
Journal of Systems Engineering and Electronics ›› 2025, Vol. 36 ›› Issue (5): 1216-1234.doi: 10.23919/JSEE.2025.000024
• SYSTEMS ENGINEERING • Previous Articles
Wenrui DING1( ), Xiaorong ZHANG2,3(), Yufeng WANG1,*(), Qingyi LIU1(), Fuyuan MA2()
), Xiaorong ZHANG2,3(), Yufeng WANG1,*(), Qingyi LIU1(), Fuyuan MA2()
Received:2024-06-04
Online:2025-10-18
Published:2025-10-24
Contact:
Yufeng WANG
E-mail:ding@buaa.edu.cn;zhangxiaorong@buaa.edu.cn;wyfeng@buaa.edu.cn;liuqy671@buaa.edu.cn;fy_ma@buaa.edu.cn
About author:Supported by:Wenrui DING, Xiaorong ZHANG, Yufeng WANG, Qingyi LIU, Fuyuan MA. A review on fission-fusion behavior in unmanned aerial vehicle swarm systems[J]. Journal of Systems Engineering and Electronics, 2025, 36(5): 1216-1234.
Table 1
Homogeneous UAV swarm fission-fusion methods"
| Factor | Fission-fusion method | Disadvantage | Advantage | Applicable scenario | Representative literature |
| Leader/virtual leader | Individuals follow different real or virtual leaders to fission-fusion by broadcasting or interaction | High requirement for perception, planning, and interaction ability of a selected leader | Leaders can be generated through designation or simple election to generate leaders | Small-scale swarms with advanced control center | [ |
| Internal interaction force | Fission-fusion with internal rules and initial conditions | The global control parameter is needed to preset the forces in the known environment based on the control framework | Can be designed according to different scene requirements | Small-scale swarms with advanced control centers or any swarm without a center | [ |
| Task assignment or negotiation mechanism | Fission-fusion by setting different tasks or goals for different individuals through pre-storage or real-time | Centralized coordination or distributed communication negotiation between UAVs is required | Fission-fusion campaigns can be carried out directly according to task requirements | Small-scale swarms with advanced control center | [ |
| Interactive structure | Fission-fusion by controlling the interaction network between individual units in the swarm | The global network structure of the swarm is required to introduce centralized planning | Higher scene adaptability and control robustness | Global advanced control center for centralized planning and control | [ |
| Self- organized excitability | Self-organized fission-fusion in external stimulation based on self-control structure | Requiring a high level of perception ability for UAV individuals, and recognition mechanism is needed | Fission-fusion can be performed for different stimuli and can be done directly through behaviour of the stimulus | Requires specific stimulation from the external environment, without restrictions on swarm size | [ |
Table 2
Heterogeneous UAV swarm fission-fusion methods"
| Category | Factor | Fission-fusion method and effect | Disadvantage | Advantage | Applicable scenario | Representative literature |
| Controlled | Self-performance of UAVs | Implement task-level fission-fusion based on the heterogeneity of UAVs | Require obvious heterogeneity between UAVs, global control and singularity grouping | Direct fission-fusion based on physical differences is possible with less computational effort | Small-scale swarms with a significant difference | [ |
| Coordination mechanisms such as task assignment or negotiation | Fission-fusion by setting different tasks or goals for different individuals through pre-storage or real-time | Centralized coordination is required to achieve multi-level task presetting | Fast implementation of swarms fission-fusion planning in smaller tasks | Small-scale swarm with global or advanced control centers | [ | |
| Self-organized | Heuristic algorithm | Self-organized fission-fusion and control based on intelligent learning networks with partial experience | Partial pre-learning is required, and requires high perceptual and computational abilities for heterogeneous UAVs | High efficiency of fission-fusion swarms with ground arithmetic guarantees | High-performance UAV swarm with network pre-learning | [ |
| Control protocol and interaction structure | Self-organized fission-fusion by controlling the interaction topology between heterogeneous individuals and designing control protocols | The global network structure of the swarm is required to introduce centralized planning | Overall planning efficiency is higher in higher order controllers | Small-scale swarms with high-order controllers | [ |

Fig 1
Schematic diagram of the fixed-range interactive swarm motion"
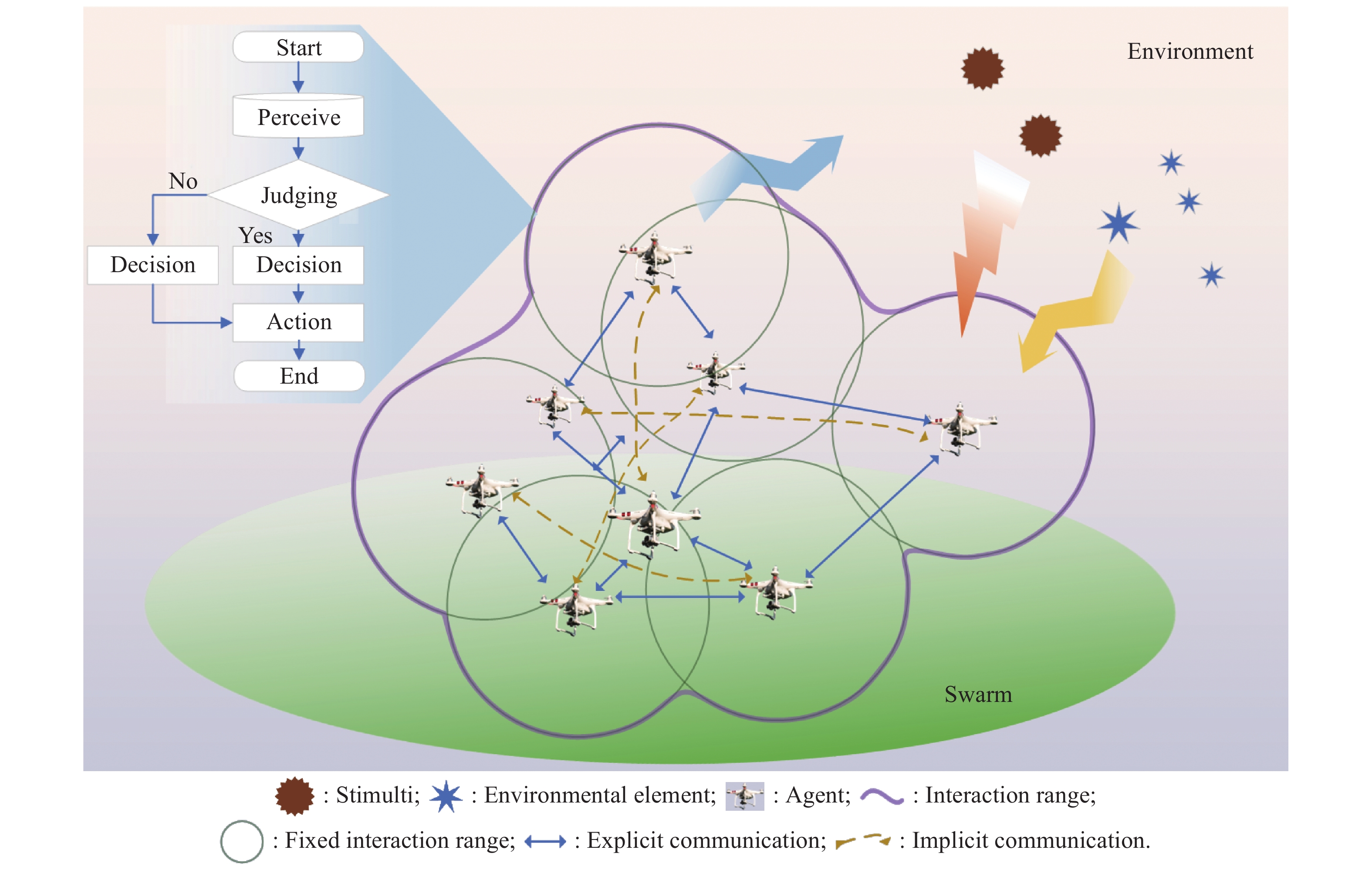

Fig 2
Schematic diagram of the topological information interaction mechanism"
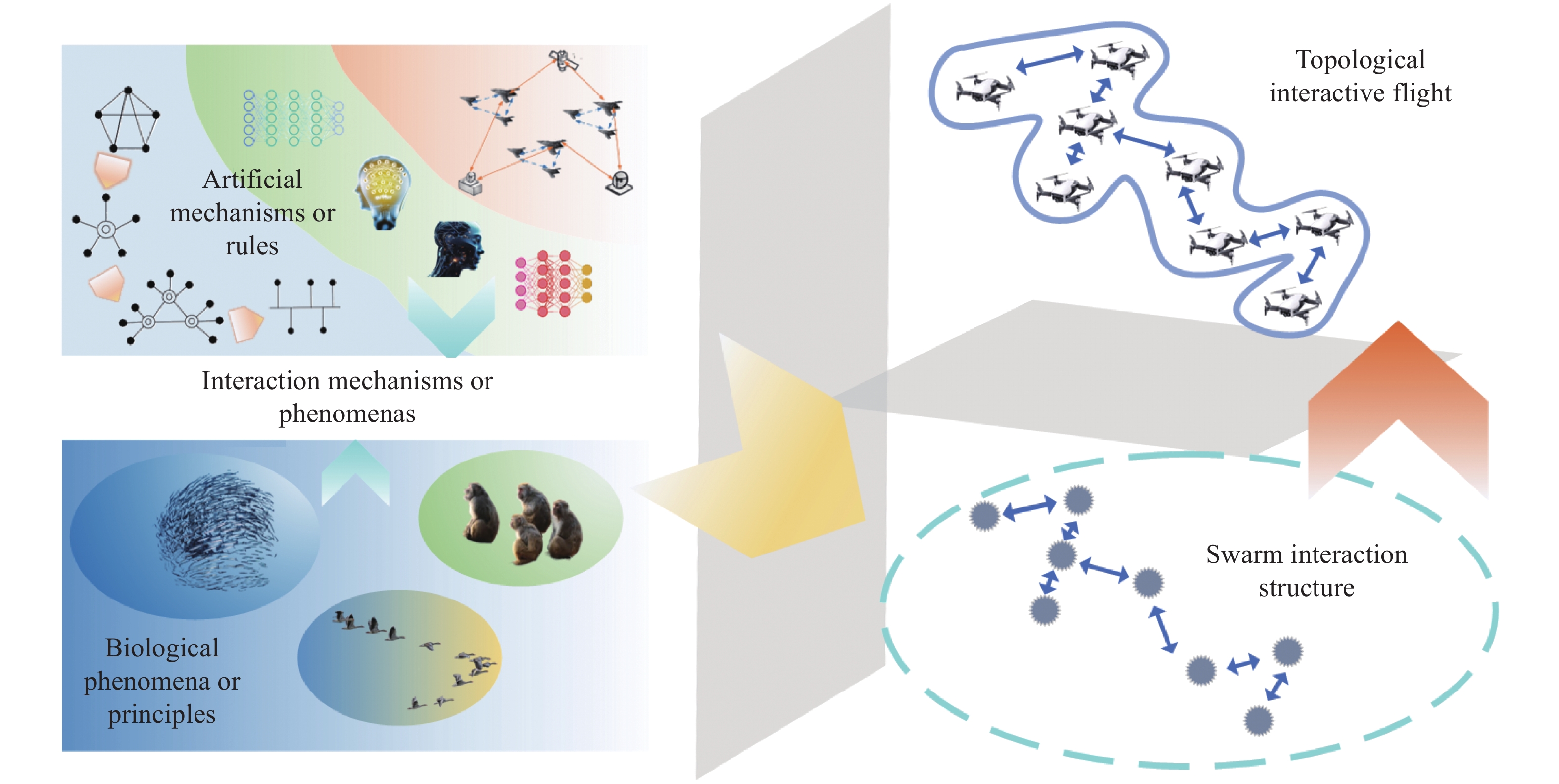

Fig 3
Fission-fusion of real and virtual leaders in UAV swarm"
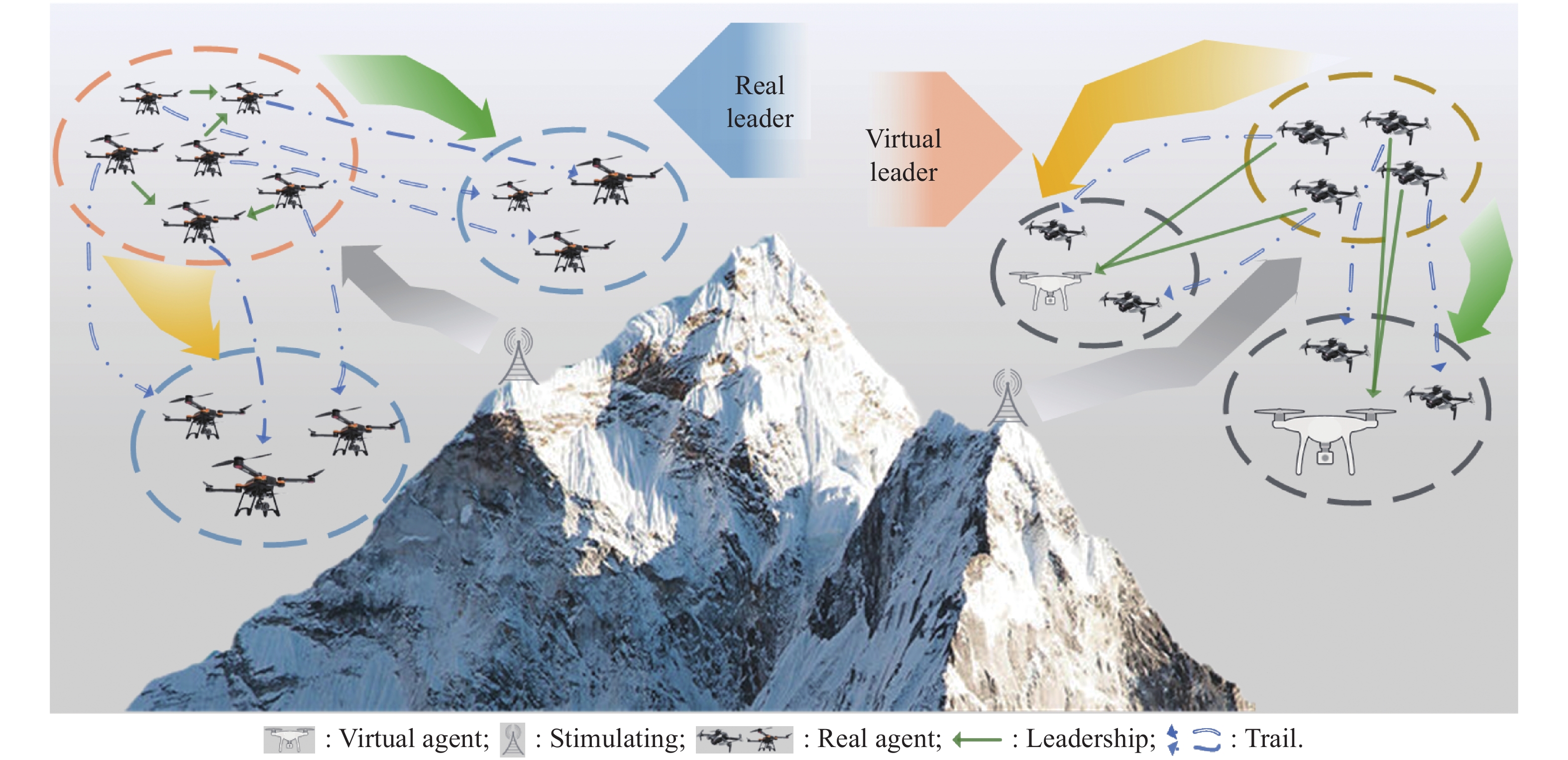

Fig 4
Fission-fusion movements from different ways of assigning or negotiating tasks"
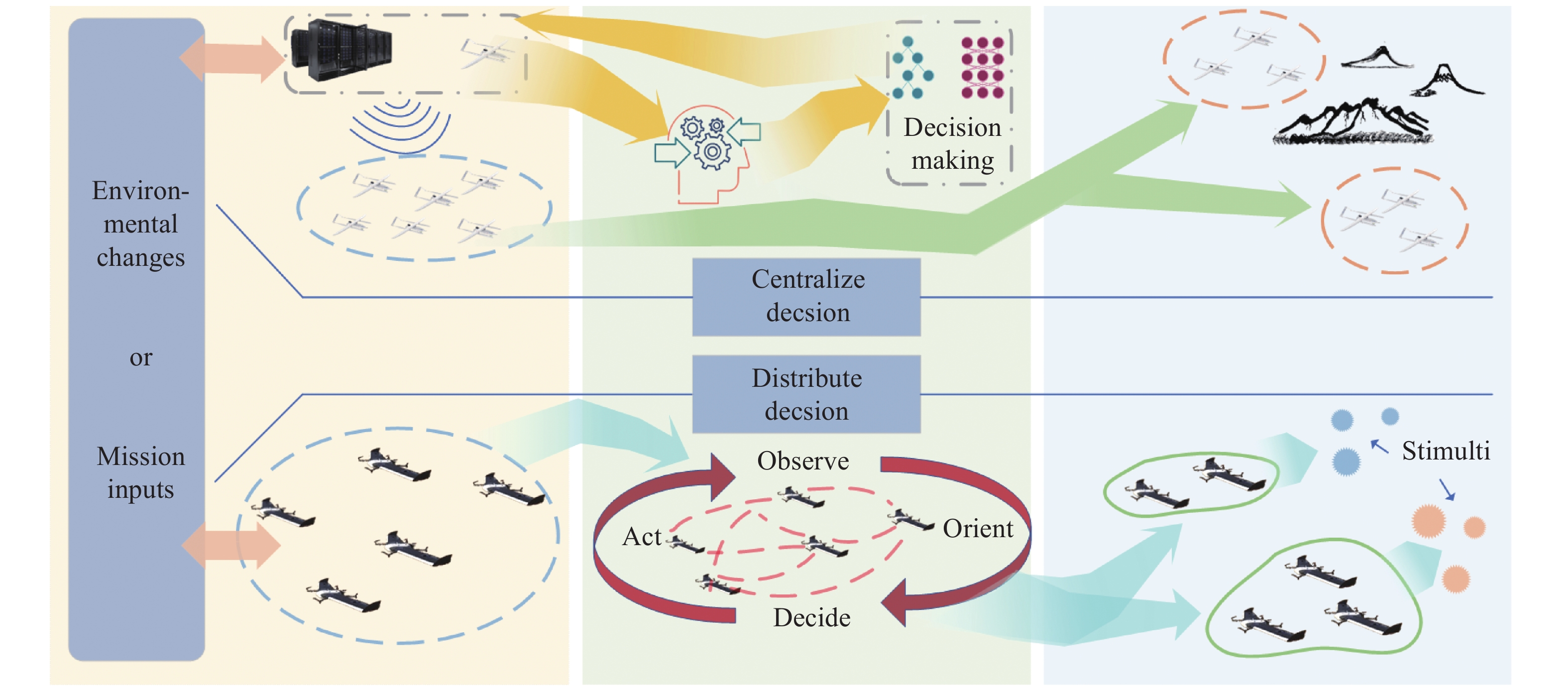

Fig 5
Fission-fusion behavior with artificial intelligence algorithms"

| 1 | SUMPTER D J. Collective animal behavior. Princeton: Princeton University Press, 2010. |
| 2 |
COUZIN I D Collective cognition in animal groups. Trends in Cognitive Sciences, 2009, 13 (1): 36- 43.
doi: 10.1016/j.tics.2008.10.002 |
| 3 |
OUELLETTE N T A physics perspective on collective animal behavior. Physical Biology, 2022, 19 (2): 021004.
doi: 10.1088/1478-3975/ac4bef |
| 4 |
GIARDINA I Collective behavior in animal groups: theoretical models and empirical studies. HFSP Journal, 2008, 2 (4): 205- 219.
doi: 10.2976/1.2961038 |
| 5 |
COUZIN I Collective minds. Nature, 2007, 445 (7129): 715.
doi: 10.1038/445715a |
| 6 | COUZIN I D, KRAUSE J Self-organization and collective behavior in vertebrates. Advances in the Study of Behavior, 2003, 32 (1): 1- 109. |
| 7 |
GOLDSTONE R L, GURECKIS T M Collective behavior. Topics in Cognitive Science, 2009, 1 (3): 412- 438.
doi: 10.1111/j.1756-8765.2009.01038.x |
| 8 |
COUZIN I D, LAIDRE M E Fission-fusion populations. Current Biology, 2009, 19 (15): 633- 635.
doi: 10.1016/j.cub.2009.05.034 |
| 9 |
SYMINGTON M M Fission-fusion social organization in Ateles and Pan. International Journal of Primatology, 1990, 11, 47- 61.
doi: 10.1007/BF02193695 |
| 10 | CAMAZINE S, DENEUBOURG J L, FRANKS N R, et al. Self-organization in biological systems. Princeton: Princeton University Press, 2020. |
| 11 |
DUTTA K How birds fly together: the dynamics of flocking. Resonance, 2010, 15 (12): 1097- 1110.
doi: 10.1007/s12045-010-0122-5 |
| 12 |
CROFT D, JAMES R, THOMAS P, et al Social structure and co-operative interactions in a wild population of guppies (Poecilia reticulata). Behavioral Ecology and Sociobiology, 2006, 59, 644- 650.
doi: 10.1007/s00265-005-0091-y |
| 13 |
SAIL P, BORKAR M R, SHAIKH I, et al Faunal diversity of an insular crepuscular cave of Goa, India. Journal of Threatened Taxa, 2021, 13 (2): 17630- 17638.
doi: 10.11609/jott.6628.13.2.17630-17638 |
| 14 |
LOY J Social behavior and habitat: primate societies. Science, 1971, 174 (4004): 49.
doi: 10.1126/science.174.4004.49 |
| 15 | SCHUSTERMAN R J, THOMAS J A, WOOD F G, et al. Dolphin cognition and behavior: a comparative approach. Brandon: Psychology Press, 2013. |
| 16 |
PERONY N, KERTH G, SCHWEITZER F Data-driven modelling of group formation in the fission-fusion dynamics of Bechstein’s bats. Journal of the Royal Society Interface, 2022, 19 (190): 20220170.
doi: 10.1098/rsif.2022.0170 |
| 17 |
BAJEC I L, HEPPNER F H Organized flight in birds. Animal Behaviour, 2009, 78 (4): 777- 789.
doi: 10.1016/j.anbehav.2009.07.007 |
| 18 |
LEVINE H, RAPPEL W J, COHEN I Self-organization in systems of self-propelled particles. Physical Review E, 2000, 63 (1): 017101.
doi: 10.1103/PhysRevE.63.017101 |
| 19 |
JAVED S, HASSAN A, AHMAD R, et al State-of-the-art and future research challenges in UAV swarms. IEEE Internet of Things Journal, 2024, 11 (11): 19023- 19045.
doi: 10.1109/JIOT.2024.3364230 |
| 20 |
JIN B H, SUN Y, WU W J, et al Deep reinforcement learning and ant colony optimization supporting multi-UGV path planning and task assignment in 3D environments. IET Intelligent Transport Systems, 2024, 18 (9): 1652- 1664.
doi: 10.1049/itr2.12535 |
| 21 |
YU H M, MA Y T A cooperative mission planning method considering environmental factors for UUV swarm to search multiple underwater targets. Ocean Engineering, 2024, 308, 118228.
doi: 10.1016/j.oceaneng.2024.118228 |
| 22 |
ILAYA O, BIL C, EVANS M Control design for unmanned aerial vehicle swarming. Proceedings of the Institution of Mechanical Engineers, Part G: Journal of Aerospace Engineering, 2008, 222 (4): 549- 567.
doi: 10.1243/09544100JAERO230 |
| 23 | CIMINO M G, LAZZERI A, VAGLINI G. Combining stigmergic and flocking behaviors to coordinate swarms of UAVs performing target search. Proc. of the 6th International Conference on Information, Intelligence, Systems and Applications, 2015: 1−6. |
| 24 | QIU H X, DUAN H B From collective flight in bird flocks to unmanned aerial vehicle autonomous swarm formation. Chinese Journal of Engineering, 2017, 39 (3): 317- 322. |
| 25 | PHAM T T, KRISHEN K, MARINE L. Using swarm intelligence to coordinate a fleet of UAVs in a search and rescue mission. Proc. of the International Symposium on Measurement and Control in Robotics, 2022: 1−8. |
| 26 |
LIANG H T, FU Y F, GAO J Bio-inspired self-organized cooperative control consensus for crowded UUV swarm based on adaptive dynamic inter-action topology. Applied Intelligence, 2021, 51, 4664- 4681.
doi: 10.1007/s10489-020-02104-5 |
| 27 |
LIU Y H, WEI C, DUAN H B, et al Active disturbance rejection heading control of USV based on parameter tuning via an improved pigeon-inspired optimization. Transactions of the Institute of Measurement and Control, 2025, 47 (2): 304- 315.
doi: 10.1177/01423312241239484 |
| 28 |
WANG C C, WU A, HOU Y Q, et al Optimal deployment of swarm positions in cooperative interception of multiple UAV swarms. Digital Communications and Networks, 2023, 9 (2): 567- 579.
doi: 10.1016/j.dcan.2022.04.002 |
| 29 |
ZHANG X R, DING W R, WANG Y F, et al Bio-inspired self-organized fission-fusion control algorithm for UAV swarm. Aerospace, 2022, 9 (11): 714.
doi: 10.3390/aerospace9110714 |
| 30 |
ZHANG J, ZHAO Y, TIAN B M, et al Accelerating consensus of self-driven swarm via adaptive speed. Physica A: Statistical Mechanics and its Applications, 2009, 388 (7): 1237- 1242.
doi: 10.1016/j.physa.2008.11.043 |
| 31 |
FU X W, PAN J, WANG H X, et al A formation maintenance and reconstruction method of UAV swarm based on distributed control. Aerospace Science and Technology, 2020, 104, 105981.
doi: 10.1016/j.ast.2020.105981 |
| 32 | RAMBABU R, BAHIKI M R, ALI S A M Relative position-based collision avoidance system for swarming UAVS using multi-sensor fusion. Applied Sciences, 2015, 10 (21): 10012- 10017. |
| 33 | INDRIYANTO T, RIZKI A, HARIYADIN M, et al Centralized swarming UAV using ROS for collaborative missions. Proc. of the AIP Conference Proceedings, 2020, 2226 (1): 030012. |
| 34 | WAHARTE S, TRIGONI N, JULIER S. Coordinated search with a swarm of UAVs. Proc. of the 6th IEEE Annual Communications Society Conference on Sensor, Mesh and Ad Hoc Communications and Networks Workshops, 2009: 1−3. |
| 35 | YEH S, CHAMBERLAND J F, HUFF G H. An investigation of geolocation-aware beamforming algorithms for swarming UAVs. Proc. of the IEEE International Symposium on Antennas and Propagation & USNC/URSI National Radio Science Meeting, 2017: 641−642. |
| 36 | LI T, LI C, YANG C G, et al A mean field game-theoretic cross-layer optimization for multi-hop swarm UAV communications. Journal of Communications and Networks, 2021, 24 (1): 68- 82. |
| 37 | LIU Q, HE M, XU D Q, et al A mechanism for recognizing and suppressing the emergent behavior of UAV swarm. Mathematical Problems in Engineering, 2018, 2018 (1): 6734923. |
| 38 |
ZHANG X R, WANG Y F, DING W R, et al Bio-inspired fission-fusion control and planning of unmanned aerial vehicles swarm systems via reinforcement learning. Applied Sciences, 2024, 14 (3): 1192.
doi: 10.3390/app14031192 |
| 39 | WANG Y F, ZHANG X R, WANG Q, et al. Reinforcement learning based fission-fusion for heterogeneous UAV swarm under dynamic interference environments. Proc. of the First Aerospace Frontiers Conference, 2024: 292−303. |
| 40 |
AlLI Z A, ALKHAMMASH E H, HASAN R State-of-the-art flocking strategies for the collective motion of multi-robots. Machines, 2024, 12 (10): 739.
doi: 10.3390/machines12100739 |
| 41 | MAGESH M, JAWAHAR P, SARANYA S. Spider monkey based metaheuristic tuning of PID controllers for stability landing of UAV’S with SMP-Auxetic landing gears. Proc. of the International Conference on Electrical, Electronics, Information and Communication Technologies, 2022: 1−6. |
| 42 | HU S B, HUA Y Z, DONG X W, et al. Distributed topology fault-tolerant time-varying formation control based on persistent topology optimization and reconfiguration. Proc. of the 37th Youth Academic Annual Conference of Chinese Association of Automation, 2022: 740−747. |
| 43 |
MCGUIRE K N, DE W C, TUYLS K, et al Minimal navigation solution for a swarm of tiny flying robots to explore an unknown environment. Science Robotics, 2019, 4 (35): eaaw9710.
doi: 10.1126/scirobotics.aaw9710 |
| 44 | ZHOU X, WEN X G, WANG Z P, et al. Swarm of micro flying robots in the wild. Science Robotics, 2022, 7(66). DOI: 10.1126/scirobotics.aaw9710. |
| 45 | CONDLIFFE J. A 100-UAV swarm, dropped from jets, plans its own moves. Cambridge: MIT Technology Review, 2017. |
| 46 | DUAN H B, HUO M Z, FAN Y M. From animal collective behaviors to swarm robotic cooperation. National Science Review, 2023, 10(5). DOI: https://doi.org/10.1093/nsr/nwad040. |
| 47 |
LUO X Y, LI S B, GUAN X P Flocking algorithm with multi-target tracking for multi-agent systems. Pattern Recognition Letters, 2010, 31 (9): 800- 805.
doi: 10.1016/j.patrec.2010.01.014 |
| 48 |
DEY S, XU H Intelligent distributed swarm control for large-scale multi-UAV systems: a hierarchical learning approach. Electronics, 2022, 12 (1): 89.
doi: 10.3390/electronics12010089 |
| 49 | CHEN Z F, CHU T G, ZHANG J L. Swarm splitting and multiple targets seeking in multi-agent dynamic systems. Proc. of the 49th IEEE Conference on Decision and Control, 2010: 4577−4582. |
| 50 |
CHEN W, MENG X, LIU J J, et al Countering large-scale UAV swarm attack by efficient splitting. IEEE Trans. on Vehicular Technology, 2022, 71 (9): 9967- 9979.
doi: 10.1109/TVT.2022.3178821 |
| 51 |
CHEN Z F, LIAO H M, CHU T G Clustering in multi-agent swarms via medium-range interaction. Europhysics Letters, 2011, 96 (4): 40015.
doi: 10.1209/0295-5075/96/40015 |
| 52 | ZHOU L Y, LENG S P, LIU Q, et al Intelligent UAV swarm cooperation for multiple targets tracking. IEEE Internet of Things Journal, 2021, 9 (1): 743- 754. |
| 53 | ARNOLD R, JABLONSKI J, ABRUZZO B, et al. Heterogeneous UAV multi-role swarming behaviors for search and rescue. Proc. of the IEEE Conference on Cognitive and Computational Aspects of Situation Management, 2020: 122−128 |
| 54 |
PENG Q, WU H S, LI N Modeling and solving the dynamic task allocation problem of heterogeneous UAV swarm in unknown environment. Complexity, 2022, 2022 (1): 9219805.
doi: 10.1155/2022/9219805 |
| 55 |
XING D J, ZHEN Z Y, GONG H J Offense-defense confrontation decision making for dynamic UAV swarm versus UAV swarm. Proceedings of the Institution of Mechanical Engineers, Part G: Journal of Aerospace Engineering, 2019, 233 (15): 5689- 5702.
doi: 10.1177/0954410019853982 |
| 56 | LUO L B, WANG X Y, MA J F, et al Grpavoid: multigroup collision-avoidance control and optimization for UAV swarm. IEEE Trans. on Cybernetics, 2021, 53 (3): 1776- 1789. |
| 57 | CUI K, LI M, FABIAN C, et al. Scalable task-driven robotic swarm control via collision avoidance and learning mean-field control. Proc. of the IEEE International Conference on Robotics and Automation, 2023: 1192−1199. |
| 58 |
YANG P P, LIU M Y, LEI X K, et al A novel control algorithm for the self-organized fission behavior of flocking system with time delay. International Journal of Control, Automation and Systems, 2016, 14 (4): 986- 997.
doi: 10.1007/s12555-014-0518-1 |
| 59 |
YANG P P, YAN M, SONG J, et al Self-organized fission-fusion control algorithm for flocking systems based on intermittent selective interaction. Complexity, 2019, 2019 (1): 2187812.
doi: 10.1155/2019/2187812 |
| 60 | SCHEUTZ M, SCHERMERHORN P, BAUER P. The utility of heterogeneous swarms of simple UAVs with limited sensory capacity in detection and tracking tasks. Proc. of the IEEE Swarm Intelligence Symposium, 2005: 257−264. |
| 61 |
ZHEN Z Y, WEN L D, WANG B L, et al Improved contract network protocol algorithm based cooperative target allocation of heterogeneous UAV swarm. Aerospace Science and Technology, 2021, 119, 107054.
doi: 10.1016/j.ast.2021.107054 |
| 62 | CHEN J, XIAO K, YOU K, et al Hierarchical task assignment strategy for heterogeneous multi-UAV system in large-scale search and rescue scenarios. International Journal of Aerospace Engineering, 2021, 2021 (1): 7353697. |
| 63 | BOUVRY P, CHAUMETTE S, DANOY G, et al. Using heterogeneous multilevel swarms of UAVs and high-level data fusion to support situation management in surveillance scenarios. Proc. of the IEEE International Conference on Multisensor Fusion and Integration for Intelligent Systems, 2016: 424−429. |
| 64 | GADE S, JOSHI A. Heterogeneous UAV swarm system for target search in adversarial environment. Proc. of the International Conference on Control Communication and Computing, 2013: 358−363. |
| 65 | KOUZEGHAR M, SONG Y, MEGHJANI M, et al. Multi-target pursuit by a decentralized heterogeneous UAV swarm using deep multi-agent reinforcement learning. Proc. of the IEEE International Conference on Robotics and Automation, 2023: 3289−3295. |
| 66 |
JIANG B, QIN K Y, LI T, et al Robust cooperative control of UAV swarms for dual-camp diver-gent tracking of a heterogeneous target. Drones, 2023, 7 (5): 306.
doi: 10.3390/drones7050306 |
| 67 |
HE W J, YAO H P, MAI T L, et al Three-stage stackelberg game enabled clustered federated learning in heterogeneous UAV swarms. IEEE Trans. on Vehicular Technology, 2023, 72 (7): 9366- 9380.
doi: 10.1109/TVT.2023.3246636 |
| 68 |
ZHEN Z Y, CHEN Y, WEN L D, et al An intelligent cooperative mission planning scheme of UAV swarm in uncertain dynamic environment. Aerospace Science and Technology, 2020, 100, 105826.
doi: 10.1016/j.ast.2020.105826 |
| 69 |
WU Y, LIANG T J, GOU J Z, et al Heterogeneous mission planning for multiple UAV formations via metaheuristic algorithms. IEEE Trans. on Aerospace and Electronic Systems, 2023, 59 (4): 3924- 3940.
doi: 10.1109/TAES.2023.3234455 |
| 70 | DANOY G, BRUST M R, BOUVRY P. Connectivity stability in autonomous multi-level UAV swarms for wide area monitoring. Proc. of the 5th ACM Symposium on Development and Analysis of Intelligent Vehicular Networks and Applications, 2015: 1−8. |
| 71 | ZHOU S Q, DONG X W, LI Q D, et al. Time-varying formation tracking control for UAV-UGV heterogeneous swarm systems with switching directed topologies. Proc. of the 16th IEEE International Conference on Control & Automation, 2020: 1068−1073. |
| 72 |
HUO M Z, DUAN H B, DING X L Manned aircraft and unmanned aerial vehicle heterogeneous formation flight control via heterogeneous pigeon flock consistency. Unmanned Systems, 2021, 9 (3): 227- 236.
doi: 10.1142/S2301385021410053 |
| 73 |
CHEN K, FAN C L, YANG Z W, et al Heterogeneous swarm control based on two-layer topology. International Journal of Robust and Nonlinear Control, 2023, 33 (11): 6329- 6353.
doi: 10.1002/rnc.6696 |
| 74 |
PUENTE-CASTRO A, RIVERO D, PAZOS A, et al A review of artificial intelligence applied to path planning in UAV swarms. Neural Computing and Applications, 2022, 34 (1): 153- 170.
doi: 10.1007/s00521-021-06569-4 |
| 75 |
BU Y J, YAN Y, YANG Y N Advancement challenges in UAV swarm formation control: a comprehensive review. Drones, 2024, 8 (7): 320.
doi: 10.3390/drones8070320 |
| 76 | LIQBA M M, ALI Z A, KHAN R, et al. Motion planning of UAV swarm: recent challenges and approaches. London: Aeronautics-New Advances, 2022. |
| 77 | LI T, SHIN H S, TSOURDOS A. Efficient decentralized task allocation for UAV swarms in multi-target surveillance missions. Proc. of the International Conference on Unmanned Aircraft Systems, 2019: 61−68. |
| 78 | KELLY K. Out of control: the rise of neo-biological civilization. Boston: Addison-Wesley Longman Publishing, 1994. |
| 79 |
ZHENG J B, CHEN R X, YANG T Y, et al An efficient strategy for accurate detection and localization of UAV swarms. IEEE Internet of Things Journal, 2021, 8 (20): 15372- 15381.
doi: 10.1109/JIOT.2021.3064376 |
| 80 |
MING R, JIANG R, LUO H B, et al Comparative analysis of different UAV swarm control methods on unmanned farms. Agronomy, 2023, 13 (10): 2499.
doi: 10.3390/agronomy13102499 |
| 81 |
STIRLING T, WISCHMANN S, FLOREANO D Energy-efficient indoor search by swarms of simulated flying robots without global information. Swarm Intelligence, 2010, 4, 117- 143.
doi: 10.1007/s11721-010-0039-3 |
| 82 | WANG N, LI Z, LIANG X L, et al Cooperative target search of UAV swarm with communication distance constraint. Mathematical Problems in Engineering, 2021, 2021 (1): 3794329. |
| 83 | XIA Z Y, DU J, WANG J J, et al Multi-agent reinforcement learning aided intelligent UAV swarm for target tracking. IEEE Trans. on Vehicular Technology, 2021, 71 (1): 931- 945. |
| 84 |
STOLFI D H, DANOY G An evolutionary algorithm to optimise a distributed UAV swarm formation system. Applied Sciences, 2022, 12 (20): 10218.
doi: 10.3390/app122010218 |
| 85 | AZAM M A, DEY S, MITTELMANN H D, et al. Decentralized UAV swarm control for multitarget tracking using approximate dynamic programming. Proc. of the IEEE World AI IoT Congress, 2021: 457−461. |
| 86 | DAVIS D T, CHUNG T H, CLEMENT M R, et al. Multi-swarm infrastructure for swarm versus swarm experimentation. Proc. of the 13th International Symposium on Distributed Autonomous Robotic Systems, 2018: 649−663. |
| 87 |
YAO K L, WANG J L, XU Y H, et al Self-organizing slot access for neighboring cooperation in UAV swarms. IEEE Trans. on Wireless Communications, 2020, 19 (4): 2800- 2812.
doi: 10.1109/TWC.2020.2968423 |
| 88 |
CHENG H Y, PAGE J, OLSEN J Cooperative control of UAV swarm via information measures. International Journal of Intelligent Unmanned Systems, 2013, 1 (3): 256- 275.
doi: 10.1108/IJIUS-01-2013-0001 |
| 89 | TEACY W L, NIE J, MCCLEAN S, et al. Maintaining connectivity in UAV swarm sensing. Proc. of the IEEE Globecom Workshops, 2010: 1771−1776. |
| 90 | ZHU B T, DENG Y M Distributed UAV swarm control framework with limited interaction for obstacle avoidance. Aircraft Engineering and Aerospace Technology, 2022, 95 (5): 697- 705. |
| 91 |
INNOCENTE M S, GRASSO P Self-organising swarms of firefighting UAVs: harnessing the power of collective intelligence in decentralised multi-robot systems. Journal of Computational Science, 2019, 34, 80- 101.
doi: 10.1016/j.jocs.2019.04.009 |
| 92 |
WU Y, GOU J Z, JI H L, et al Hierarchical mission replanning for multiple UAV formations performing tasks in dynamic situation. Computer Communications, 2023, 200, 132- 148.
doi: 10.1016/j.comcom.2023.01.011 |
| 93 | QAMAR S, KHAN S H, ARSHAD M A, et al. Autonomous UAV swarm navigation and multi-target tracking in 3D environments with dynamic obstacles. DOI: 10.48550/arXiv.2202.06253. |
| 94 | LING H, MCLVOR G E, VAN D A K, et al Costs and benefits of social relationships in the collective motion of bird flocks. Nature Ecology & Evolution, 2019, 3 (6): 943- 948. |
| 95 |
LING H, MCLVOR G E, VAN D A K, et al Local interactions and their group-level consequences in flocking jackdaws. Proceedings of the Royal Society B, 2019, 286 (1906): 20190865.
doi: 10.1098/rspb.2019.0865 |
| 96 |
BALLERINI M, CABIBBO N, CANDELIER R, et al Interaction ruling animal collective behavior depends on topological rather than metric distance: evidence from a field study. Proceedings of the National Academy of Sciences, 2008, 105 (4): 1232- 1237.
doi: 10.1073/pnas.0711437105 |
| 97 |
GARCIA G A, KESHMIRI S S Biologically inspired trajectory generation for swarming UAVs using topological distances. Aerospace Science and Technology, 2016, 54, 312- 319.
doi: 10.1016/j.ast.2016.04.028 |
| 98 |
ZHANG S A, LEI X K, ZHENG Z C, et al Collective fission behavior in swarming systems with density-based interaction. Physica A: Statistical Mechanics and its Applications, 2022, 603, 127723.
doi: 10.1016/j.physa.2022.127723 |
| 99 |
SHEN Y K, DENG Y M Pigeon-inspired optimisation algorithm with hierarchical topology and receding horizon control for multi-UAV formation. International Journal of Bio-Inspired Computation, 2021, 18 (4): 239- 249.
doi: 10.1504/IJBIC.2021.119949 |
| 100 |
QIU H X, DUAN H B Pigeon interaction mode switch-based UAV distributed flocking control under obstacle environments. ISA Transactions, 2017, 71, 93- 102.
doi: 10.1016/j.isatra.2017.06.016 |
| 101 |
XIE Y X, HAN L, DONG X W, et al Bio-inspired adaptive formation tracking control for swarm systems with application to UAV swarm systems. Neurocomputing, 2021, 453, 272- 285.
doi: 10.1016/j.neucom.2021.05.015 |
| 102 |
SONG Y H, DING G R, SUN J C, et al Topology tracking of dynamic UAV wireless networks. Chinese Journal of Aeronautics, 2022, 35 (11): 322- 335.
doi: 10.1016/j.cja.2021.08.012 |
| 103 | ZHANG L, DUAN H B, YONG T, et al Unmanned aerial vehicle swarm formation control based on paired interaction mechanism in jackdaws. Journal of Beijing University of Aeronautics and Astronautics, 2021, 47 (2): 391- 397. |
| 104 | YAO K L, WANG J L, ZHANG Y M, et al. A self-organized approach for neighboring message interaction in UAV swarms. Proc. of the IEEE International Conference on Communicationss, 2019: 1−6. |
| 105 | WU J, LUO C B, LUO Y, et al Distributed UAV swarm formation and collision avoidance strategies over fixed and switching topologies. IEEE Trans. on Cybernetics, 2021, 52 (10): 10969- 10979. |
| 106 | HAI X S, QIU H X, WEN C Y, et al. A novel distributed situation awareness consensus approach for UAV swarm systems. IEEE Trans. on Intelligent Transportation Systems, 2023, 24(12): 14706−14717. |
| 107 | FERNANDO M, SENANAYAKE R, AZAD A, et al. Graphical games for UAV swarm control under time-varying communication networks. https://doi.org/10.48550/arXiv.2205.02203. |
| 108 |
DONG X W, ZHOU Y, REN Z, et al Time-varying formation control for unmanned aerial vehicles with switching interaction topologies. Control Engineering Practice, 2016, 46, 26- 36.
doi: 10.1016/j.conengprac.2015.10.001 |
| 109 | DONG X W, LI Y F, LU C, et al Time-varying formation tracking for UAV swarm systems with switching directed topologies. IEEE Trans. on Neural networks and Learning Systems, 2018, 30 (12): 3674- 3685. |
| 110 | ZHU C C, LIANG X L, HE L L, et al. Demonstration and verification system for UAV formation control. Proc. of the IEEE International Conference on Control Science and Systems Engineering, 2017: 56−60. |
| 111 |
WANG N, DAI J Y, YING J UAV formation obstacle avoidance control algorithm based on improved artificial potential field and consensus. International Journal of Aeronautical and Space Sciences, 2021, 22 (6): 1413- 1427.
doi: 10.1007/s42405-021-00407-6 |
| 112 | BAI C C, YAN P, PIAO H Y, et al Learning-based multi-UAV flocking control with limited visual field and instinctive repulsion. IEEE Trans. on Cybernetics, 2023, 54 (1): 462- 475. |
| 113 | WU D, ARKHIPOV D I, KIM M, et al ADDSEN: Adaptive data processing and dissemination for UAV swarms in urban sensing. IEEE Trans. on Computers, 2016, 66 (2): 183- 198. |
| 114 | DU W B, YING W, YANG P, et al Network-based heterogeneous particle swarm optimization and its application in UAV communication coverage. IEEE Trans. on Emerging Topics in Computational Intelligence, 2019, 4 (3): 312- 323. |
| 115 | NIEL F, BATEMAN F. Dynamic average consensus based on group information for multi-swarm systems. Proc. of the 29th Mediterranean Conference on Control and Automation, 2021: 1222−1227. |
| 116 |
CHEN J X, WU Q H, XU Y H, et al A multi-leader multi-follower stackelberg game for coalition-based UAV MEC networks. IEEE Wireless Communications Letters, 2021, 10 (11): 2350- 2354.
doi: 10.1109/LWC.2021.3100113 |
| 117 | PENG X J, HE Y, SHEN J Time-varying formation tracking control of multi-leader multiagent systems with sampled-data. IEEE Trans. on Automation Science and Engineering, 2023, 21 (3): 3182- 3192. |
| 118 |
JIANG Y, BAI T T, WANG Y Formation control algorithm of multi-UAVs based on alliance. Drones, 2022, 6 (12): 431.
doi: 10.3390/drones6120431 |
| 119 | KARTAL Y, KORU A T, LEWIS F L, et al Adversarial multi-agent output containment graphical game with local and global objectives for UAVs. IEEE Trans. on Control of Network Systems, 2022, 10 (2): 875- 886. |
| 120 |
SHI L, CHENG Y H, SHAO J L, et al Collective behavior of multileader multiagent systems with random interactions over signed digraphs. IEEE Trans. on Control of Network Systems, 2021, 8 (3): 1394- 1405.
doi: 10.1109/TCNS.2021.3065650 |
| 121 | SORENSEN N, REN W. A unified formation control scheme with a single or multiple leaders. Proc. of the American Control Conference, 2007: 5412−5418. |
| 122 |
WEI X Q, YANG J Y, FAN X R Fully distributed guidance laws for unmanned aerial vehicles formation flight. Transactions of the Institute of Measurement and Control, 2020, 42 (5): 965- 980.
doi: 10.1177/0142331219880048 |
| 123 | ZHANG K, GAO X G. Distributed tracking of unmanned aerial vehicles with switching interactions. Proc. of the 8th International Conference on Intelligent Human-Machine Systems and Cybernetics, 2016: 46−49. |
| 124 |
XARGAY E, CHOE R, HOVAKIMYAN N, et al Multi-leader coordination algorithm for networks with switching topology and quantized information. Automatica, 2014, 50 (3): 841- 851.
doi: 10.1016/j.automatica.2014.02.004 |
| 125 | XARGAY E, CHOE R, HOVAKIMYAN N, et al. Convergence of a PI coordination protocol in net-works with switching topology and quantized measurements. Proc. of the 51st IEEE Conference on Decision and Control, 2012: 6107−6112. |
| 126 |
QIN B Y, ZHANG D, TANG S, et al Distributed grouping cooperative dynamic task assignment method of UAV swarm. Applied Sciences, 2022, 12 (6): 2865.
doi: 10.3390/app12062865 |
| 127 |
LU Y T, MA Y F, WANG J Y Multi-population parallel wolfpack algorithm for task assignment of UAV swarm. Applied Sciences, 2021, 11 (24): 11996.
doi: 10.3390/app112411996 |
| 128 | JIANG X W, ZHOU Q, YE Y. Method of task assignment for UAV based on particle swarm optimization in logistics. Proc. of the International Conference on Intelligent Systems, Metaheuristics & Swarm Intelligence, 2017: 113−117. |
| 129 |
LIU D X, WANG J L, XU K, et al Task-driven relay assignment in distributed UAV communication networks. IEEE Trans. on Vehicular Technology, 2019, 68 (11): 11003- 11017.
doi: 10.1109/TVT.2019.2942095 |
| 130 |
LIU B, WANG S L, LI Q H, et al Task assignment of UAV swarms based on deep reinforcement learning. Drones, 2023, 7 (5): 297.
doi: 10.3390/drones7050297 |
| 131 |
ZHANG J, XING J H Cooperative task assignment of multi-UAV system. Chinese Journal of Aeronautics, 2020, 33 (11): 2825- 2827.
doi: 10.1016/j.cja.2020.02.009 |
| 132 | BIGGS N. Algebraic graph theory. Berlin: Cambridge University Press, 1993. |
| 133 |
CHEN Z F, CHU T G Multi-agent system model with mixed coupling topologies for pattern formation and formation splitting. Mathematical and Computer Modelling of Dynamical Systems, 2013, 19 (4): 388- 400.
doi: 10.1080/13873954.2012.750614 |
| 134 | EREN T, ANDERSON B D O, MORSE A S, et al. Information structures to control formation splitting and merging. Proc. of the American Control Conference, 2004: 4951−4956. |
| 135 | PARRISH J Complexity, pattern, and evolutionary trade-off in animal aggregation. Science, 1999, 284 (99): 101. |
| 136 | LEE G, CHONG N Y. Flocking controls for swarms of mobile robots inspired by fish schools. Recent Advances in Multi Robot Systems, 2008: 53. |
| 137 | LIU M Y, YANG P P, LEI X K, et al Self-organized fission control for flocking system. Journal of Robotics, 2015, 2015 (1): 321781. |
| 138 | HA S Y, KO D G, ZHANG Y G, et al Emergent dynamics in the interactions of cucker-smale ensembles. Kinetic & Related Models, 2017, 10 (3): 689. |
| 139 | QI J L, ZHANG Z, DONG X W, et al. Time-varying formation tracking with distributed multi-sensor multi-target filtering. Proc. of the International Conference on Unmanned Aircraft Systems, 2023: 448−454. |
| 140 | YU J L, DONG X W, LI Q D, et al Fully adaptive practical time-varying output formation tracking for high-order nonlinear stochastic multiagent system with multiple leaders. IEEE Trans. on Cybernetics, 2019, 51 (4): 2265- 2277. |
| 141 |
TIAN L, HUA Y Z, DONG X W, et al Distributed time-varying group formation tracking for multiagent systems with switching interaction topologies via adaptive control protocols. IEEE Trans. on Industrial Informatics, 2022, 18 (12): 8422- 8433.
doi: 10.1109/TII.2022.3149912 |
| 142 | CHEN Z M, JIANG W K, LIU H Y. Research of UAV cluster motion based on swarm and artificial potential field fusion algorithm. Proc. of the International Conference on Guidance, Navigation and Control, 2022: 1896−1906. |
| 143 | OURARI R, CUI K, ELSHAMANHORY A, et al. Nearest-neighbor-based collision avoidance for quadrotors via reinforcement learning. Proc. of the International Conference on Robotics and Automation, 2022: 293−300. |
| 144 |
LIANG C Q, LIU L, LIU C Multi-UAV autonomous collision avoidance based on PPO-GIC algorithm with CNN-LSTM fusion network. Neural Networks, 2023, 162, 21- 33.
doi: 10.1016/j.neunet.2023.02.027 |
| [1] | Jun CHEN, Xiang SUN, Zhe XUE, Xinyu ZHANG. Target intention prediction of air combat based on Mog-GRU-D network under incomplete information [J]. Journal of Systems Engineering and Electronics, 2025, 36(4): 972-984. |
| [2] | Linmeng WANG, Yuhui WANG, Mou CHEN, Shulin DING. Multi-round dynamic game decision-making of UAVs based on decision tree [J]. Journal of Systems Engineering and Electronics, 2025, 36(4): 1006-1016. |
| [3] | Xunhua DAI, Jinhu TU, Quan QUAN. RflySim ToolChain: a rapid development and validation toolchain for intelligent unmanned swarm systems [J]. Journal of Systems Engineering and Electronics, 2025, 36(4): 1077-1093. |
| [4] | Jingfeng GUO, Rui SONG, Shiwei HE. Aerial-ground collaborative delivery route planning with UAV energy function and multi-delivery [J]. Journal of Systems Engineering and Electronics, 2025, 36(2): 446-461. |
| [5] | Yuelong LUO, Xiuqiang JIANG, Suchuan ZHONG, Yuandong JI. Air-to-ground reconnaissance-attack task allocation for heterogeneous UAV swarm [J]. Journal of Systems Engineering and Electronics, 2025, 36(1): 155-175. |
| [6] | Jingfeng GUO, Rui SONG, Shiwei HE. Vehicle and onboard UAV collaborative delivery route planning: considering energy function with wind and payload [J]. Journal of Systems Engineering and Electronics, 2025, 36(1): 194-208. |
| [7] | Guang ZHAN, Kun ZHANG, Ke LI, Haiyin PIAO. UAV maneuvering decision-making algorithm based on deep reinforcement learning under the guidance of expert experience [J]. Journal of Systems Engineering and Electronics, 2024, 35(3): 644-665. |
| [8] | Jiandong ZHANG, Yukun GUO, Lihui ZHENG, Qiming YANG, Guoqing SHI, Yong WU. Real-time UAV path planning based on LSTM network [J]. Journal of Systems Engineering and Electronics, 2024, 35(2): 374-385. |
| [9] | Boyu QIN, Dong ZHANG, Shuo TANG, Yang XU. Two-layer formation-containment fault-tolerant control of fixed-wing UAV swarm for dynamic target tracking [J]. Journal of Systems Engineering and Electronics, 2023, 34(6): 1375-1396. |
| [10] | Jianhong WANG, RAMIREZ-MENDOZA Ricardo A., Yang XU. Nonlinear direct data-driven control for UAV formation flight system [J]. Journal of Systems Engineering and Electronics, 2023, 34(6): 1409-1418. |
| [11] | Zhiwen XIAO, Xiaowei FU. A cooperative detection game: UAV swarm vs. one fast intruder [J]. Journal of Systems Engineering and Electronics, 2023, 34(6): 1565-1575. |
| [12] | Jie LI, Xiaoyu DANG, Sai LI. DQN-based decentralized multi-agent JSAP resource allocation for UAV swarm communication [J]. Journal of Systems Engineering and Electronics, 2023, 34(2): 289-298. |
| [13] | Yaozhong ZHANG, Yike LI, Zhuoran WU, Jialin XU. Deep reinforcement learning for UAV swarm rendezvous behavior [J]. Journal of Systems Engineering and Electronics, 2023, 34(2): 360-373. |
| [14] | Xing LEI, Xiaoxuan HU, Guoqiang WANG, He LUO. A multi-UAV deployment method for border patrolling based on Stackelberg game [J]. Journal of Systems Engineering and Electronics, 2023, 34(1): 99-116. |
| [15] | Hao LI, Hemin SUN, Ronghua ZHOU, Huainian ZHANG. Hybrid TDOA/FDOA and track optimization of UAV swarm based on A-optimality [J]. Journal of Systems Engineering and Electronics, 2023, 34(1): 149-159. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||