
Journal of Systems Engineering and Electronics ›› 2026, Vol. 37 ›› Issue (1): 18-25.doi: 10.23919/JSEE.2026.000013
• PERCEPTION, CONTROL, AND DECISION-MAKING OF EMBODIED INTELLIGENT SYSTEMS • Previous Articles Next Articles
Yufei LI1( ), Yuezu LYU2,*(), Wenliang PENG3,*()
), Yuezu LYU2,*(), Wenliang PENG3,*()
Received:2025-10-15
Online:2026-02-18
Published:2026-03-09
Contact:
Yuezu LYU, Wenliang PENG
E-mail:3420205019@bit.edu.cn;yzlv@bit.edu.cn;6220201059@bit.edu.cn
About author:Supported by:Yufei LI, Yuezu LYU, Wenliang PENG. Formation control for multiple spacecraft with disturbances and sensor failures[J]. Journal of Systems Engineering and Electronics, 2026, 37(1): 18-25.
Add to citation manager EndNote|Reference Manager|ProCite|BibTeX|RefWorks

Fig 1
Strongly connected graph $ {{\boldsymbol{G}}} $"
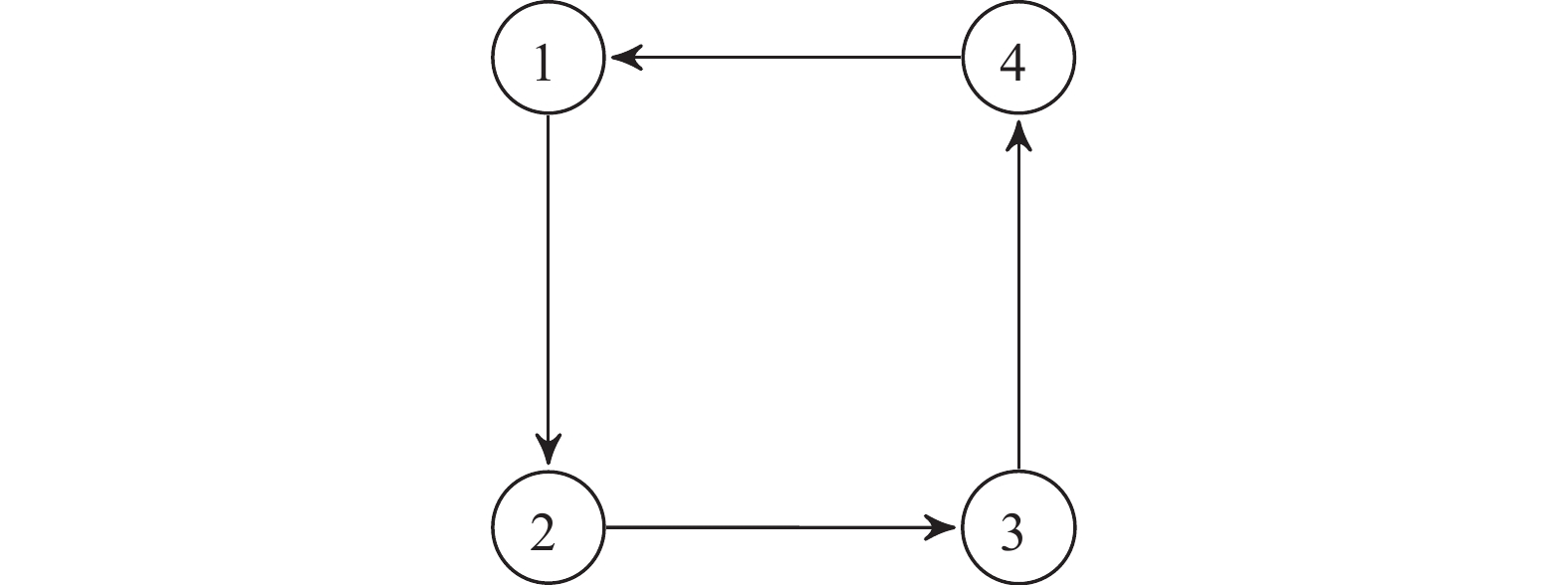
Fig 2
Trajectories of the spacecraft with $ {\boldsymbol{t}}{\boldsymbol{\in }}{\boldsymbol{[390,}}\,{\boldsymbol{400]}} $s"
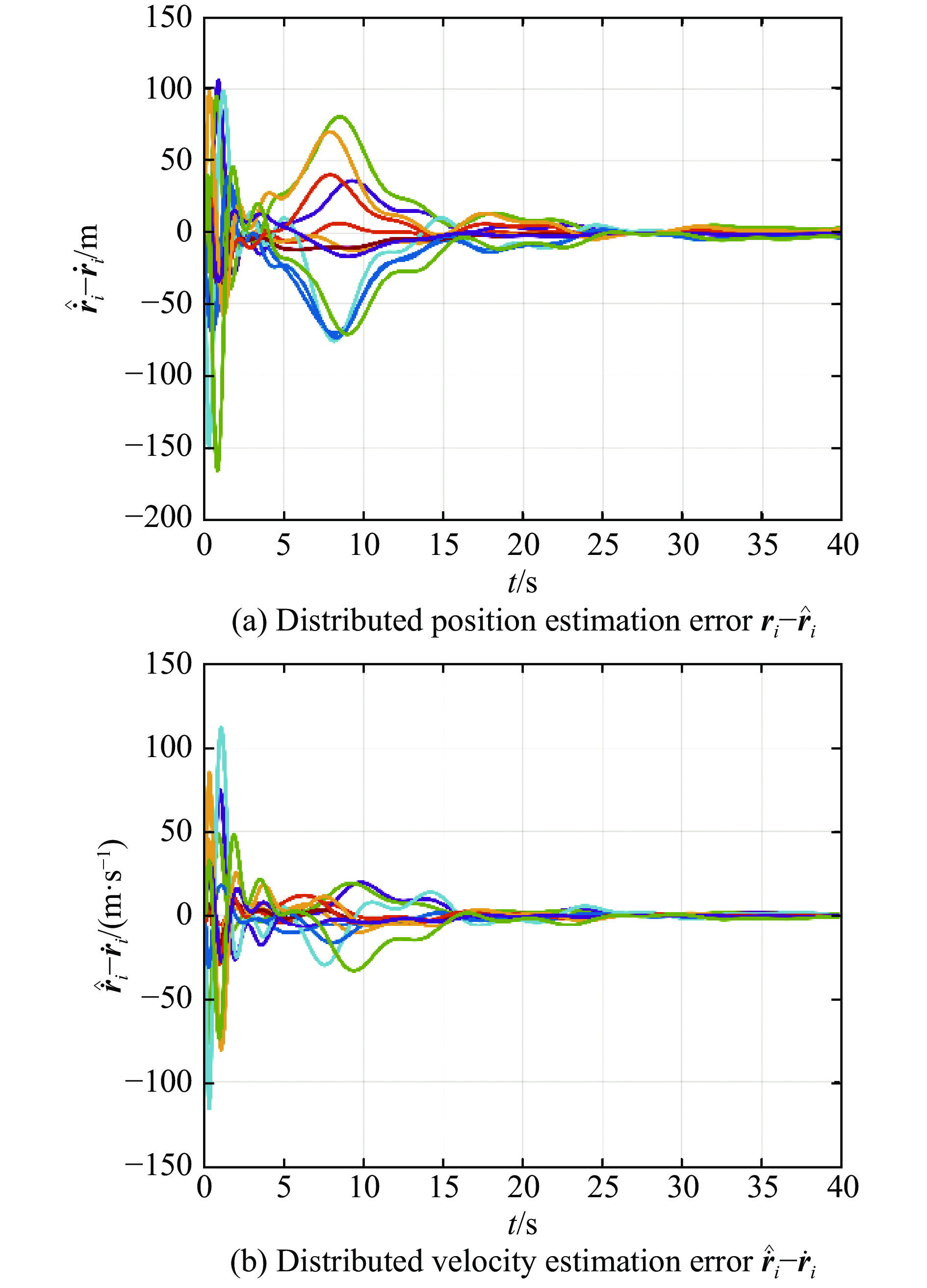
Fig 3
Distributed state estimation error $ \tilde{{\boldsymbol{s}}} $ with $ {\boldsymbol{t}}{\boldsymbol{\in}} {\boldsymbol{[0,}}\;{\boldsymbol{40]}} $ s"
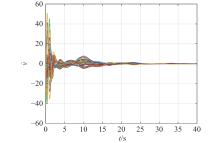
Fig 4
Distributed output estimation error $ \tilde{{\boldsymbol{v}}} $ with $ {\boldsymbol{t}}{\boldsymbol{\in}} {\boldsymbol{[0,}}\;{\boldsymbol{40]}} $ s"
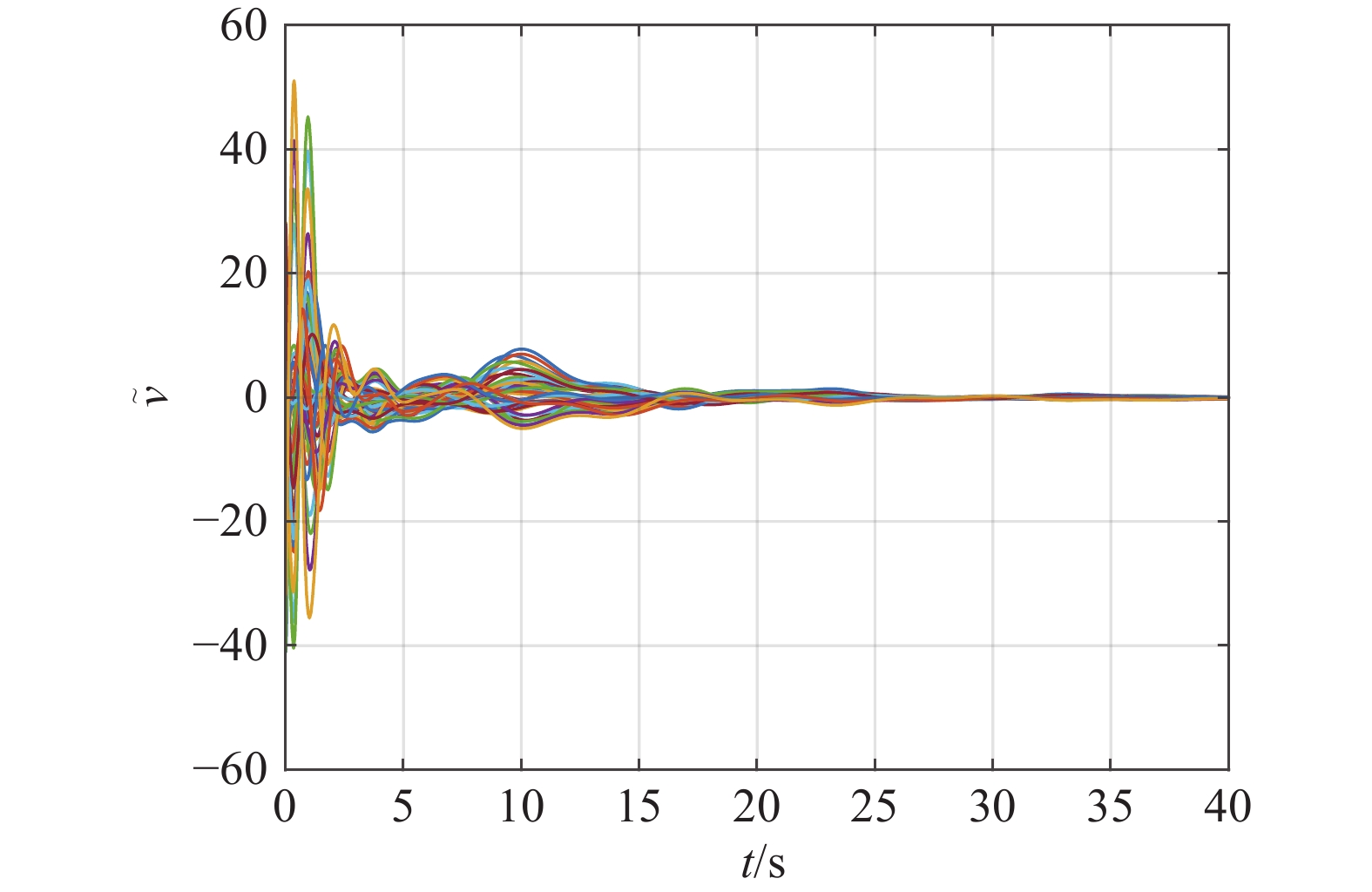
Fig 5
Relative speed of spacecraft along the $ {\boldsymbol{ox}} $ axis"
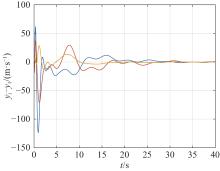
Fig 6
Relative speed of spacecraft along the $ {\boldsymbol{oy}} $ axis"
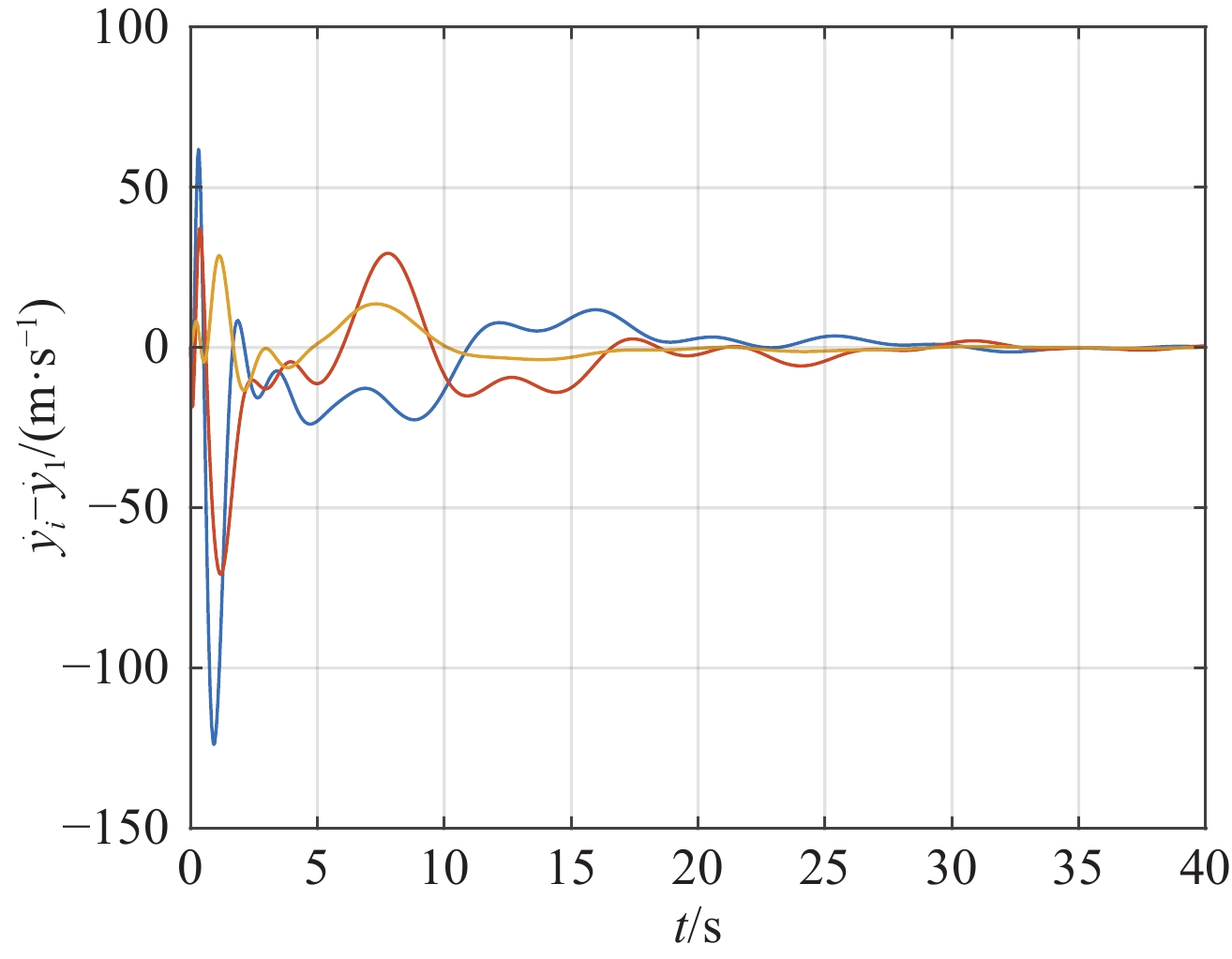
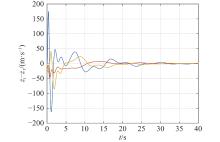
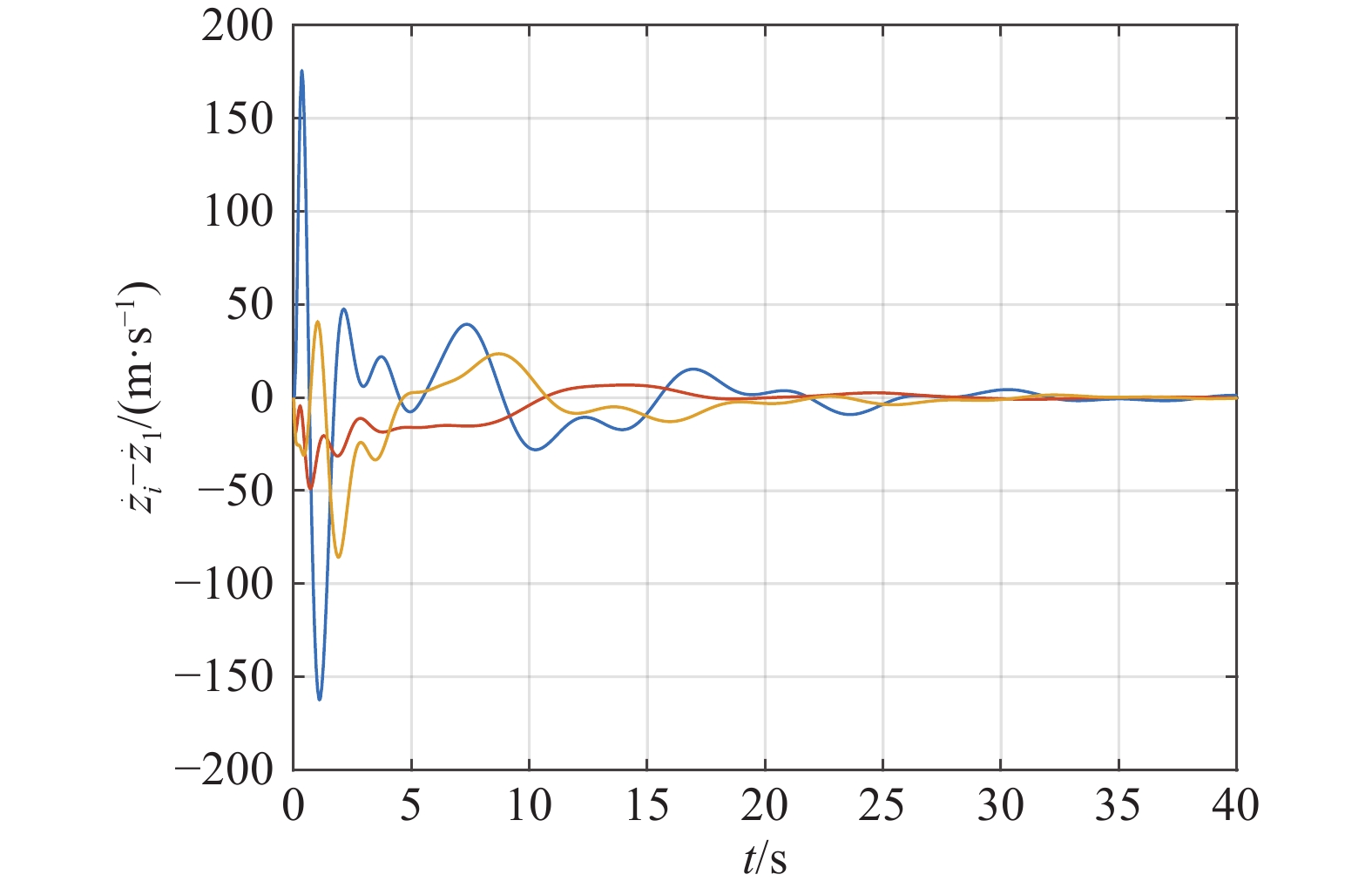
Fig 7
Relative speed of spacecraft along $ {\boldsymbol{oz}} $ axis"
| 1 |
CHEN G R Optimal synchronization of higher-order dynamical networks. Artificial Intelligence Science and Engineering, 2025, 1 (1): 31- 36.
doi: 10.23919/AISE.2025.000003 |
| 2 |
REN Y X, LIU W M, WANG S L, et al High-accuracy tracking control for uncertain robot manipulators: a sparse online Gaussian process approach. Robotic Intelligence and Automation, 2025, 45 (2): 273- 282.
doi: 10.1108/RIA-10-2024-0237 |
| 3 |
OH K, PARK M, AHN H A survey of multi-agent formation control. Automatica, 2015, 53, 424- 440.
doi: 10.1016/j.automatica.2014.10.022 |
| 4 |
BRIINON-ARRANZ L, SEURET A, CANUDAS-DE-WIT C Cooperative control design for time-varying formations of multi-agent systems. IEEE Trans. on Automatic Control, 2014, 59 (8): 2283- 2288.
doi: 10.1109/TAC.2014.2303213 |
| 5 |
DONG X W, ZHOU Y, REN Z, et al Time-varying formation tracking for second-order multi-agent systems subjected to switching topologies with application to quadrotor formation flying. IEEE Trans. on Industrial Electronics, 2017, 64 (6): 5014- 5024.
doi: 10.1109/TIE.2016.2593656 |
| 6 |
FRANCHI A, GIORDANO P R, MICHIELETTO G Online leader selection for collective tracking and formation control: the second-order case. IEEE Trans. on Control of Network Systems, 2019, 6 (4): 1415- 1425.
doi: 10.1109/TCNS.2019.2891011 |
| 7 |
ZHAO Y, DUAN Q X, WEN G H, et al Time-varying formation for general linear multiagent systems over directed topologies: a fully distributed adaptive technique. IEEE Trans. on Systems, Man, and Cybernetics: Systems, 2021, 51 (1): 532- 541.
doi: 10.1109/TSMC.2018.2877818 |
| 8 |
CHEN L M, CAO M, LI C J Angle rigidity and its usage to stabilize multiagent formations in 2-D. IEEE Trans. on Automatic Control, 2021, 66 (8): 3667- 3681.
doi: 10.1109/TAC.2020.3025539 |
| 9 | ZHAO Y X, HAO Y Q, WANG Q S, et al A rigid formation control approach for multi-agent systems with curvature constraints. IEEE Trans. on Circuits and Systems II: Express Briefs, 2021, 68 (11): 3431- 3435. |
| 10 |
FU J J, LV Y Z, WEN G H, et al Local measurement based formation navigation of nonholonomic robots with globally bounded inputs and collision avoidance. IEEE Trans. on Network Science and Engineering, 2021, 8 (3): 2342- 2354.
doi: 10.1109/TNSE.2021.3089833 |
| 11 | CAJO R, GUINALDO M, FABREGAS E, et al Distributed formation control for multiagent systems using a fractional-order proportional-integral structure. IEEE Trans. on Control Systems Technology, 2021, 29 (6): 2738- 2745. |
| 12 |
ZHANG Z H, YUAN F, PENG S G, et al Sampled-data consensus of multiagent systems under distributed event-triggered impulsive control with an innovative optimization strategy: reasonable sampling and control instants are selected. IEEE Systems, Man, and Cybernetics Magazine, 2025, 11 (4): 39- 55.
doi: 10.1109/MSMC.2025.3576450 |
| 13 |
ZHANG H Y, HUANG Y, ZHAO N, et al Improved event-triggered adaptive neural network control for multi-agent systems under denial-of-service attacks. Artificial Intelligence Science and Engineering, 2025, 1 (2): 122- 133.
doi: 10.23919/aise.2025.000009 |
| 14 |
TANG Y, ZHANG D D, SHI P, et al Event-based formation control for nonlinear multiagent systems under DoS attacks. IEEE Trans. on Automatic Control, 2021, 66 (1): 452- 459.
doi: 10.1109/TAC.2020.2979936 |
| 15 |
BAO Y G, WEN G H, LV Y Z, et al Event-triggered path following of autonomous vehicles under false data injection attacks: a try-once-discard protocol-based transmission scheme. IEEE Systems, Man, and Cybernetics Magazine, 2024, 10 (4): 15- 24.
doi: 10.1109/MSMC.2024.3404359 |
| 16 |
NANDANWAR A, DHAR N, MALYSHEV D, et al Stochastic event-based super-twisting formation control for multiagent system under network uncertainties. IEEE Trans. on Control of Network Systems, 2022, 9 (2): 966- 978.
doi: 10.1109/TCNS.2021.3089142 |
| 17 |
LI B Q, ZHAO L H, WEN S P Periodic event-triggered consensus of stochastic multi-agent systems under switching topology. Artificial Intelligence Science and Engineering, 2025, 1 (2): 147- 156.
doi: 10.23919/AISE.2025.000011 |
| 18 |
WAN Y, SHI X L, ZHAO X A, et al Distributed secure consensus tracking of multiagent systems under hybrid cyberattacks: an event-triggered neuroadaptive approach. IEEE Systems, Man, and Cybernetics Magazine, 2024, 10 (4): 77- 91.
doi: 10.1109/MSMC.2024.3358065 |
| 19 |
SONG C, LIU L, XU S Y Circle formation control of mobile agents with limited interaction range. IEEE Trans. on Automatic Control, 2019, 64 (5): 2115- 2121.
doi: 10.1109/TAC.2018.2866985 |
| 20 |
FANG X, ZHOU J L, WEN G H Location game of multiple unmanned surface vessels with quantized communications. IEEE Trans. on Circuits and Systems II: Express Briefs, 2022, 69 (3): 1322- 1326.
doi: 10.1109/tcsii.2021.3111733 |
| 21 |
DUAN P H, LV Y Z, WEN G H, et al A framework on fully distributed state estimation and cooperative stabilization of LTI plants. IEEE Trans. on Automatic Control, 2024, 69 (10): 6746- 6761.
doi: 10.1109/TAC.2024.3376791 |
| 22 | DUAN Z S, LV Y Z, DUAN P H, et al Integrated framework for cooperative mutual estimation and control in multi-agent systems. Acta Automatica Sinica, 2025, 51 (10): 2359- 2370. |
| 23 | LI Y, HUANG J Z, LV Y Z, et al Distributed state estimation for multi-agent systems under consensus control. Neural Information Processing, Lecture Notes in Computer Science, 2023, 14447, 214- 225. |
| 24 | LI Y, HUANG J Z, LV Y Z, et al Distributed entire state estimation and consensus control for Lipschitz nonlinear multi-agent systems. Proc. of the 3rd Conference on Fully Actuated System Theory and Applications, 2024, 443- 448. |
| 25 | HUANG J Z, LI Y, LV Y Z Integrated design of fully distributed adaptive state estimation and consensus control for multi-agent systems. Neural Information Processing, Lecture Notes in Computer Science, 2023, 14447, 226- 237. |
| 26 | HUANG J Z, LI Y, LV Y Z, et al Fully distributed adaptive state estimation and consensus control of multi-agent systems: a reduced-order observer-based approach. Proc. of the 3rd Conference on Fully Actuated System Theory and Applications, 2024, 432- 437. |
| 27 |
LV Y Z, WEN G H, HUANG T W, et al Adaptive attack-free protocol for consensus tracking with pure relative output information. Automatica, 2020, 117, 108998.
doi: 10.1016/j.automatica.2020.108998 |
| 28 |
LV Y Z, WEN G H, HUANG T W Adaptive protocol design for distributed tracking with relative output information: a distributed fixed-time observer approach. IEEE Trans. on Control of Network Systems, 2020, 7 (1): 118- 128.
doi: 10.1109/TCNS.2019.2919855 |
| 29 |
KAPILA V, SPARKS A, BUFFINGTON J, et al Spacecraft formation flying: dynamics and control. Journal of Guidance, Control, and Dynamics, 2000, 23 (3): 561- 564.
doi: 10.2514/2.4567 |
| 30 |
LIU W J, SUN J, WANG G, et al Data-driven resilient predictive control under denial-of-service. IEEE Trans. on Automatic Control, 2023, 68 (8): 4722- 4737.
doi: 10.1109/TAC.2022.3209399 |
| 31 |
LIU W J, SUN J, WANG G, et al Data-driven self-triggered control via trajectory prediction. IEEE Trans. on Automatic Control, 2023, 68 (11): 6951- 6958.
doi: 10.1109/TAC.2023.3244116 |
| 32 |
LI Y F, WANG X, SUN J, et al Self-triggered consensus control of multiagent systems from data. IEEE Trans. on Automatic Control, 2024, 69 (7): 4702- 4709.
doi: 10.1109/TAC.2024.3351865 |
| [1] | Yuanqing XIA, Zhongqi SUN, Li DAI, Yufeng ZHAN, Dihua ZHAI, Wenjun ZHAO, Fan PU. Differential flatness ADRC for high-speed steering of tracked tank systems [J]. Journal of Systems Engineering and Electronics, 2025, 36(6): 1665-1678. |
| [2] | Bin FENG, Weihua FAN, Yang GAO, Qingwei CHEN. Active disturbance rejection control based on cascade high-order extended state observer for systems with time-varying disturbances and measurement noise [J]. Journal of Systems Engineering and Electronics, 2025, 36(6): 1679-1691. |
| [3] | Zhidong ZHANG, Gongliu YANG, Qingzhong CAI, Jing FAN, Tao LI. Design and implementation of disturbance sliding mode observer for enhancing the dynamic control precision of inertial stabilization platform [J]. Journal of Systems Engineering and Electronics, 2025, 36(3): 791-802. |
| [4] | Jie LI, Yuanqing XIA. On stability analysis of nonlinear ADRC-based control system with application to inverted pendulum problems [J]. Journal of Systems Engineering and Electronics, 2024, 35(6): 1563-1573. |
| [5] | Jianping ZHOU, Wenjie ZHANG, Hang ZHOU, Qiang LI, Qunli XIA. Design of integral sliding mode guidance law based on disturbance observer [J]. Journal of Systems Engineering and Electronics, 2024, 35(1): 186-194. |
| [6] | Dongdong YAO, Xiaofang WANG, Hai LIN, Zhuping WANG. Leader trajectory planning method considering constraints of formation controller [J]. Journal of Systems Engineering and Electronics, 2023, 34(5): 1294-1308. |
| [7] | Yongshuai WANG, Zengqiang CHEN, Mingwei SUN, Qinglin SUN. Design and analysis of active disturbance rejection control for time-delay systems using frequency-sweeping [J]. Journal of Systems Engineering and Electronics, 2023, 34(2): 479-491. |
| [8] | Yang XU, Weiming ZHENG, Delin LUO, Haibin DUAN. Dynamic affine formation control of networked under-actuated quad-rotor UAVs with three-dimensional patterns [J]. Journal of Systems Engineering and Electronics, 2022, 33(6): 1269-1285. |
| [9] | Wanping SONG, Zengqiang CHEN, Mingwei SUN, Qinglin SUN. Reinforcement learning based parameter optimization of active disturbance rejection control for autonomous underwater vehicle [J]. Journal of Systems Engineering and Electronics, 2022, 33(1): 170-179. |
| [10] | Yue LI, Xianghua WEN, Wei LI, Lan WEI, Qunli XIA. Influence of roll-pitch seeker DRR and parasitic loop on Lyapunov stability of guidance system [J]. Journal of Systems Engineering and Electronics, 2021, 32(6): 1509-1526. |
| [11] | Juan Antonio VAZQUEZ TREJO, Adrien GUENARD, Manuel ADAM-MEDINA, Jean-Christophe PONSART, Laurent CIARLETTA, Damiano ROTONDO, Didier THEILLIOL. Event-triggered leader-following formation control for multi-agent systems under communication faults: application to a fleet of unmanned aerial vehicles [J]. Journal of Systems Engineering and Electronics, 2021, 32(5): 1014-1022. |
| [12] | Hui WAN, Xiaohui QI, Jie LI. Stability analysis of linear/nonlinear switching active disturbance rejection control based MIMO continuous systems [J]. Journal of Systems Engineering and Electronics, 2021, 32(4): 956-970. |
| [13] | Sheng LIU, He LIAO, Jinjin XIE, Yufei XU, Yi XU, Zhongxin TANG, Chuang YAO. A non-contact spacecraft architecture with extended stochastic state observer based control for gravity mission [J]. Journal of Systems Engineering and Electronics, 2021, 32(2): 460-472. |
| [14] | Zhen SHI, Yaen XIE, Chengchen DENG, Kun ZHAO, Yushan HE, Yong HAO. Disturbance observer based finite-time coordinated attitude tracking control for spacecraft on SO(3) [J]. Journal of Systems Engineering and Electronics, 2020, 31(6): 1274-1285. |
| [15] | Kada BELKACEM, Khalid MUNAWAR, Shafique Shaikh MUHAMMAD. Distributed cooperative control of autonomous multi-agent UAV systems using smooth control [J]. Journal of Systems Engineering and Electronics, 2020, 31(6): 1297-1307. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||