
Journal of Systems Engineering and Electronics ›› 2025, Vol. 36 ›› Issue (6): 1679-1691.doi: 10.23919/JSEE.2025.000094
• CONTROL THEORY AND APPLICATION • Previous Articles
Bin FENG( ), Weihua FAN(), Yang GAO(), Qingwei CHEN()
), Weihua FAN(), Yang GAO(), Qingwei CHEN()
Received:2024-09-27
Online:2025-12-18
Published:2026-01-07
Contact:
Weihua FAN
E-mail:fengbin@njust.edu.cn;fanweihua@njust.edu.cn;gaoyang_zdh@njust.edu.cn;cqw1002@sina.com
About author:Supported by:Bin FENG, Weihua FAN, Yang GAO, Qingwei CHEN. Active disturbance rejection control based on cascade high-order extended state observer for systems with time-varying disturbances and measurement noise[J]. Journal of Systems Engineering and Electronics, 2025, 36(6): 1679-1691.
Fig 1
Bode magnitude diagram of disturbance rejection for the HESO under different orders"
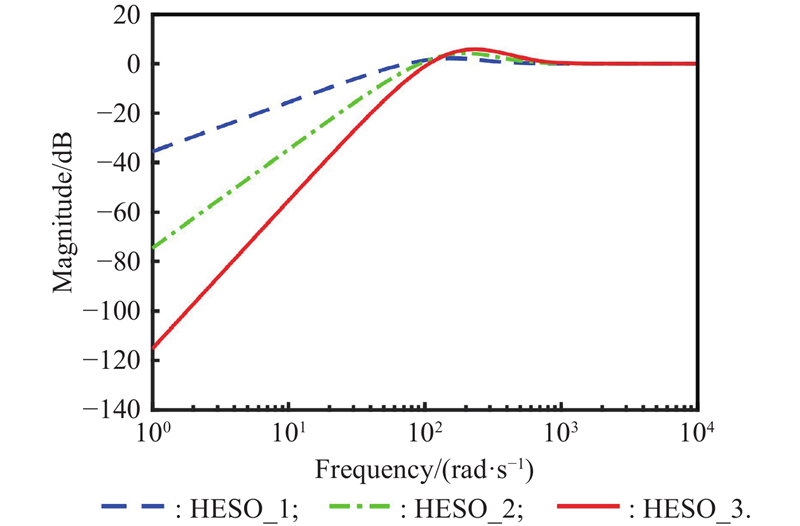
Fig 2
Bode magnitude diagram of noise suppression for HESO under different orders"
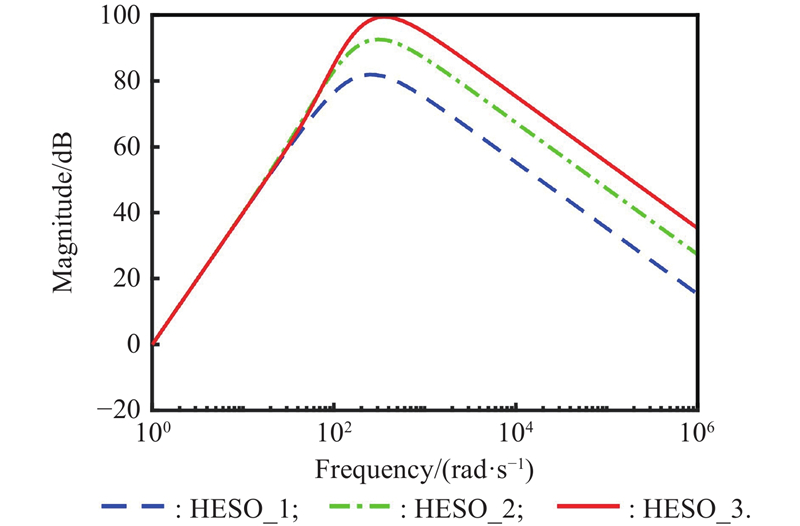
Fig 3
Block diagram of CHESO"
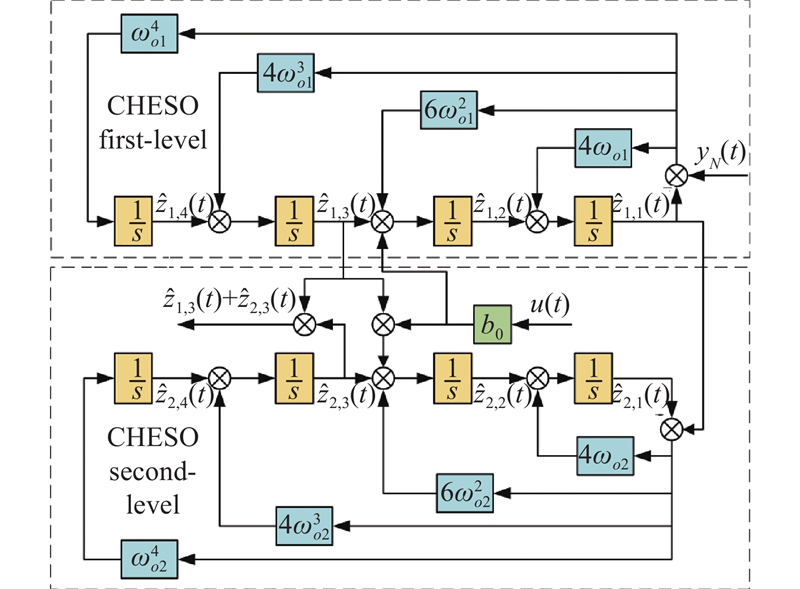
Fig 4
Control block diagram CHESO-based ADRC"
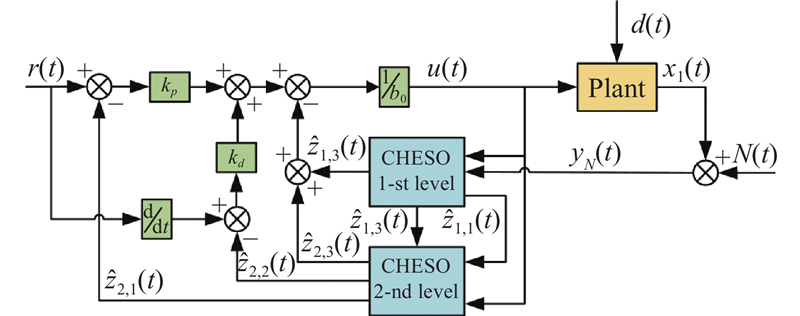
Fig 5
Bode magnitude diagram of disturbance rejection for ESO, HESO, and CHESO "
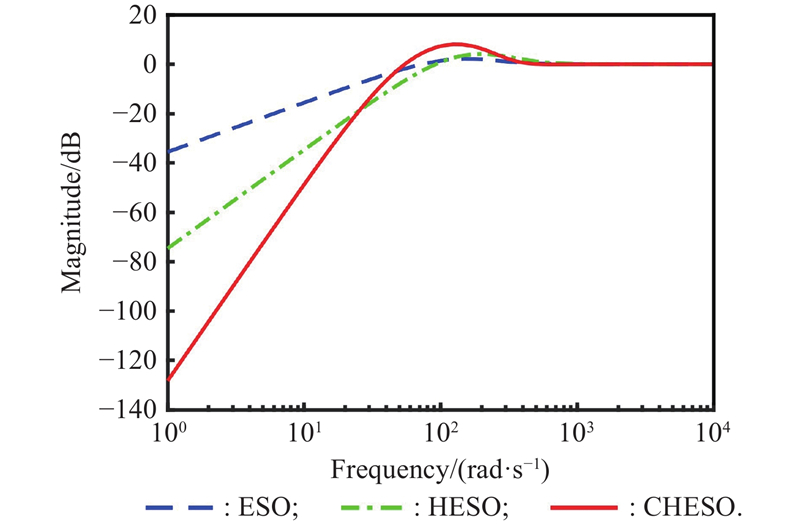
Fig 6
Bode magnitude diagram of noise suppression for ESO, HESO, and CHEO "
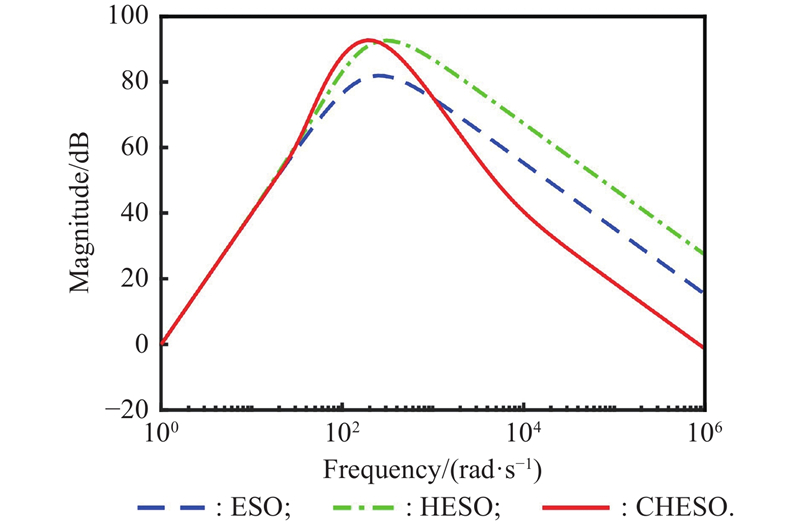
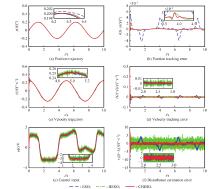
Fig 7
Results of low-frequency trajectory tracking"
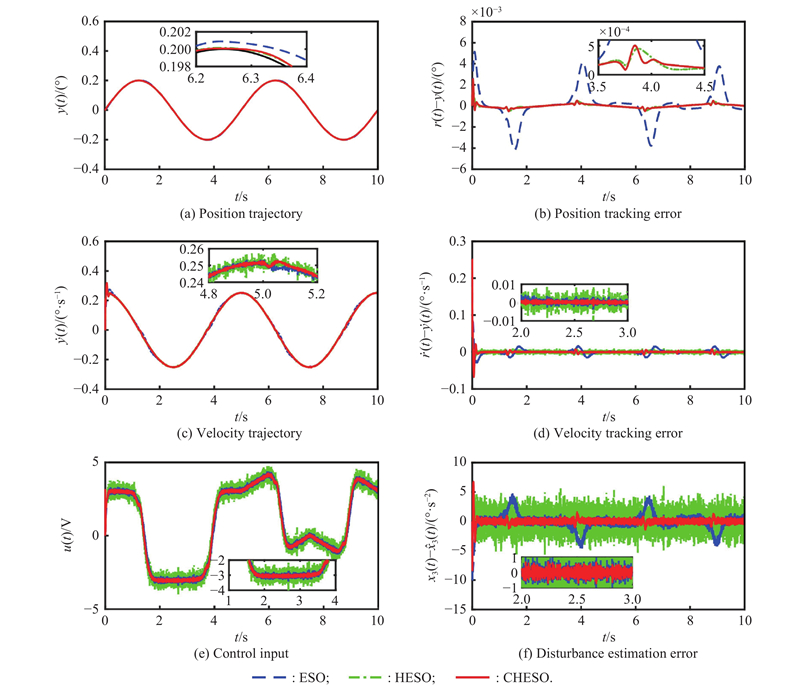
Table 1
Performance integral criteria of low-frequency trajectory tracking"
| Integral criteria | Observer type | ||
| ESO | HESO | CHESO | |
| 0.048 | 0.028 | 0.014 | |
| 23.45 | 23.62 | 23.55 | |
| 289.5 | 746.0 | 119.0 | |
| 8.54 | 12.52 | 2.71 | |

Fig 8
FFT of control input and disturbance estimation error"
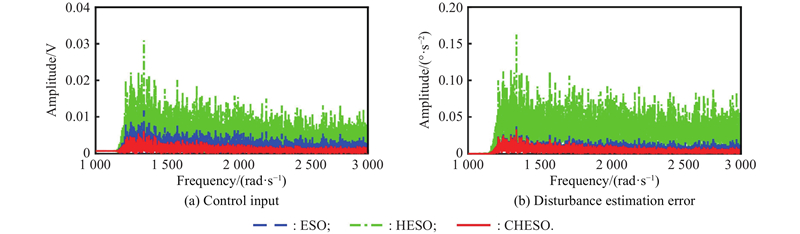

Fig 9
Results of disturbance isolation"


Fig 10
Comparison of RMSE under disturbance with different frequencies"
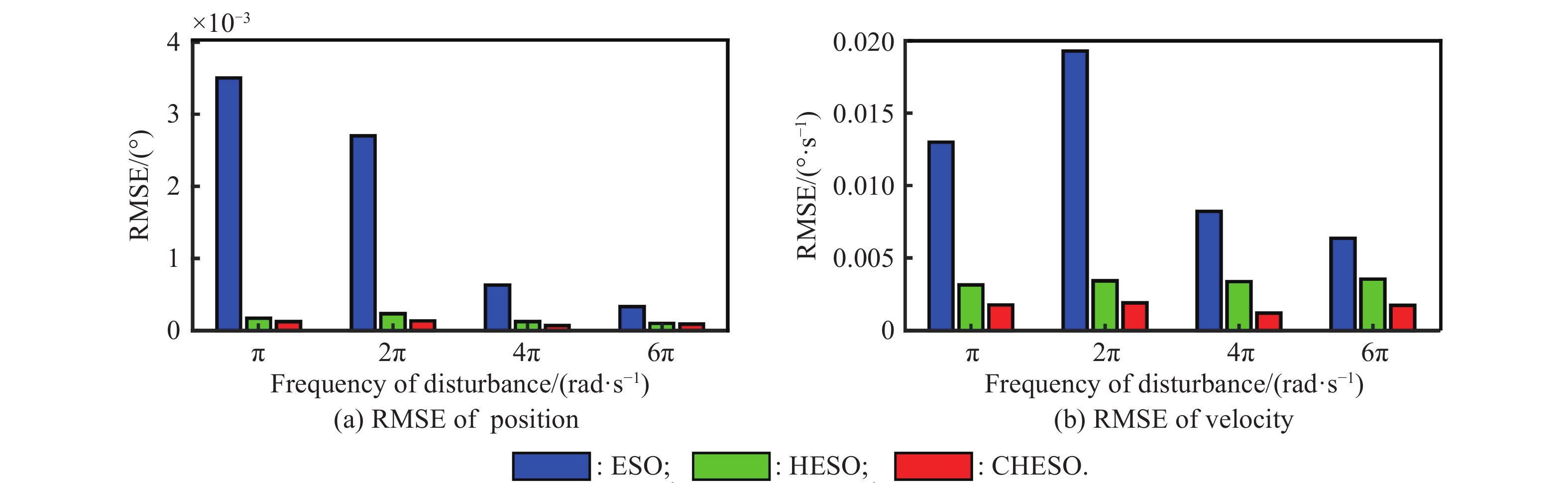
Table 2
Comparison for ESO, HESO, and CHESO"
| Index of comparison | ESO | HESO | CHESO |
| Number of observer state variables | 3 | 4 | 8 |
| Observer design complexity | Lower | Medium | Higher |
| Disturbance estimation accuracy | Lower | Medium | Higher |
| Disturbance rejection ability at low frequency | Lower | Medium | Higher |
| Noise suppression ability at high frequency | Medium | Lower | Higher |
| 1 |
CHEN S, CHEN Z X On active disturbance rejection control for a class of uncertain systems with measurement uncertainty. IEEE Trans. on Industrial Electronics, 2021, 68 (2): 1475- 1485.
doi: 10.1109/TIE.2020.2970623 |
| 2 |
WANG C L, GUO L, WEN C Y, et al Adaptive anti-disturbance control for a class of uncertain nonlinear systems with composite disturbances. IEEE Trans. on Cybernetics, 2024, 54 (7): 4241- 4254.
doi: 10.1109/TCYB.2023.3295785 |
| 3 |
ZHANG S H, QI X H, YANG S An extended state observer with adjustable bandwidth for measurement noise. Journal of Systems Engineering and Electronics, 2024, 35 (1): 233- 241.
doi: 10.23919/JSEE.2023.000166 |
| 4 |
GUO B Z, WU Z H, ZHOU H C Active disturbance rejection control approach to output-feedback stabilization of a class of uncertain nonlinear systems subject to stochastic disturbance. IEEE Trans. on Automatic Control, 2016, 61 (6): 1613- 1618.
doi: 10.1109/TAC.2015.2471815 |
| 5 |
TIAN D P, XU R, SARIYILDIZ E, et al An adaptive switching-gain sliding-mode-assisted disturbance observer for high-precision servo control. IEEE Trans. on Industrial Electronics, 2022, 69 (2): 1762- 1772.
doi: 10.1109/TIE.2021.3057004 |
| 6 |
LI J, ZHANG L Y, LI S Q, et al A time delay estimation interpretation of extended state observer-based controller with application to structural vibration suppression. IEEE Trans. on Automation Science and Engineering, 2024, 21 (2): 1965- 1973.
doi: 10.1109/TASE.2023.3253504 |
| 7 |
YIN X, SHI Y T, SHE J H, et al Nonlinearity and disturbance compensation based on improved equivalent-input-disturbance approach. IEEE/ASME Trans. on Mechatronics, 2024, 29 (1): 703- 714.
doi: 10.1109/TMECH.2023.3290564 |
| 8 |
HAN J Q From PID to active disturbance rejection control. IEEE Trans. on Industrial Electronics, 2009, 56 (3): 900- 906.
doi: 10.1109/TIE.2008.2011621 |
| 9 |
WANG Y S, LIU J J, CHEN Z Q, et al On the stability and convergence rate analysis for the nonlinear uncertain systems based upon active disturbance rejection control. International Journal of Robust and Nonlinear Control, 2020, 30 (14): 5728- 5750.
doi: 10.1002/rnc.5103 |
| 10 |
WANG S H, GAN H, LUO Y, et al Active disturbance rejection control with fractional-order model-aided extended state observer. ISA Transactions, 2023, 142, 527- 537.
doi: 10.1016/j.isatra.2023.07.020 |
| 11 |
XU L C, ZHUO S R, LIU J X, et al Advancement of active disturbance rejection control and its applications in power electronics. IEEE Trans. on Industry Applications, 2024, 60 (1): 1680- 1694.
doi: 10.1109/TIA.2023.3312653 |
| 12 |
CHANG Y F, ZHOU F F, YAN H C, et al Noise and interference suppression control method of DC-DC buck converters based on cascaded filter LADRC. International Journal of Control, Automation and Systems, 2024, 22 (5): 1526- 1536.
doi: 10.1007/s12555-023-0003-9 |
| 13 |
WANG Y W, ZHANG W A, YU L A linear active disturbance rejection control approach to position synchronization control for networked interconnected motion system. IEEE Trans. on Control of Network Systems, 2020, 7 (4): 1746- 1756.
doi: 10.1109/TCNS.2020.2999305 |
| 14 |
WU Z L, LI D H, LIU Y H, et al Performance analysis of improved ADRCs for a class of high-order processes with verification on main steam pressure control. IEEE Trans. on Industrial Electronics, 2023, 70 (6): 6180- 6190.
doi: 10.1109/TIE.2022.3192687 |
| 15 |
ZHUO S R, GAILLARD A, XU L C, et al Enhanced robust control of a DC–DC converter for fuel cell application based on high-order extended state observer. IEEE Trans. on Transportation Electrification, 2020, 6 (1): 278- 287.
doi: 10.1109/TTE.2020.2974582 |
| 16 | HOU Q K, DING S H GPIO based super-twisting sliding mode control for PMSM. IEEE Trans. on Circuits and Systems II: Express Briefs, 2021, 68 (2): 747- 751. |
| 17 | FENG B, FAN W H, CHENG Q W. A robust sliding mode control for electro-optical stabilized servo tracking system based on extended state observer and adaptive neural network. Proc. of the 18th International Conference on Control, Automation, Robotics and Vision, 2024: 660−665. |
| 18 |
AHMAD S, ALI A On active disturbance rejection control in presence of measurement noise. IEEE Trans. on Industrial Electronics, 2022, 69 (11): 11600- 11610.
doi: 10.1109/TIE.2021.3121754 |
| 19 | FENG B, FAN W H, CHENG Q W, et al. A modified active disturbance rejection control strategy for DC servo system with external disturbance and measurement noise. Proc. of the 42th Chinese Control Conference, 2023: 2868−2874. |
| 20 |
CHEN W H, YANG J, GUO L, et al Disturbance-observer-based control and related methods—an overview. IEEE Trans. on Industrial Electronics, 2016, 63 (2): 1083- 1095.
doi: 10.1109/TIE.2015.2478397 |
| 21 |
GODBOLE A A, KOLHE J P, TALOLE S E Performance analysis of generalized extended state observer in tackling sinusoidal disturbances. IEEE Trans. on Control Systems Technology, 2013, 21 (6): 2212- 2223.
doi: 10.1109/TCST.2012.2231512 |
| 22 | ZHU S F, HUANG W X, ZHAO Y J, et al Robust speed control of electrical drives with reduced ripple using adaptive switching high-order extended state observer. IEEE Trans. on Power Electronics, 2022, 37 (2): 2009- 2020. |
| 23 |
LAKOMY K, MADONSKI R, DAI B, et al Active disturbance rejection control design with suppression of sensor noise effects in application to DC–DC buck power converter. IEEE Trans. on Industrial Electronics, 2022, 69 (1): 816- 824.
doi: 10.1109/TIE.2021.3055187 |
| 24 |
DU Y W, CAO W H, SHE J H Analysis and design of active disturbance rejection control with an improved extended state observer for systems with measurement noise. IEEE Trans. on Industrial Electronics, 2023, 70 (1): 855- 865.
doi: 10.1109/TIE.2022.3153821 |
| 25 |
SUN H, MADONSKI R, LI S H, et al Composite control design for systems with uncertainties and noise using combined extended state observer and Kalman filter. IEEE Trans. on Industrial Electronics, 2022, 69 (4): 4119- 4128.
doi: 10.1109/TIE.2021.3075838 |
| 26 |
LAKOMY K, MADONSKI R Cascade extended state observer for active disturbance rejection control applications under measurement noise. ISA Transactions, 2021, 109, 1- 10.
doi: 10.1016/j.isatra.2020.09.007 |
| 27 |
BABAYOMI O, ZHANG Z B Model-free predictive control of power converters with cascade-parallel extended state observers. IEEE Trans. on Industrial Electronics, 2023, 70 (10): 10215- 10226.
doi: 10.1109/TIE.2022.3217609 |
| 28 |
BABAYOMI O, ZHANG Z B Model-free predictive control of power converters with multifrequency extended state observers. IEEE Trans. on Industrial Electronics, 2023, 70 (11): 11379- 11389.
doi: 10.1109/TIE.2022.3225819 |
| 29 |
MIRONCHENKO A Local input-to-state stability: characterizations and counterexamples. Systems Control Letters, 2016, 87, 23- 28.
doi: 10.1016/j.sysconle.2015.10.014 |
| 30 | GAO Z Q. Scaling and bandwidth-parameterization based controller tuning. Proc. of the American Control Conference, 2003: 4989−4996. |
| [1] | Yuanqing XIA, Zhongqi SUN, Li DAI, Yufeng ZHAN, Dihua ZHAI, Wenjun ZHAO, Fan PU. Differential flatness ADRC for high-speed steering of tracked tank systems [J]. Journal of Systems Engineering and Electronics, 2025, 36(6): 1665-1678. |
| [2] | Honghao MA, Xiao WANG, Shan GAO, Yu ZHANG. Analysis of high precision detection technique based on optical MEMS accelerometer with double gratings [J]. Journal of Systems Engineering and Electronics, 2025, 36(5): 1335-1341. |
| [3] | Jie LI, Yuanqing XIA. On stability analysis of nonlinear ADRC-based control system with application to inverted pendulum problems [J]. Journal of Systems Engineering and Electronics, 2024, 35(6): 1563-1573. |
| [4] | Shihua ZHANG, Xiaohui QI, Sen YANG. An extended state observer with adjustable bandwidth for measurement noise [J]. Journal of Systems Engineering and Electronics, 2024, 35(1): 233-241. |
| [5] | Xinjian MA, Shiqian LIU, Huihui CHENG. Civil aircraft fault tolerant attitude tracking based on extended state observers and nonlinear dynamic inversion [J]. Journal of Systems Engineering and Electronics, 2022, 33(1): 180-187. |
| [6] | Yiru ZOU, Chunsheng LIU, Ke LU. Extended state observer based smooth switching control for tilt-rotor aircraft [J]. Journal of Systems Engineering and Electronics, 2020, 31(4): 815-825. |
| [7] | Junjie LIU, Mingwei SUN, Zengqiang CHEN, Qinglin SUN. High AOA decoupling control for aircraft based on ADRC [J]. Journal of Systems Engineering and Electronics, 2020, 31(2): 393-402. |
| [8] | Ligang GONG, Qing WANG, Chaoyang DONG. Switching disturbance rejection attitude control of near space vehicles with variable structure [J]. Journal of Systems Engineering and Electronics, 2019, 30(1): 167-179. |
| [9] | Yuhang YUN, Shengjing TANG, Jie GUO, Wei SHANG. Robust controller design for compound control missile with fixed bounded convergence time [J]. Journal of Systems Engineering and Electronics, 2018, 29(1): 116-133. |
| [10] | Wei Shang, Shengjing Tang, Jie Guo, Yueyue Ma, and Yuhang Yun. Robust sliding mode control with ESO for dual-control missile [J]. Journal of Systems Engineering and Electronics, 2016, 27(5): 1073-1082. |
| [11] | Yueyue Ma, Jie Guo, and Shengjing Tang. BTT autopilot design for agile missiles with aerodynamic uncertainty [J]. Journal of Systems Engineering and Electronics, 2015, 26(4): 802-. |
| [12] | Ruiguang Yang, Mingwei Sun, and Zengqiang Chen. Active disturbance rejection control on first-order plant [J]. Journal of Systems Engineering and Electronics, 2011, 22(1): 95-102. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||