
Journal of Systems Engineering and Electronics ›› 2025, Vol. 36 ›› Issue (4): 1077-1093.doi: 10.23919/JSEE.2025.000079
• CONTROL THEORY AND APPLICATION • Previous Articles
Xunhua DAI1( ), Jinhu TU2(), Quan QUAN3,*()
), Jinhu TU2(), Quan QUAN3,*()
Received:2024-08-13
Online:2025-08-18
Published:2025-09-04
Contact:
Quan QUAN
E-mail:dai.xh@csu.edu.cn;tjhcsu@csu.edu.cn;qq_buaa@buaa.edu.cn
About author:Supported by:Xunhua DAI, Jinhu TU, Quan QUAN. RflySim ToolChain: a rapid development and validation toolchain for intelligent unmanned swarm systems[J]. Journal of Systems Engineering and Electronics, 2025, 36(4): 1077-1093.

Fig 1
Platform architecture of RflySim ToolChain"

Fig 2
Typical development process of RflySim ToolChain"
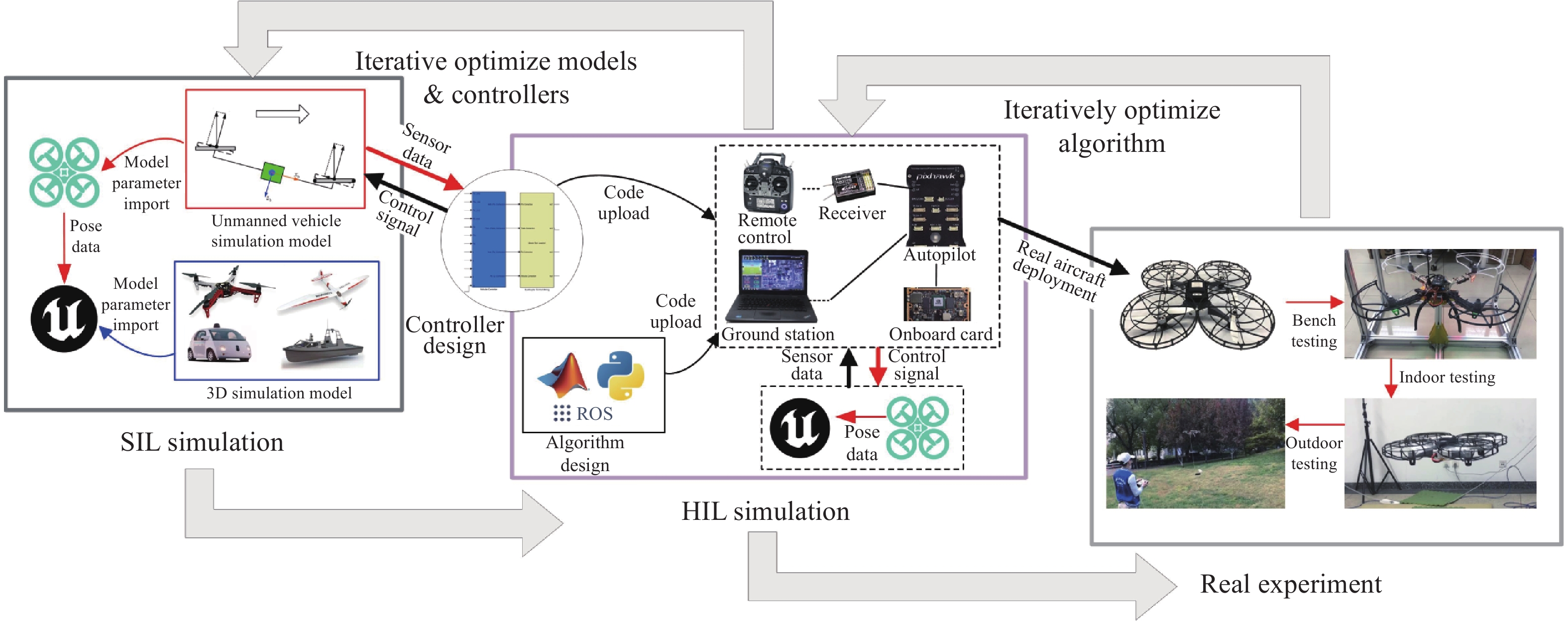
Table 1
Target users and learning curve objective of RflySim ToolChain"
| Additional support | Target user | Learning objective |
| Provide introductory tutorials, video courses, advanced functions and customized solutions. Establish online forums and user communities to encourage communication and mutual assistance among users, and provide technical support and communication. | Academic researchers | Powerful support for complex algorithm development and validation, with detailed case studies, tutorials, extensive documentation, and sample code to get started quickly |
| Industry engineer | Highlights methods for system integration, testing and deployment, and provides practical guidance, rich interfaces and technical support services to solve problems encountered in actual applications |

Fig 3
Unified modeling framework for unmanned vehicles"

Fig 4
Simulation framework of visual perception and obstacle avoidance"
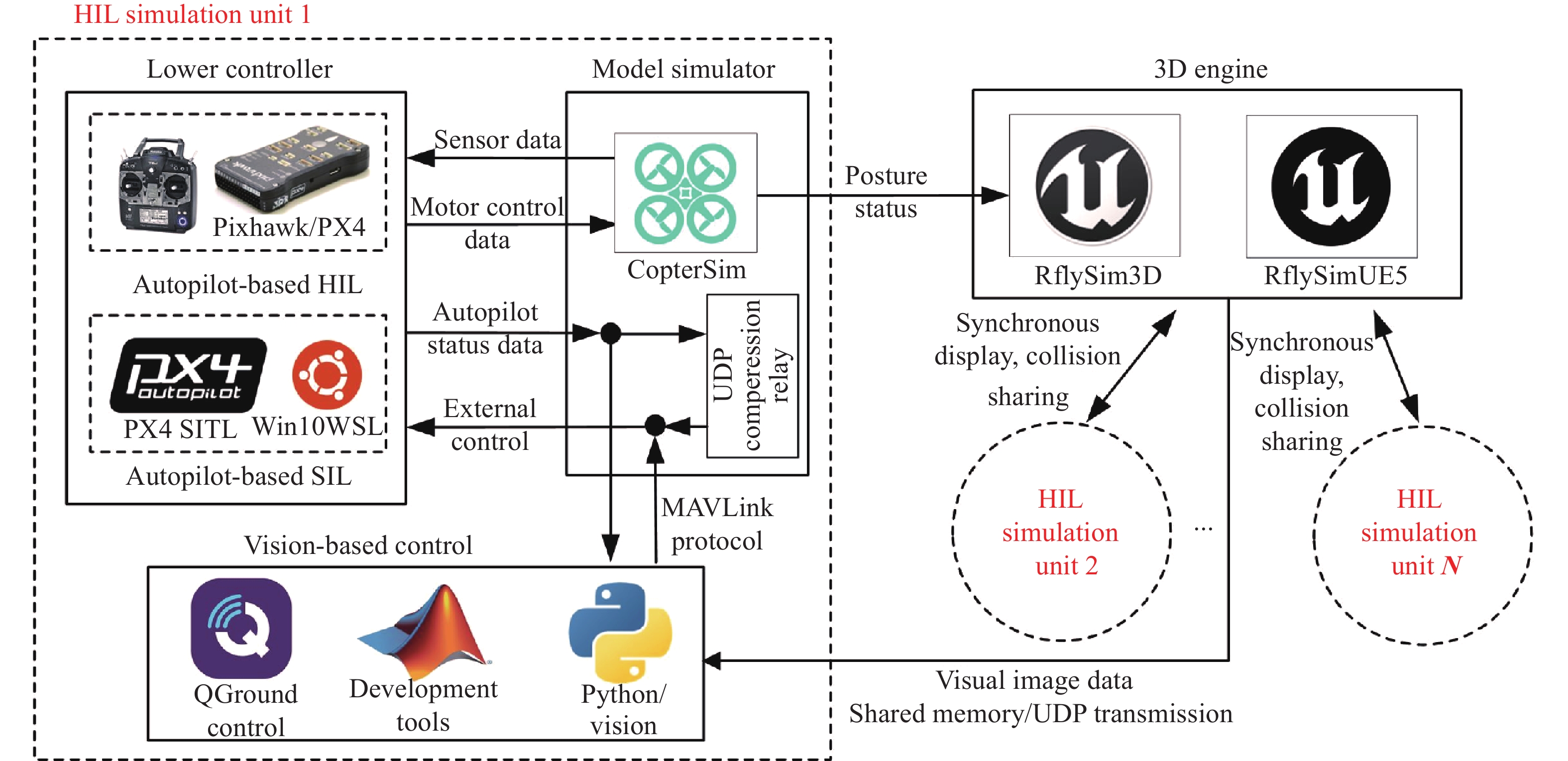
Fig 5
Implementation mechanism of swarm control and game confrontation"
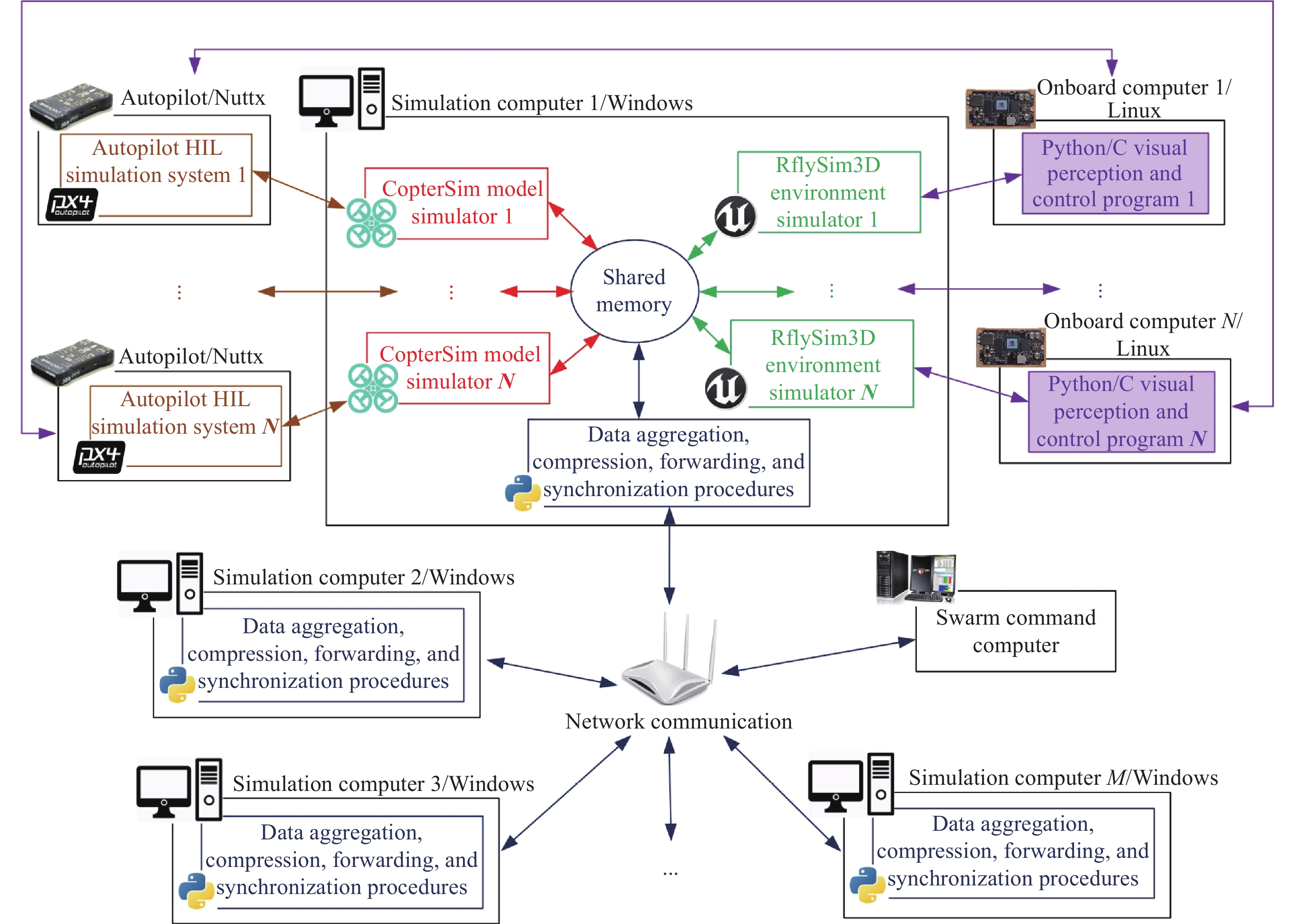
Table 2
Recommended computer configuration items"
| Item | Minimum recommended specification |
| Operating system | Windows 10×64 (version 1 809 or higher) |
| CPU | Intel the 8th generation Core i7 processor or higher, or equivalent AMD processor |
| Graphics card | NVIDIA GTX AMD graphics card |
| Memory | 16 GB RAM or higher, DDR3 1 600 MHz or higher |
| Storage | At least 40 GB free space on the installation drive (SSD recommended) |
| Monitor | Resolution of at least 1 080 P (1 920× higher (dual monitors recommended) |
| Interface | At least one USB Type A port (expandable via adapters) |

Fig 6
3D scene modeling cases of RflySim ToolChain"
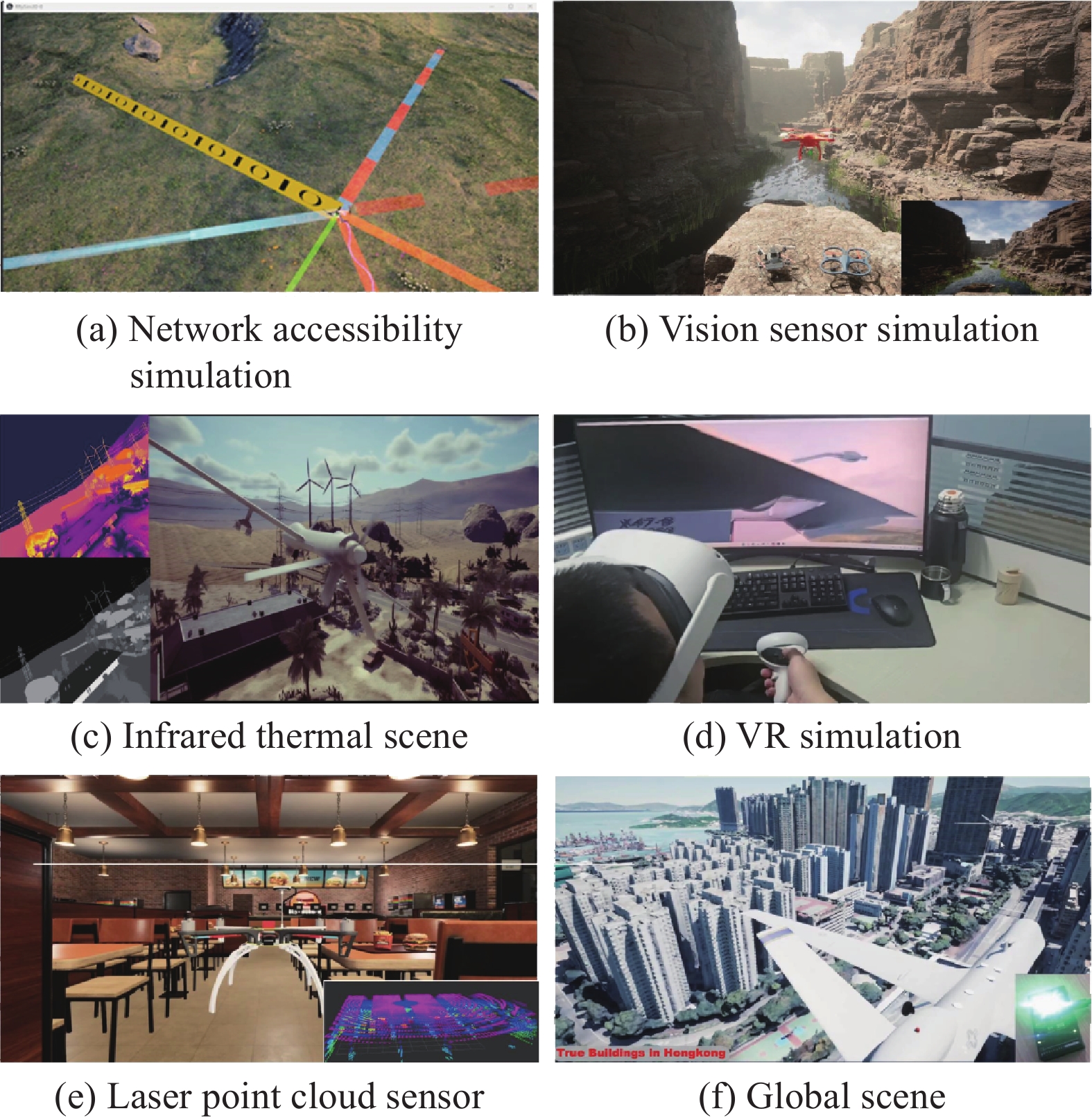
Fig 7
Multi-configuration unmanned vehicle case of RflySim ToolChain"
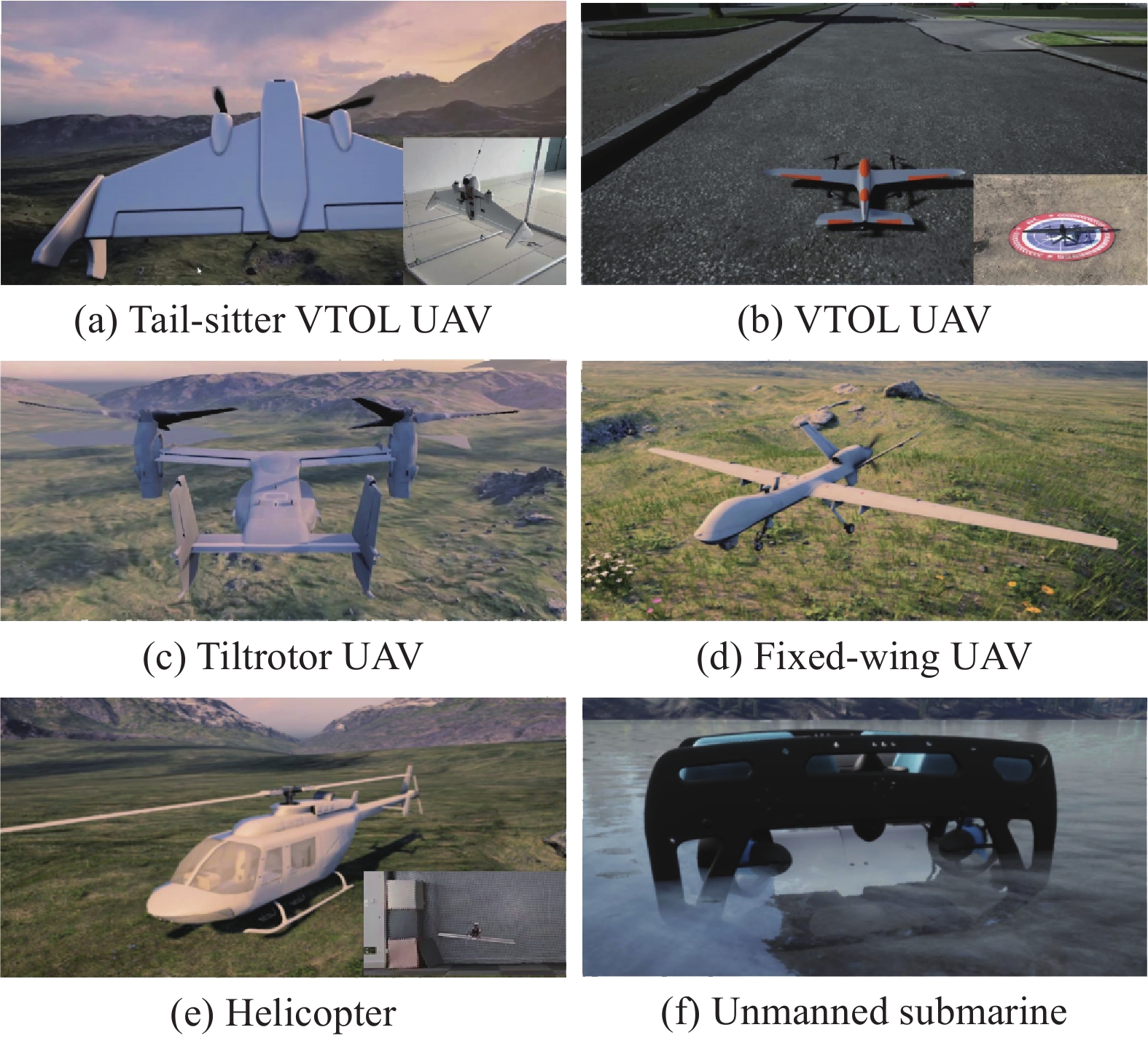
Fig 8
Unmanned system collaborative control and decision-making case of RflySim ToolChain"
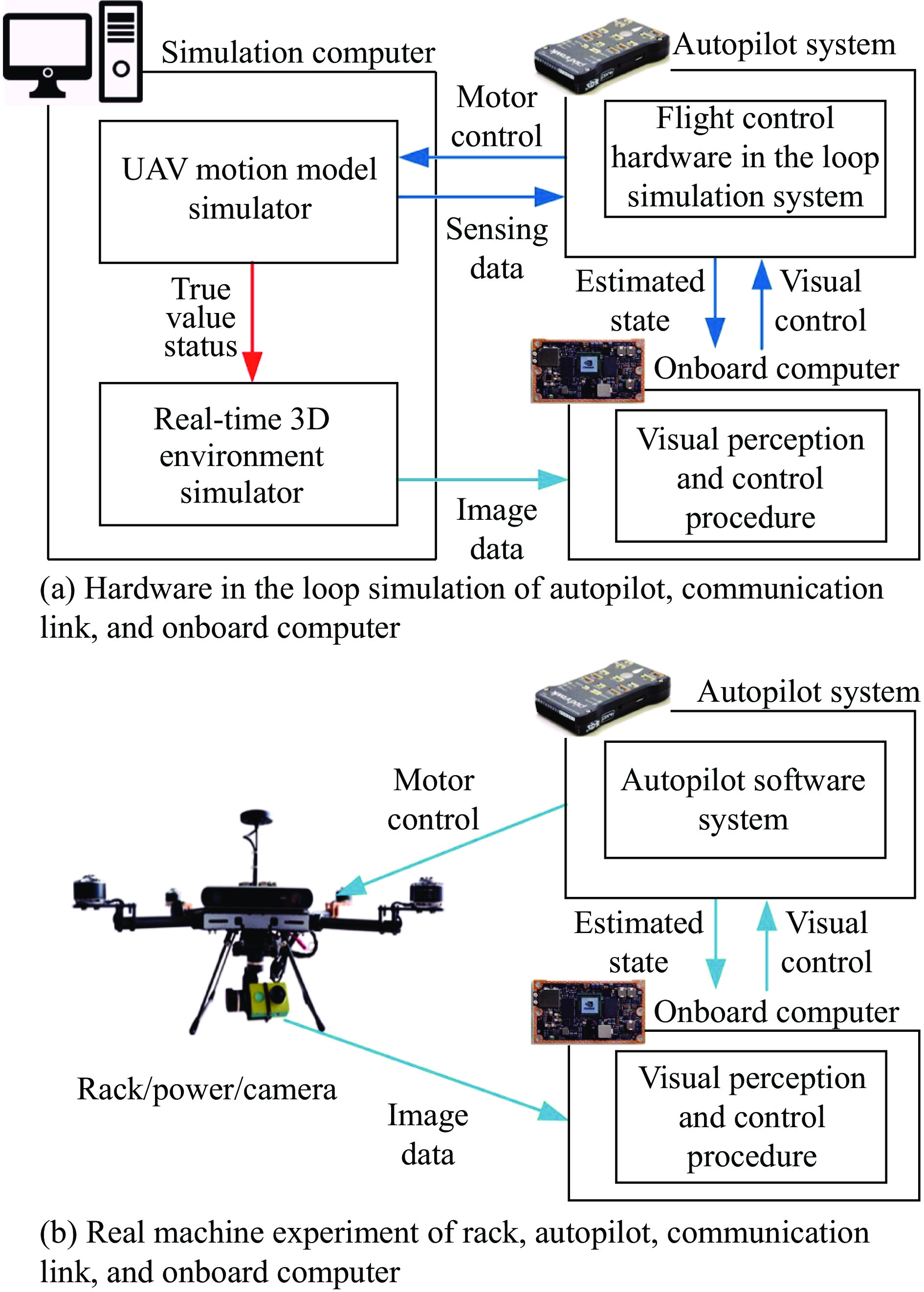
Fig 9
Rapid deployment architecture solution of Sim2Real"
Table 3
Performance test results in different scenarios"
| Mission scenario | Indicator | Value |
| Formation mission for a swarm of 100 UAVs | CPU usage/% | 10 |
| Memory usage/GB | 1.2 | |
| Simulation of a network of four UAVs with signal attenuation based on terrain | Average packet loss rate/% | 27.6 |
| Average delay rate/ms | 96.4 | |
| Validation of drone stationary flight accuracy (tracking error) | RMSE | |
| Quality of data from an inertial measurement unit (error compared to ground truth) | RMSE | |
| Safety test for a fault where a motor stops running | Simulation credibility/% | 64.02 |
| 1 |
PANG W J, MA X Y, LIANG X M, et al Role-based bayesian decision framework for autonomous unmanned systems. Journal of Systems Engineering and Electronics, 2023, 34 (6): 1397- 1408.
doi: 10.23919/JSEE.2023.000114 |
| 2 |
MOHSAN S A H, OTHMAN N Q H, LI Y, et al Unmanned aerial vehicles (UAVs): practical aspects, applications, open challenges, security issues, and future trends. Intelligent Service Robotics, 2023, 16 (1): 109- 137.
doi: 10.1007/s11370-022-00452-4 |
| 3 | OLLERO A, TOGNON M, SUAREZ A, et al Past, present, and future of aerial robotic manipulators. IEEE Trans. on Robotics, 2021, 38 (1): 626- 645. |
| 4 | FAHEY K, MILLER M. Unmanned systems integrated roadmap FY 2017–2042. https://apps.dtic.mil/sti/citations/AD1059546. |
| 5 | ZHANG F B, YU J, LIN D F, et al UnIC: towards unmanned intelligent cluster and its integration into society. Engineering, 2022, 12 (8): 24- 38. |
| 6 |
HOWARD J, MURASHOV V, BRANCHE C M Unmanned aerial vehicles in construction and worker safety. American Journal of Industrial Medicine, 2018, 61 (1): 3- 10.
doi: 10.1002/ajim.22782 |
| 7 | CHAMOLA V, KOTESH P, AGARWAL A, et al A comprehensive review of unmanned aerial vehicle attacks and neutralization techniques. Ad Hoc Networks, 2021, 111 (1): 102324. |
| 8 |
KE C X, CAI K Y, QUAN Q Analysis of a uniform passive faule-tolerant control method for multiapters. Journal of Systems Engineering and Electronics, 2024, 35 (6): 1574- 1582.
doi: 10.23919/JSEE.2024.000127 |
| 9 |
WORTH D B, WOOLLEY B G, HODSON D D SwarmSim: a framework for modeling swarming unmanned aerial vehicles using hardware-in-the-loop. The Journal of Defense Modeling and Simulation, 2021, 18 (2): 105- 124.
doi: 10.1177/1548512917715154 |
| 10 | BELCASTRO C M, KLYDE D H, LOGAN M J, et al. Experimental flight testing for assessing the safety of unmanned aircraft system safety-critical operations. Proc. of the 17th AIAA Aviation Technology, Integration, and Operations Conference, 2017. https://doi.org/10.2514/6.2017-3274. |
| 11 | NOUREEN S S, ROY V, BAYNE S B. An overall study of a real-time simulator and application of RT-LAB using MATLAB SimPowerSystems. Proc. of the IEEE Green Energy and Smart Systems Conference, 2017. https://doi.org/10.1109/IGESC.2017.8283453. |
| 12 | KOENIG N, HOWARD A. Design and use paradigms for gazebo, an open-source multi-robot simulator. Proc. of the IEEE/RSJ International Conference on Intelligent Robots and Systems, 2004: 2149−2154. |
| 13 | SHAH S, DEY D, LOVETT C, et al. AirSim: high-fidelity visual and physical simulation for autonomous vehicles. Proc. of the Field and Service Robotics: Results of the 11th International Conference, 2018: 621−635. |
| 14 | GUERRA W, TAL E, MURALI V, et al. FlightGoggles: photorealistic sensor simulation for perception-driven robotics using photogrammetry and virtual reality. Proc. of the IEEE/RSJ International Conference on Intelligent Robots and Systems, 2019: 6941−6948. |
| 15 | SONG Y, NAJI S, KAUFMANN E, et al. Flightmare: a flexible quadrotor simulator. Proc. of the Conference on Robot Learning, 2021: 1147−1157. |
| 16 |
CUI C, ZHOU X B, WANG M, et al FastSim: a modular and plug-and-play simulator for aerial robots. IEEE Robotics and Automation Letters, 2024, 9 (6): 5823- 5830.
doi: 10.1109/LRA.2024.3391059 |
| 17 | LI G R, LIU X Y, LOIANNO G RotorTM: a flexible simulator for aerial transportation and manipulation. IEEE Trans. on Robotics, 2024, 40 (2): 831- 850. |
| 18 | FERNANDEZ C M, MOLINA M, ARIAS P, et al. Aerostack2: a software framework for developing multi-robot aerial systems. https://arxiv.org/abs/2303.18237. |
| 19 | DIMMIG C A, SILANO G, MCGUIRE K, et al. Survey of simulators for aerial robots. https://arxiv.org/abs/2311.02296. |
| 20 | TAI J J, WONG J, INNOCENTE M, et al. PyFlyt--UAV simulation environments for reinforcement learning research. https://arxiv.org/abs/2304.01305. |
| 21 | FOLK S, PAULOS J, KUMAR V. ROTORPY: a Python-based multirotor simulator with aerodynamics for education and research. https://arxiv.org/abs/2306.04485. |
| 22 | MATHWORKS. UAV toolbox. https://www.mathworks.com/products/uav.html. |
| 23 | HUANG Z H, BATRA S, CHEN T, et al. Quadswarm: a modular multi-quadrotor simulator for deep reinforcement learning with direct thrust control. https://arxiv.org/abs/2306.09537. |
| 24 | RICHTER D J, CALIX R A. Qplane: an open-source reinforcement learning toolkit for autonomous fixed wing aircraft simulation. Proc. of the 12th ACM Multimedia Systems Conference, 2021: 261−266. |
| 25 | QUAN Q, DAI X H, WANG S. Multicopter design and control practice: a series experiments based on MATLAB and Pixhawk. Singapore: Springer Nature, 2020. |
| 26 | DAI X H, KE C X, QUAN Q, et al RFlySim: automatic test platform for UAV autopilot systems with FPGA-based hardware-in-the-loop simulations. Aerospace Science and Technology, 2021, 114, 106727. |
| 27 | DAI X H, KE C X, QUAN Q, et al Simulation credibility assessment methodology with FPGA-based hardware-in-the-loop platform. IEEE Trans. on Industrial Electronics, 2020, 68 (4): 3282- 3291. |
| 28 | WANG S, DAI X H, KE C X, et al. RflySim: a rapid multicopter development platform for education and research based on Pixhawk and MATLAB. Proc. of the IEEE International Conference on Unmanned Aircraft Systems, 2021: 1587−1594. |
| 29 | QUAN Q, FU R, LI M X, et al Practical distributed control for VTOL UAVs to pass a virtual tube. IEEE Trans. on Intelligent Vehicles, 2021, 7 (2): 342- 353. |
| 30 | QUAN Q, GAO Y, BAI C G Distributed control for a robotic swarm to pass through a curve virtual tube. Robotics and Autonomous Systems, 2023, 162, 104368. |
| 31 |
MAO P D, FU R, QUAN Q Optimal virtual tube planning and control for swarm robotics. The International Journal of Robotics Research, 2024, 43 (5): 602- 627.
doi: 10.1177/02783649231210012 |
| 32 | FEISI L. Introduction: what is RflySim? https://rflysim.com/doc/en/. |
| 33 | FEISI L. Lesson 3: 3D scene modeling and simulation. https://rflysim.com/doc/en/3/Intro.html. |
| 34 | FEISI L. Lesson 4: modeling and simulation of vehicle motion. https://rflysim.com/doc/en/4/Intro.html. |
| 35 | FEISI L. Lesson 6: external control and trajectory planning. https://rflysim.com/doc/en/6/Intro.html. |
| 36 | FEISI L. Lesson 7: safety testing and health assessment. https://rflysim.com/doc/en/7/Intro.html. |
| 37 | FEISI L. Lesson 8: visual perception and obstacle avoidance decision-making. https://rflysim.com/doc/en/8/Intro.html. |
| 38 | FEISI L. Lesson 10: cluster control and game confrontation. https://rflysim.com/doc/en/10/Intro.html. |
| [1] | Linmeng WANG, Yuhui WANG, Mou CHEN, Shulin DING. Multi-round dynamic game decision-making of UAVs based on decision tree [J]. Journal of Systems Engineering and Electronics, 2025, 36(4): 1006-1016. |
| [2] | Ning WANG, Xiaolong LIANG, Zhe LI, Yueqi HOU, Aiwu YANG. Joint planning method for cross-domain unmanned swarm target assignment and mission trajectory [J]. Journal of Systems Engineering and Electronics, 2025, 36(3): 736-753. |
| [3] | Hongen LI, Shilong LI, Qi WANG, Xiaoming HUANG. AUV 3D path planning based on improved PSO [J]. Journal of Systems Engineering and Electronics, 2025, 36(3): 854-866. |
| [4] | Jingfeng GUO, Rui SONG, Shiwei HE. Aerial-ground collaborative delivery route planning with UAV energy function and multi-delivery [J]. Journal of Systems Engineering and Electronics, 2025, 36(2): 446-461. |
| [5] | Gang LIU, Xinyuan GUO, Dong HUANG, Kezhong CHEN, Wu LI. Multi-platform collaborative MRC-PSO algorithm for anti-ship missile path planning [J]. Journal of Systems Engineering and Electronics, 2025, 36(2): 494-509. |
| [6] | Weining MA, Enzhi DONG, Hua LI, Mei ZHAO. Selective maintenance decision optimization for systems executing multi-mission under stochastic mission duration [J]. Journal of Systems Engineering and Electronics, 2025, 36(1): 209-223. |
| [7] | Yimin FENG, Ping GE, Yanli SHAO, Qiang ZOU, Yusheng LIU. UAF-based integration of design and simulation model for system-of-systems [J]. Journal of Systems Engineering and Electronics, 2025, 36(1): 108-126. |
| [8] | Yuelong LUO, Xiuqiang JIANG, Suchuan ZHONG, Yuandong JI. Air-to-ground reconnaissance-attack task allocation for heterogeneous UAV swarm [J]. Journal of Systems Engineering and Electronics, 2025, 36(1): 155-175. |
| [9] | Jingfeng GUO, Rui SONG, Shiwei HE. Vehicle and onboard UAV collaborative delivery route planning: considering energy function with wind and payload [J]. Journal of Systems Engineering and Electronics, 2025, 36(1): 194-208. |
| [10] | Hongcheng YIN, Hua YAN. Parametric modeling and applications of target scattering centers: a review [J]. Journal of Systems Engineering and Electronics, 2024, 35(6): 1411-1427. |
| [11] | Pengfei WANG, Jinfeng HU, Wen HU, Weiguang WANG, Hao DONG. Anti-swarm UAV radar system based on detection data fusion [J]. Journal of Systems Engineering and Electronics, 2024, 35(5): 1167-1176. |
| [12] | Wei LI, Yue WANG, Lijuan JIA, Senran PENG, Ruixi HE. Battlefield target intelligence system architecture modeling and system optimization [J]. Journal of Systems Engineering and Electronics, 2024, 35(5): 1190-1210. |
| [13] | Guang ZHAN, Kun ZHANG, Ke LI, Haiyin PIAO. UAV maneuvering decision-making algorithm based on deep reinforcement learning under the guidance of expert experience [J]. Journal of Systems Engineering and Electronics, 2024, 35(3): 644-665. |
| [14] | Jiandong ZHANG, Yukun GUO, Lihui ZHENG, Qiming YANG, Guoqing SHI, Yong WU. Real-time UAV path planning based on LSTM network [J]. Journal of Systems Engineering and Electronics, 2024, 35(2): 374-385. |
| [15] | Jinyang CHEN, Xuhua WANG, Xian CHEN. Track correlation algorithm based on CNN-LSTM for swarm targets [J]. Journal of Systems Engineering and Electronics, 2024, 35(2): 417-429. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||