mechatronics, 2024, 30 (1): 203- 214.
doi: 10.1109/tmech.2024.3391748 |
| 2 |
SHI J, YE M J Distributed optimal formation control for unmanned surface vessels by a regularized game-based approach. IEEE/CAA Journal of Automatica Sinica, 2024, 11 (1): 276- 278.
doi: 10.1109/JAS.2023.123930 |
| 3 |
XIA J W, ZHU X F, ZHONG L, et al LSTM-DPPO based deep reinforcement learning controller for path following optimization of unmanned surface vehicle. Journal of Systems Engineering and Electronics, 2023, 34 (5): 1343- 1358.
doi: 10.23919/JSEE.2023.000113 |
| 4 |
LIU Z X, ZHANG Y M, YU X, et al Unmanned surface vehicles: an overview of developments and challenges. Annual Reviews in Control, 2016, 41, 71- 93.
doi: 10.1016/j.arcontrol.2016.04.018 |
| 5 |
LOU M M, YANG X F, HU J B, et al Design and field test of collision avoidance method with prediction for USVs: a deep deterministic policy gradient approach. IEEE Internet of Things Journal, 2024, 12 (3): 3363- 3372.
doi: 10.1109/jiot.2024.3479322 |
| 6 | PATIL G, KASHID S, RANE A, et al. Analyzing and implementing pathfinding algorithms for flight route planning in Java. Proc. of the IEEE International Conference on Inventive Computation Technologies, 2025: 28−33. |
| 7 | BABU T, NAYAK D, MISHRA S. Enhancing greedy best-first search with dynamic heuristic for puzzle solving. Proc. of the IEEE International Conference on Emerging Technologies in Computing and Communication, 2025. DOI: 10.1109/ETCC65847.2025.11108541. |
| 8 |
LIN Z, WU K, SHEN R L, et al An efficient and accurate A-star algorithm for autonomous vehicle path planning. IEEE Trans. on Vehicular Technology, 2023, 73 (6): 9003- 9008.
doi: 10.1109/tvt.2023.3348140 |
| 9 |
ZHENG D L, RIDDERHOF J, ZHANG Z Y, et al CS-BRM: a probabilistic roadmap for consistent belief space planning with reachability guarantees. IEEE Trans. on Robotics, 2024, 40, 1630- 1649.
doi: 10.1109/TRO.2024.3355375 |
| 10 |
KHUAT T H, BUI D N, NGUYEN H T, et al Multi-goal rapidly exploring random tree with safety and dynamic constraints for UAV cooperative path planning. IEEE Trans. on Vehicular Technology, 2025, 74 (9): 13446- 13457.
doi: 10.1109/TVT.2025.3560658 |
| 11 |
HOU Y, QIN X M, HAN H G, et al Multiobjective ant colony optimization algorithm based on dynamic constraint evaluation strategy for highly constrained optimization. IEEE Trans. on Cybernetics, 2025, 55 (10): 4570- 4582.
doi: 10.1109/TCYB.2025.3591275 |
| 12 |
FENG T P, LI J M, JIANG H, et al The optimal global path planning of mobile robot based on improved hybrid adaptive genetic algorithm in different tasks and complex road environments. IEEE Access, 2024, 12, 18400- 18415.
doi: 10.1109/ACCESS.2024.3357990 |
| 13 |
GAN X L, HUO Z H, LI W DP-A*: for path planning of UGV and contactless delivery. IEEE Trans. on Intelligent Transportation Systems, 2023, 25 (1): 907- 919.
doi: 10.1109/tits.2023.3258186 |
| 14 |
JONNALAGADDA A, SAI Y, BHARAT M V, et al Efficient path planning in multi-agent environment of AAVS with payloads. IEEE Access, 2025, 13, 57932- 57942.
doi: 10.1109/ACCESS.2025.3554546 |
| 15 |
DANIEL K, NASH A, KOENIG S, et al Theta*: any-angle path planning on grids. Journal of Artificial Intelligence Research, 2010, 39, 533- 579.
doi: 10.1613/jair.2994 |
| 16 |
MANYAM S G, CASBEER D W, TAYLOR C Hybrid Theta*: motion planning for dubins vehicles with integral constraints. IEEE Robotics and Automation Letters, 2024, 10 (2): 1497- 1504.
doi: 10.1109/lra.2024.3522786 |
| 17 |
LIU H X, ZHANG Y H ASL-DWA: an improved A-star algorithm for indoor cleaning robots. IEEE Access, 2022, 10, 99498- 99515.
doi: 10.1109/ACCESS.2022.3206356 |
| 18 |
WANG M H, XU J, ZHANG J, et al An autonomous navigation method for orchard rows based on a combination of an improved A-star algorithm and SVR. Precision Agriculture, 2024, 25 (3): 1429- 1453.
doi: 10.1007/s11119-024-10118-z |
| 19 |
SANG H Q, YOU Y S, SUN X J, et al The hybrid path planning algorithm based on improved A* and artificial potential field for unmanned surface vehicle formations. Ocean Engineering, 2021, 223, 108709.
doi: 10.1016/j.oceaneng.2021.108709 |
| 20 |
ZHANG H X, TAO Y D, ZHU W L Global path planning of unmanned surface vehicle based on improved A-star algorithm. Sensors, 2023, 23 (14): 6647.
doi: 10.3390/s23146647 |
| 21 |
WANG Y L, YU X M, LIANG X, et al A COLREGs-based obstacle avoidance approach for unmanned surface vehicles. Ocean Engineering, 2018, 169 (1): 110- 124.
doi: 10.1016/j.oceaneng.2018.09.012 |
| 22 |
GIBSON J, SCHULER T, MCGUIRE L, et al Swarm and multi-agent time-based A* path planning for lighter-than-air systems. Unmanned Systems, 2020, 8 (3): 253- 260.
doi: 10.1142/S2301385020500181 |
| 23 |
HE Z B, LIU C G, CHU X M, et al Dynamic anti-collision A-star algorithm for multi-ship encounter situations. Applied Ocean Research, 2022, 118, 102995.
doi: 10.1016/j.apor.2021.102995 |
| 24 |
SHAN S F, SHAO J J, ZHANG H J, et al Research and validation of self-driving path planning algorithm based on optimized A*-artificial potential field method. IEEE Sensors Journal, 2024, 24 (15): 24708- 24722.
doi: 10.1109/JSEN.2024.3410271 |
| 25 |
SONG Y C, WANG R H, BI Q C, et al STVO: spatial-temporal constrained velocity obstacle for safe navigation among pedestrians. IEEE Trans. on Vehicular Technology, 2025, 74 (9): 13580- 13591.
doi: 10.1109/TVT.2025.3565734 |
| 26 |
CHEN Z, ZHANG Y M, ZHANG Y G, et al A hybrid path planning algorithm for unmanned surface vehicles in complex environment with dynamic obstacles. IEEE Access, 2019, 7, 126439- 126449.
doi: 10.1109/ACCESS.2019.2936689 |
| 27 |
ZHANG J, CUI Y N, LI G F, et al Dynamic path planning algorithm for unmanned surface vehicle under island-reef environment. IEEE Trans. on Aerospace and Electronic Systems, 2023, 59 (5): 7252- 7268.
doi: 10.1109/taes.2023.3286823 |
| 28 |
CHEN H, LIN Z L, CHEN Z M, et al Adaptive DWA algorithm with decision tree classifier for dynamic planning in USV navigation. Ocean Engineering, 2025, 321, 120328.
doi: 10.1016/j.oceaneng.2025.120328 |
| 29 |
ZHU W L, CHEN Z F Research on path planning for mobile charging robots based on improved A* and DWA algorithms. Electronics, 2025, 14 (12): 2318.
doi: 10.3390/electronics14122318 |
| 30 |
GUAN W, WANG K Autonomous collision avoidance of unmanned surface vehicles based on improved A-star and dynamic window approach algorithms. IEEE Intelligent Transportation Systems Magazine, 2023, 15 (3): 36- 50.
doi: 10.1109/MITS.2022.3229109 |
| 31 |
SONG R, LIU Y C, BUCKNALL R Smoothed A* algorithm for practical unmanned surface vehicle path planning. Applied Ocean Research, 2019, 83, 9- 20.
doi: 10.1016/j.apor.2018.12.001 |
| 32 |
DU Z, WEN Y Q, XIAO C S, et al Trajectory-cell based method for the unmanned surface vehicle motion planning. Applied Ocean Research, 2019, 86, 207- 221.
doi: 10.1016/j.apor.2019.02.005 |
| 33 |
BITAR G, MARTINSEN A B, LEKKAS A M, et al Two-stage optimized trajectory planning for ASVs under polygonal obstacle constraints: theory and experiments. IEEE Access, 2020, 8, 199953- 199969.
doi: 10.1109/ACCESS.2020.3035256 |
| 34 |
WANG Y L, YU X M, LIANG X Design and implementation of global path planning system for unmanned surface vehicle among multiple task points. International Journal of Vehicle Autonomous Systems, 2018, 14 (1): 82- 105.
doi: 10.1504/ijvas.2018.10014293 |
| 35 |
SU Y X, XIN J Y, SUN C Y Dynamic path planning for mobile robots based on improved RRT* and DWA algorithms. IEEE Trans. on Industrial Electronics, 2025, 72 (10): 10595- 10604.
doi: 10.1109/TIE.2025.3546349 |
| 36 |
JIAN Z Q, ZHANG S Y, SUN L F, et al Long-term dynamic window approach for kinodynamic local planning in static and crowd environments. IEEE Robotics and Automation Letters, 2023, 8 (6): 3294- 3301.
doi: 10.1109/LRA.2023.3266664 |
| 37 |
YASUDA S, KUMAGAI T, YOSHIDA H Safe and efficient dynamic window approach for differential mobile robots with stochastic dynamics using deterministic sampling. IEEE Robotics and Automation Letters, 2023, 8 (5): 2614- 2621.
doi: 10.1109/LRA.2023.3257681 |
| 38 |
HU Y W, CHEN X F, TANG P P, et al A path planning framework for robots based on improved parallel sampling RRT and offset guidance DWA. IEEE Sensors Journal, 2025, 25 (18): 35597- 35608.
doi: 10.1109/JSEN.2025.3596346 |
| 39 |
HUANG J H, ZENG J, CHI X M, et al Dynamic collision avoidance using velocity obstacle-based control barrier functions. IEEE Trans. on Control Systems Technology, 2025, 33 (5): 1601- 1615.
doi: 10.1109/TCST.2025.3546076 |
| 40 | DE BOOIJ A, THEUNISSEN E. Analyzing the impact of sensor noise in the TCPA-DCPA domain. Proc. of the AIAA DATC/IEEE 43rd Digital Avionics Systems Conference, 2024. DOI: 10.1109/DASC62030.2024.10749449. |
| [1] | Xiaoduo LI, He LUO, Guoqiang WANG, Youlong YIN. Improved simulated annealing algorithm for UAV path planning with uncertain flight time [J]. Journal of Systems Engineering and Electronics, 2026, 37(1): 272-286. |
| [2] | Yixin HU, Yun XU, Zhaohui DANG. Time-efficient cooperative attack strategy considering collision avoidance for missile swarm [J]. Journal of Systems Engineering and Electronics, 2025, 36(5): 1306-1316. |
| [3] | Zhenlin ZHOU, Teng LONG, Jingliang SUN, Junzhi LI. Hierarchical cooperative path planning method using three-dimensional velocity-obstacle strategy for multiple fixed-wing UAVs [J]. Journal of Systems Engineering and Electronics, 2025, 36(5): 1342-1352. |
| [4] | Hongen LI, Shilong LI, Qi WANG, Xiaoming HUANG. AUV 3D path planning based on improved PSO [J]. Journal of Systems Engineering and Electronics, 2025, 36(3): 854-866. |
| [5] | Gang LIU, Xinyuan GUO, Dong HUANG, Kezhong CHEN, Wu LI. Multi-platform collaborative MRC-PSO algorithm for anti-ship missile path planning [J]. Journal of Systems Engineering and Electronics, 2025, 36(2): 494-509. |
| [6] | Jiandong ZHANG, Yukun GUO, Lihui ZHENG, Qiming YANG, Guoqing SHI, Yong WU. Real-time UAV path planning based on LSTM network [J]. Journal of Systems Engineering and Electronics, 2024, 35(2): 374-385. |
| [7] | Jia ZHANG, Xin DU, Qichen DONG, Bin XIN. Distributed collaborative complete coverage path planning based on hybrid strategy [J]. Journal of Systems Engineering and Electronics, 2024, 35(2): 463-472. |
| [8] | Jiawei XIA, Xufang ZHU, Zhong LIU, Qingtao XIA. LSTM-DPPO based deep reinforcement learning controller for path following optimization of unmanned surface vehicle [J]. Journal of Systems Engineering and Electronics, 2023, 34(5): 1343-1358. |
| [9] | Yunxiu ZENG, Kai XU. Recognition and interfere deceptive behavior based on inverse reinforcement learning and game theory [J]. Journal of Systems Engineering and Electronics, 2023, 34(2): 270-288. |
| [10] | Jing LUO, Qianchao LIANG, Hao LI. UAV penetration mission path planning based on improved holonic particle swarm optimization [J]. Journal of Systems Engineering and Electronics, 2023, 34(1): 197-213. |
| [11] | Gang LIU, Zhibiao AN, Songyang LAO, Wu LI. Firepower distribution method of anti-ship missile based on coupled path planning [J]. Journal of Systems Engineering and Electronics, 2022, 33(4): 1010-1024. |
| [12] | Lanyong ZHANG, Ruixuan ZHANG. Research on UAV cloud control system based on ant colony algorithm [J]. Journal of Systems Engineering and Electronics, 2022, 33(4): 805-811. |
| [13] | Alireza MOHSENI, Vincent DUCHAINE, Tony WONG. Experimental study of path planning problem using EMCOA for a holonomic mobile robot [J]. Journal of Systems Engineering and Electronics, 2021, 32(6): 1450-1462. |
| [14] | Zhen XU, Enze ZHANG, Qingwei CHEN. Rotary unmanned aerial vehicles path planning in rough terrain based on multi-objective particle swarm optimization [J]. Journal of Systems Engineering and Electronics, 2020, 31(1): 130-141. |
| [15] | Qiming YANG, Jiandong ZHANG, Guoqing SHI. Modeling of UAV path planning based on IMM under POMDP framework [J]. Journal of Systems Engineering and Electronics, 2019, 30(3): 545-554. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||