
Journal of Systems Engineering and Electronics ›› 2026, Vol. 37 ›› Issue (3): 964-973.doi: 10.23919/JSEE.2026.000119
• SYSTEMS ENGINEERING • Previous Articles Next Articles
Wangying XU( ), Naiming XIE()
), Naiming XIE()
Received:2024-04-12
Online:2026-06-18
Published:2026-06-29
Contact:
Naiming XIE
E-mail:xwy0227@nuaa.edu.cn;xienaiming@nuaa.edu.cn
Supported by:Wangying XU, Naiming XIE. Multi-stage forest UAV route design based on multi-strategy GA[J]. Journal of Systems Engineering and Electronics, 2026, 37(3): 964-973.
Add to citation manager EndNote|Reference Manager|ProCite|BibTeX|RefWorks
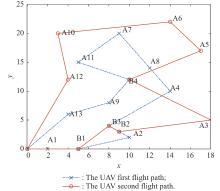
Fig 1
Schematic diagram of UAV patrol scattering points"
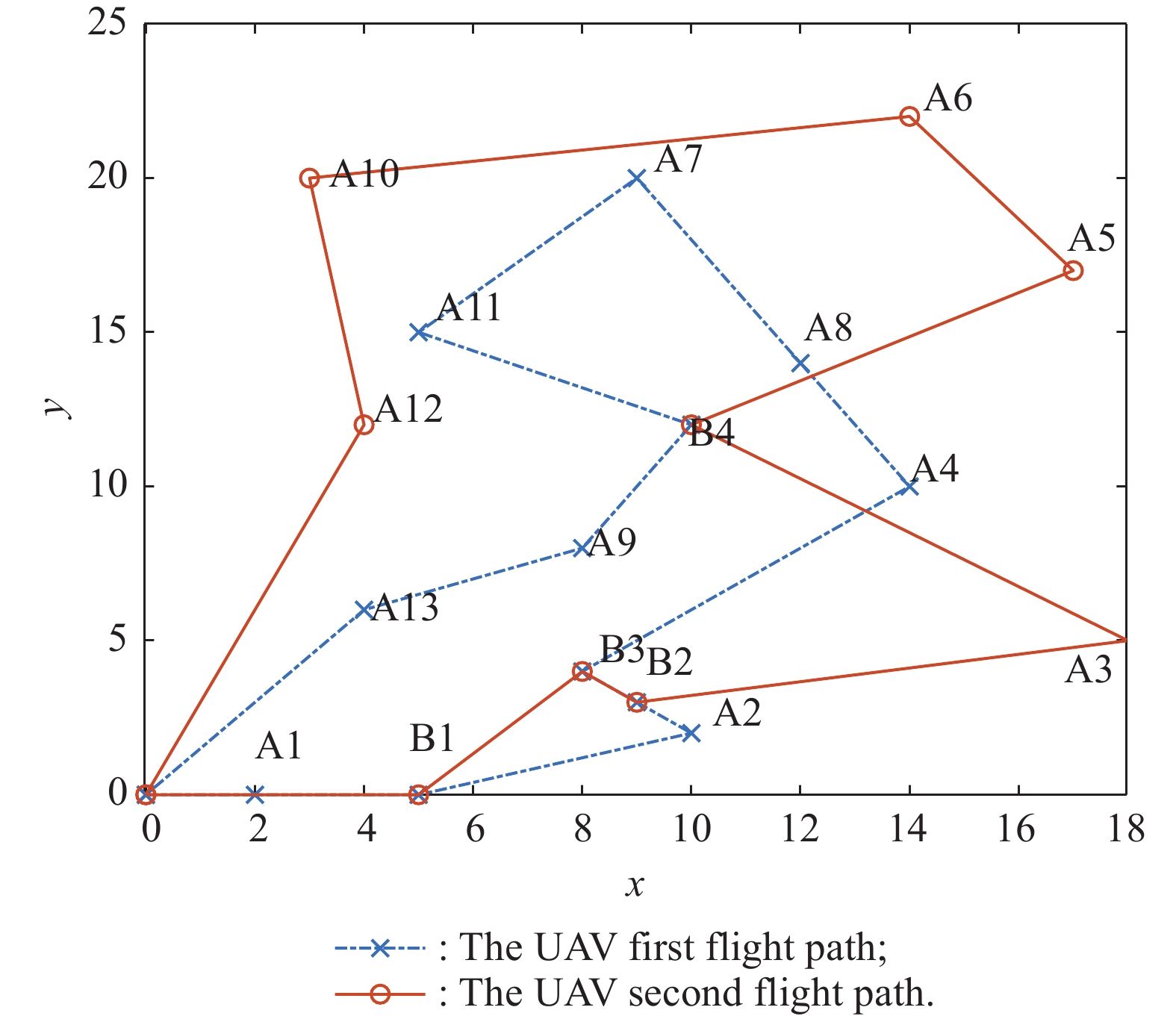
Table 1
Randomized categorization of single UAV multi-stage inspections"
| Inspection point | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 |
| Encoding | 1 | 1 | 0 | 0 | 1 | 1 | 1 | 0 | 1 | 1 | 0 | 1 | 0 |
Table 2
Parameter description"
| Parameter | Description |
| The | |
| The | |
| Number of | |
| Number of | |
| Binary vectors for flight groups | |
| Number of high-level inspections | |
| Number of low-level inspections | |
| The distance between | |
| The distance between | |
| 1, the UAV passes through round of inspection; 0, else | |
| 1, the UAV passes through round of inspection; 0, else |
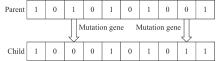
Fig 2
Process of mutation of chromosomal gene segments"
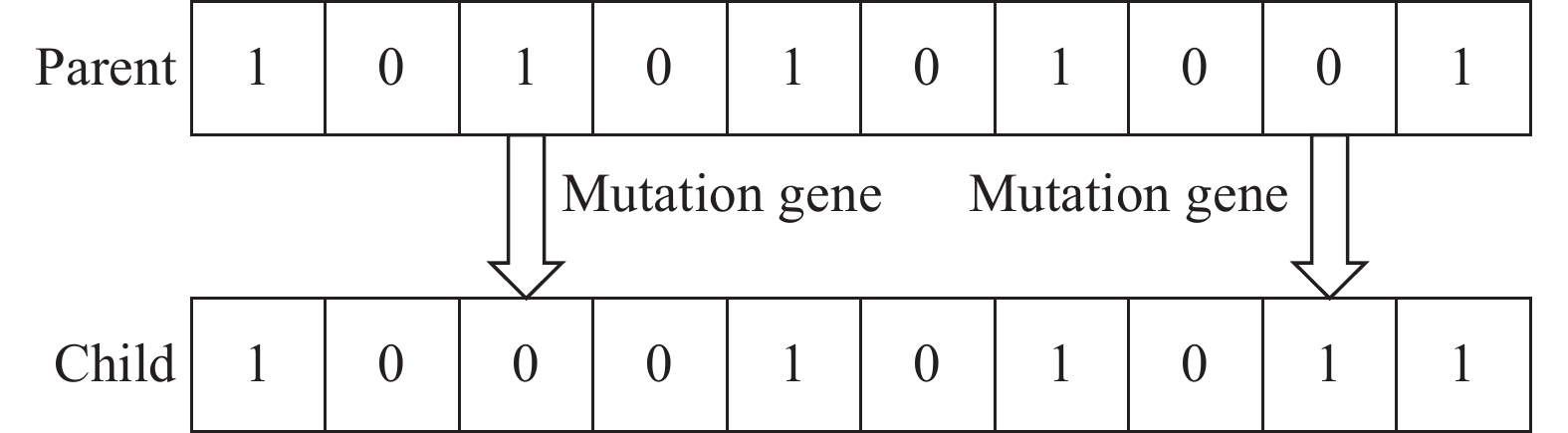

Fig 3
Schematic diagram of cross-strategy 1"


Fig 4
Schematic diagram of cross-strategy 2"
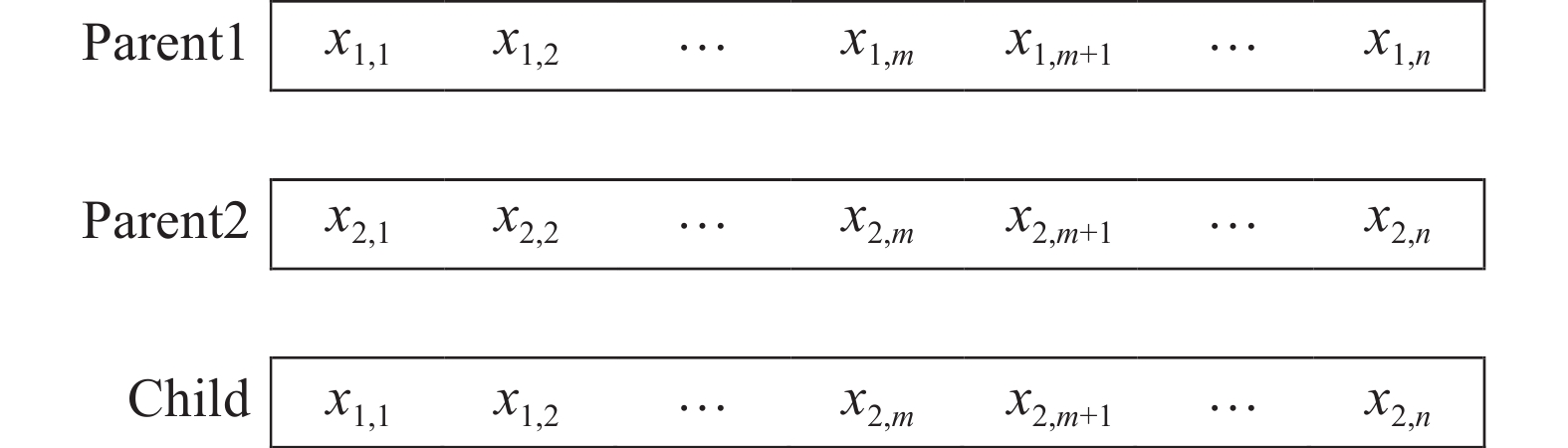

Fig 5
Schematic diagram of cross-strategy 3"
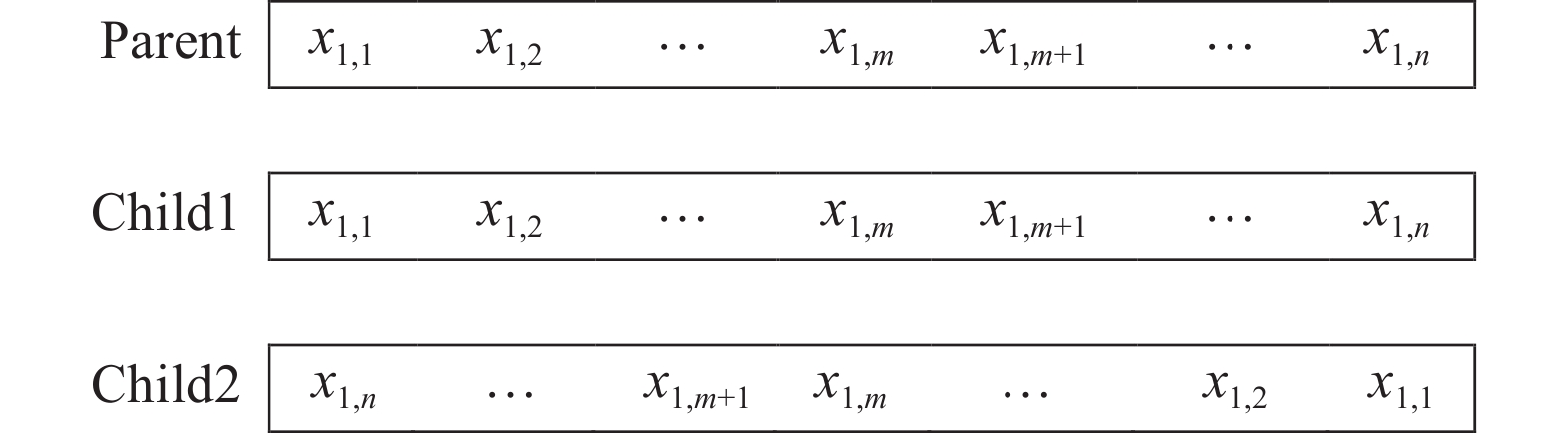
Fig 6
Two-stage forest scouting trajectory planning method for a single UAV"
Table 3
Parameters of the experiments"
| Experiment | Number of high-level inspection points | Number of low-level inspection points | Inspection space |
| Case 1 | 4 | 13 | 10 km×10 km |
| Case 2 | 6 | 30 | 50 km×50 km |
| Case 3 | 10 | 50 | 50 km×50 km |
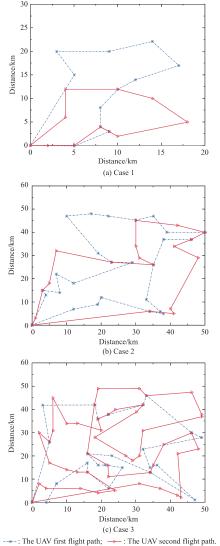
Fig 7
Routes for scheduling multi-stage forest inspections"
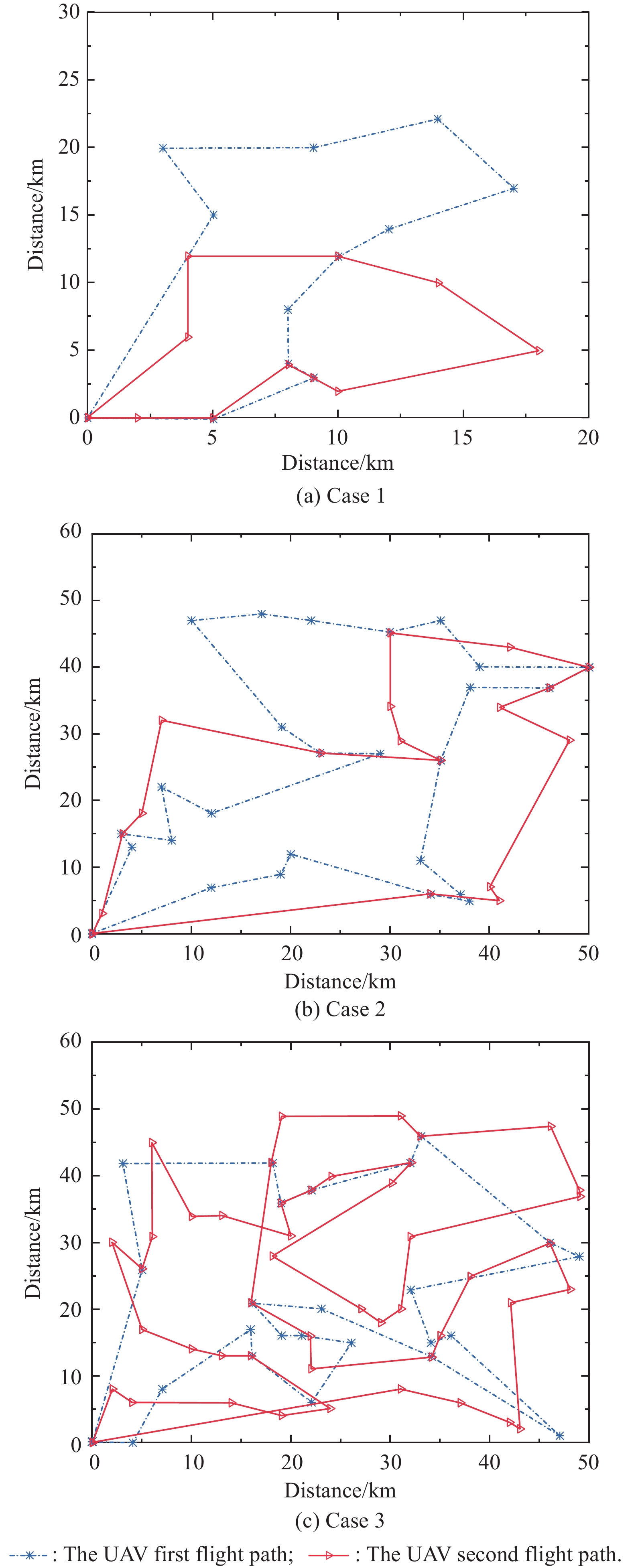
Table 4
Comparison of the flight distances calculated by different algorithms km"
| Experiment | Algorithm | First flight distance | Second flight distance | Total distance |
| Case 1 | Traditional GA | |||
| MSGA | ||||
| Case 2 | Traditional GA | |||
| MSGA | ||||
| Case 3 | Traditional GA | |||
| MSGA |
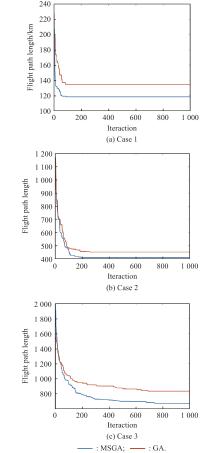
Fig 8
Iteration of the flight distance"
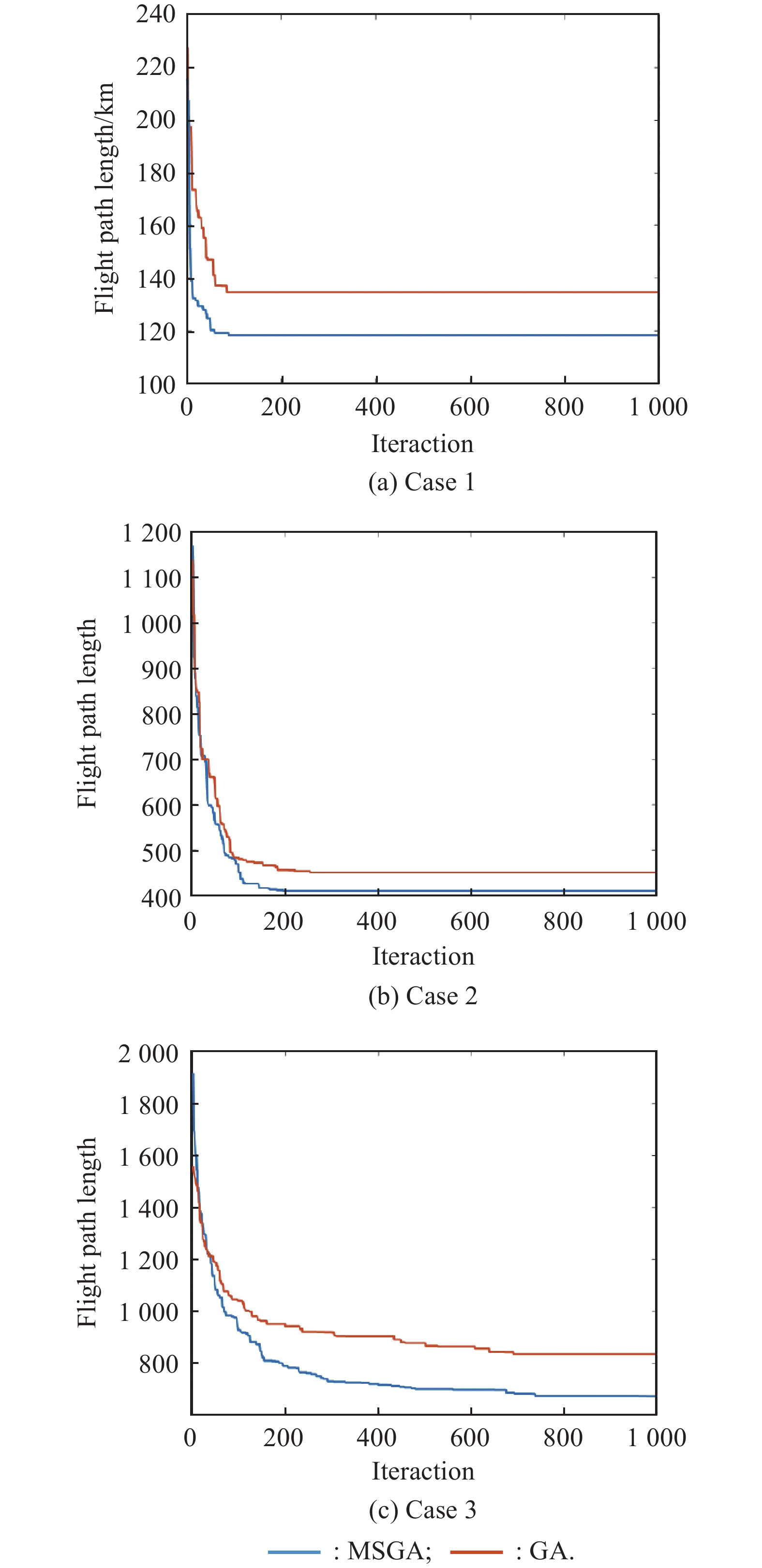
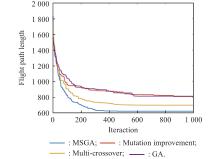
Fig 9
Comparison of 60-dimensional MSGA algorithm sensitivity analysis iterations"
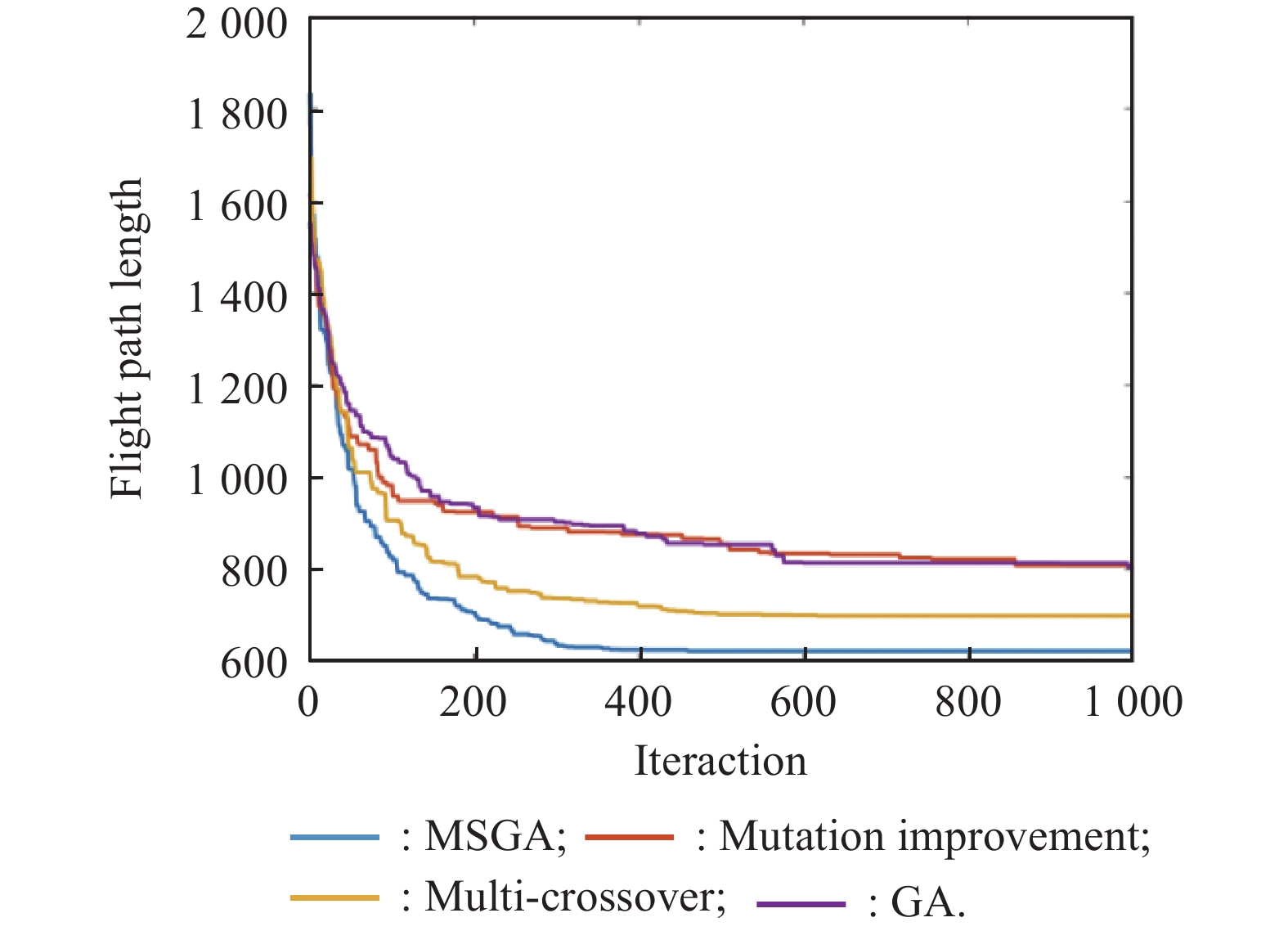
Table 5
Comparison of sensitivity analysis of the distance km"
| Algorithm | First flight distance | Second flight distance | Total distance |
| Traditional GA | |||
| Mutation improvement | |||
| Multi-crossover | |||
| MSGA |

Fig 10
Flight schematic of the four algorithms UAV path scheduling"
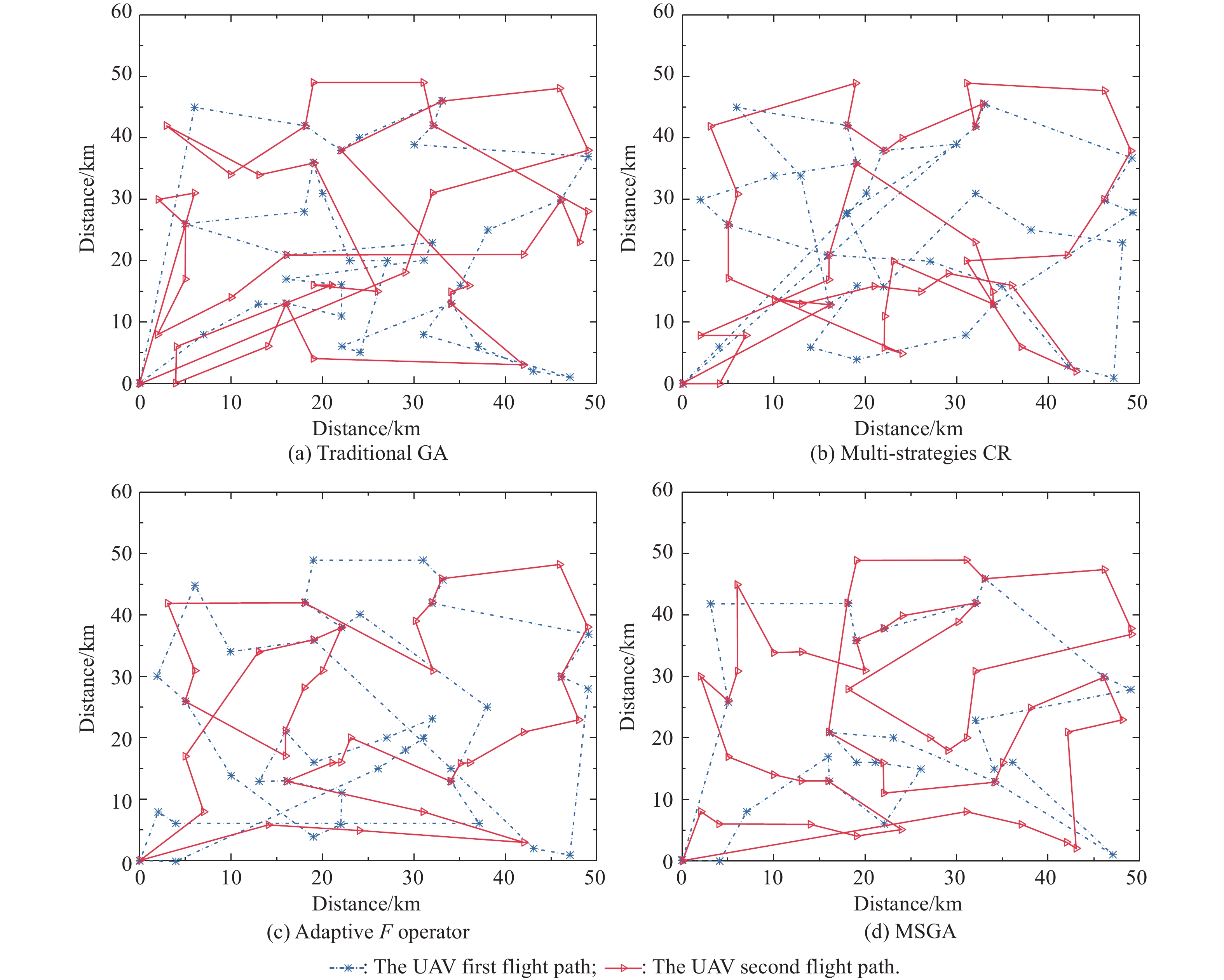
Fig 11
Comparison of the effect of the improvement strategy on the fitness value"
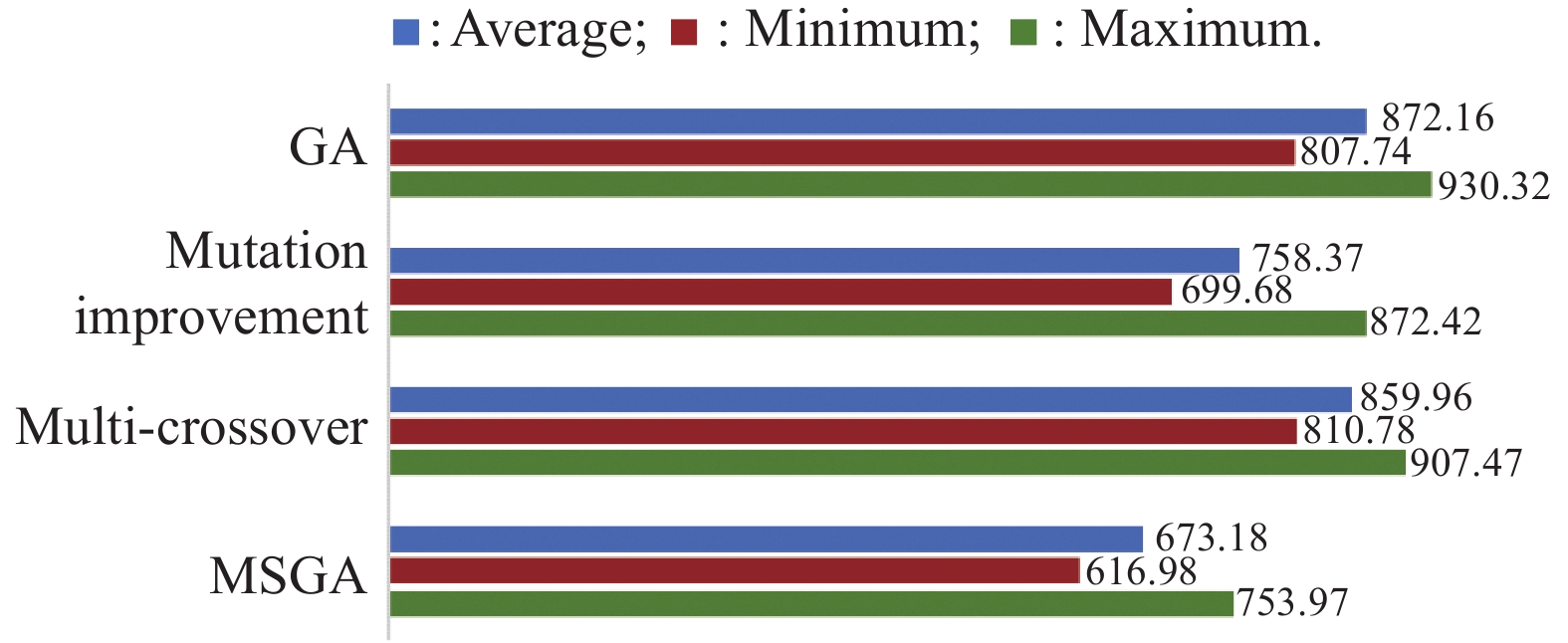
Table 6
Distance comparison of different algorithms km"
| Algorithm | First flight distance | Second flight distance | Total distance |
| P-ALNS | 292.53 | 458.10 | 750.63 |
| IGA | 295.64 | 404.92 | 700.56 |
| HGWODE | 316.65 | 447.08 | 763.73 |
| IMO-GA | 364.62 | 431.11 | 795.73 |
| GA | 346.82 | 480.92 | 827.74 |
| MSGA | 252.28 | 394.70 | 646.98 |
Fig 12
Iterations of different algorithms 60-dimensional multi-stage problem"
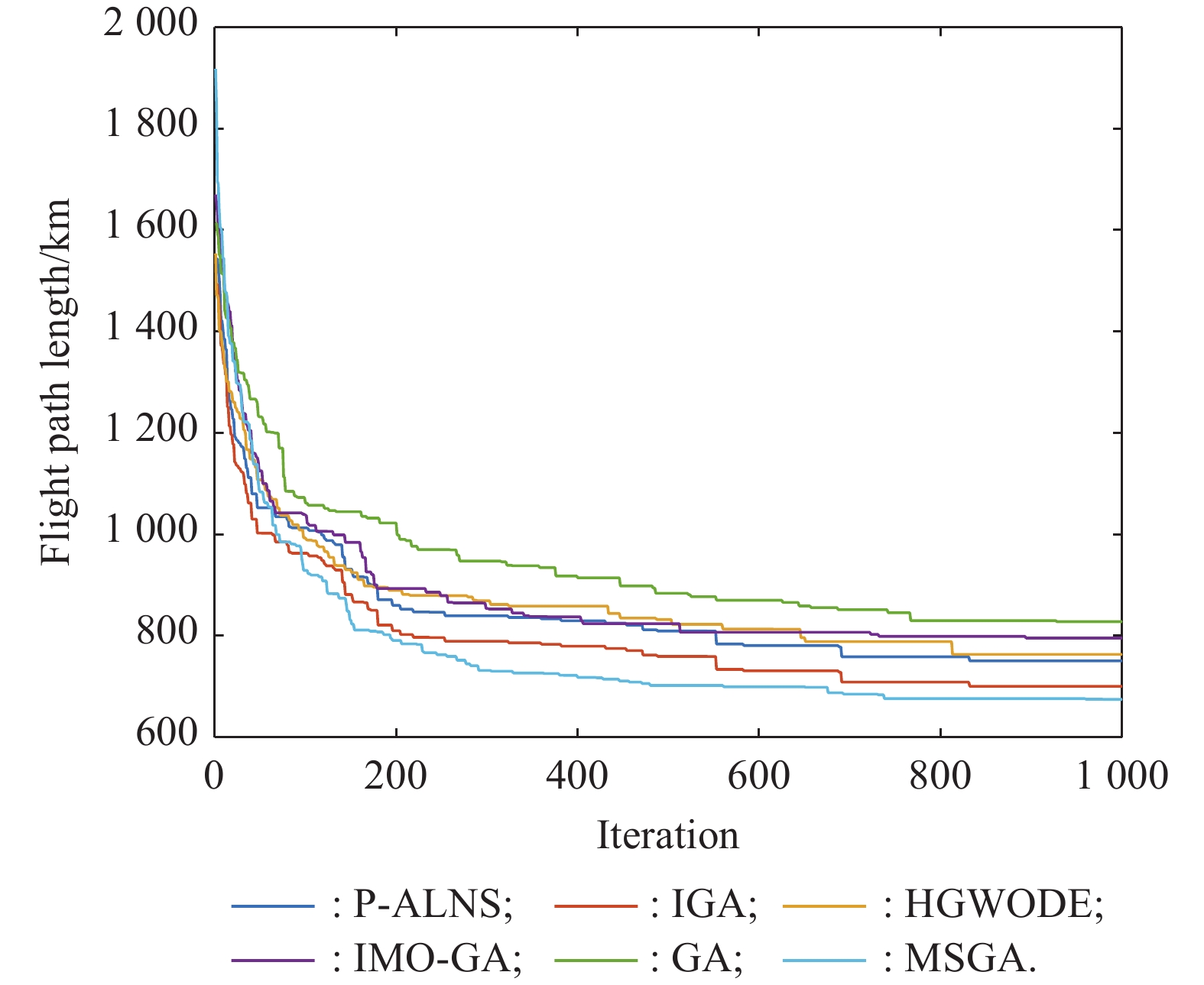
Table 7
t-test results of MSGA"
| Dimension | Comparison algorithm |
| 17D | P-ALNS(−); IGA(−); HGWODE(−); IMO-GA(−); GA(−); |
| 36D | P-ALNS(−); IGA(−); HGWODE(−); IMO-GA(−); GA(−); |
| 60D | P-ALNS(−); IGA(−); HGWODE(−); IMO-GA(−); GA(−); |
| 1 |
REIS H C, TURK V Detection of forest fire using deep convolutional neural networks with transfer learning approach. Applied Soft Computing, 2023, 143, 110362.
doi: 10.1016/j.asoc.2023.110362 |
| 2 |
YANG X B, HUA Z C, ZHANG L, et al Preferred vector machine for forest fire detection. Pattern Recognition, 2023, 143, 109722.
doi: 10.1016/j.patcog.2023.109722 |
| 3 |
SANKEY T T, TANGO L, TATUM J, et al Forest fire, thinning, and flood in wildland-urban interface: UAV and lidar-based estimate of natural disaster impacts. Landscape Ecology, 2024, 39 (3): 58.
doi: 10.1007/s10980-024-01811-5 |
| 4 |
SUDHAKAR S, VIJAYAKUMAR V, KUMAR C S, et al Unmanned aerial vehicle (UAV) based forest fire detection and monitoring for reducing false alarms in forest-fires. Computer Communications, 2020, 149, 1- 16.
doi: 10.1016/j.comcom.2019.10.007 |
| 5 | WANG H, FENG Y, HUANG X, et al. An AI-based action detection UAV system to improve firefighter safety. Proc. of the International Conference on Human-Computer Interaction, 2023: 632−641. |
| 6 |
MOSHREF-JAVADI M, HEMMATI A, WINKENBACH M A truck and drones model for last-mile delivery: a mathematical model and heuristic approach. Applied Mathematical Modelling, 2019, 80, 256- 267.
doi: 10.1016/j.apm.2019.11.020 |
| 7 |
CHEN R, CHEN J, XU Q Y Joint channel access and power control optimization in large-scale UAV networks: a hierarchical mean field game approach. IEEE Trans. on Vehicular Technology, 2023, 72 (2): 1982- 1996.
doi: 10.1109/TVT.2022.3210287 |
| 8 | GUO Y C, LIU X X, LIU X H, et al FC-RRT*: an improved path planning algorithm for UAV in 3D complex environment. ISPRS International Journal of Geo-Information, 2022, 11, 524- 533. |
| 9 |
LIU L X, WANG X, YANG X, et al Path planning techniques for mobile robots: review and prospect. Expert Systems with Applications, 2023, 227, 120254.
doi: 10.1016/j.eswa.2023.120254 |
| 10 |
ZHANG W, WANG N X, WU W H A hybrid path planning algorithm considering AUV dynamic constraints based on improved A* algorithm and APF algorithm. Ocean Engineering, 2023, 285, 115333.
doi: 10.1016/j.oceaneng.2023.115333 |
| 11 | FAN D K, SHI P. Improvement of Dijkstra’s algorithm and its application in route planning. Proc. of the 7th International Conference on Fuzzy Systems and Knowledge Discovery, 2010: 1901−1904. |
| 12 |
KHAKZAD N A methodology based on Dijkstra’s algorithm and mathematical programming for optimal evacuation in process plants in the event of major tank fires. Reliability Engineering & System Safety, 2023, 236, 109291.
doi: 10.1016/j.ress.2023.109291 |
| 13 |
KNUTH D E A Generalization of Dijkstra’s Algorithm. Information Processing Letters, 1977, 6, 1- 5.
doi: 10.1016/0020-0190(77)90002-3 |
| 14 | PRASAD N L, RAMKUMAR B 3-D deployment and trajectory planning for relay based uav assisted cooperative communication for emergency scenarios using Dijkstra’s algorithm. IEEE Trans. on Vehicular Technology, 2022, 72 (4): 5049- 5063. |
| 15 | VADAKKEPAT P, TAN K C, WANG M L. Evolutionary artificial potential fields and their application in real time robot path planning. Proc. of the Congress on Evolutionary Computation, 2000: 256−263. |
| 16 | CHANG H, CHEN Y C, ZHANG B C, et al Multi-UAV mobile edge computing and path planning platform based on reinforcement learning. IEEE Trans. on Emerging Topics in Computational Intelligence, 2021, 6 (3): 489- 498. |
| 17 |
CHEN Y B, LUO G C, MEI Y S, et al UAV path planning using artificial potential field method updated by optimal control theory. International Journal of Systems Science, 2016, 47 (6): 1407- 1420.
doi: 10.1080/00207721.2014.929191 |
| 18 |
SHI J M, ZHANG J M, LEI H T, et al Joint mission and route planning of unmanned air vehicles via a learning-based heuristic. Journal of Systems Engineering and Electronics, 2023, 34 (1): 81- 98.
doi: 10.23919/JSEE.2023.000005 |
| 19 |
NGUYEN H D, YOSHIHARA I, YAMAMORI K, et al Implementation of an effective hybrid GA for large-scale traveling salesman problems. IEEE Trans. on Systems, Man, and Cybernetics, Part B (Cybernetics), 2007, 37 (1): 92- 99.
doi: 10.1109/TSMCB.2006.880136 |
| 20 |
ZHENG J Z, ZHONG J L, CHEN M L, et al A reinforced hybrid genetic algorithm for the traveling salesman problem. Computers & Operations Research, 2023, 157, 106249.
doi: 10.1016/j.cor.2023.106249 |
| 21 |
CHOONG S S, WONG L P, LIM C P An artificial bee colony algorithm with a Modified Choice Function for the traveling salesman problem. Swarm and Evolutionary Computation, 2019, 44, 622- 635.
doi: 10.1016/j.swevo.2018.08.004 |
| 22 |
SAHIN M Solving TSP by using combinatorial Bees algorithm with nearest neighbor method. Neural Computing and Applications, 2023, 35 (2): 1863- 1879.
doi: 10.1007/s00521-022-07816-y |
| 23 |
LI J X, YANG X R, YANG Y J, et al Cooperative mapping task assignment of heterogeneous multi-UAV using an improved genetic algorithm. Knowledge-Based Systems, 2024, 296, 111830.
doi: 10.1016/j.knosys.2024.111830 |
| 24 |
YU X B, JIANG N J, WANG X M, et al A hybrid algorithm based on grey wolf optimizer and differential evolution for UAV path planning. Expert Systems with Applications, 2023, 215, 119327.
doi: 10.1016/j.eswa.2022.119327 |
| 25 |
ZOU K L, WANG F, ZHANG F, et al Precision route planning method based on UAV remote sensing and genetic algorithm for weeding machine. Applied Intelligence, 2023, (53): 11203- 11213.
doi: 10.1007/s10489-022-03965-8 |
| 26 | ZHAO Z Y, ZHOU M C, LIU S X Iterated greedy algorithms for flow-shop scheduling problems: a tutorial. IEEE Trans. on Automation Science and Engineering, 2021, 19 (3): 1941- 1959. |
| 27 |
DIMIC G, SIDIROPOULOS N D On downlink beamforming with greedy user selection: performance analysis and a simple new algorithm. IEEE Trans. on Signal processing, 2005, 53 (10): 3857- 3868.
doi: 10.1109/TSP.2005.855401 |
| 28 |
LIU H J, LEE A, LEE W S, et al DAACO: adaptive dynamic quantity of ant ACO algorithm to solve the traveling salesman problem. Complex & Intelligent Systems, 2023, 9 (4): 4317- 4330.
doi: 10.1007/s40747-022-00949-6 |
| 29 |
GHALI M, ELGHALI S, AIFAOUI N Genetic algorithm optimization based on manufacturing prediction for an efficient tolerance allocation approach. Journal of Intelligent Manufacturing, 2024, 35 (4): 1649- 1670.
doi: 10.1007/s10845-023-02132-1 |
| 30 |
TANG L N, SHAO G F Drone remote sensing for forestry research and practices. Journal of Forestry Research, 2015, 26, 791- 797.
doi: 10.1007/s11676-015-0088-y |
| 31 |
FURCHì A, LIPPI M, CARPIO R F, et al Route optimization in precision agriculture settings: a multi-steiner TSP formulation. IEEE Trans. on Automation Science and Engineering, 2022, 9 (6): 643.
doi: 10.1109/tase.2022.3204584 |
| 32 |
LIU J H, LAMPINEN J A fuzzy adaptive differential evolution algorithm. Soft Computing, 2005, 9, 448- 462.
doi: 10.1007/s00500-004-0363-x |
| [1] | Yuzhen ZHOU, Yao LIU, Jincai HUANG, Jianmai SHI. Three-dimensional path planning algorithm for UAV based on obstacle envelopes [J]. Journal of Systems Engineering and Electronics, 2026, 37(3): 1042-1058. |
| [2] | Yongsheng DUAN, Junning ZHANG, Lei XUE, Ying XU. RF-IRSynNet: cross-modal radio frequency-infrared fusion for robust UAV recognition [J]. Journal of Systems Engineering and Electronics, 2026, 37(3): 767-778. |
| [3] | Hongda GAO, Shiqi WEI, Jianhui CHEN, Qing’an QIU. Dynamic period detection and maintenance optimization for the Wiener degradation dependence process systems [J]. Journal of Systems Engineering and Electronics, 2026, 37(3): 952-963. |
| [4] | Guangwei WANG, Le YANG, Zhikun TAN, Yichen LI, Wenbin YU. Hybrid path planning for USVs using improved A* and DWA [J]. Journal of Systems Engineering and Electronics, 2026, 37(1): 45-63. |
| [5] | Minghao LI, An ZHANG, Wenhao BI, Qiucen FAN, Pan YANG. Mission capability assessment of UAV swarms based on UAF and interval-valued spherical fuzzy ANP [J]. Journal of Systems Engineering and Electronics, 2026, 37(1): 225-241. |
| [6] | Xiaoduo LI, He LUO, Guoqiang WANG, Youlong YIN. Improved simulated annealing algorithm for UAV path planning with uncertain flight time [J]. Journal of Systems Engineering and Electronics, 2026, 37(1): 272-286. |
| [7] | Yun ZHONG, Lujun WAN, Jieyong ZHANG. MAV-UAV combat organization’s force formation plan generation based on NSGA-III [J]. Journal of Systems Engineering and Electronics, 2026, 37(1): 307-317. |
| [8] | Zhiyong SONG, Yuntao XU. Long time hybrid integration of radar rotating target [J]. Journal of Systems Engineering and Electronics, 2025, 36(6): 1477-1487. |
| [9] | Meigen HUANG, Tao WANG, Tian JING, Song YANG, Xin ZHOU, Hua HE. Case-based reasoning of operation strategies recommendation for UAV swarm [J]. Journal of Systems Engineering and Electronics, 2025, 36(6): 1548-1561. |
| [10] | Maksim STEPANOV, Alexey KARASEV. Synthesis of thinned linear antenna array using genetic algorithm to lower peak sidelobe level and maintain half-power beamwidth [J]. Journal of Systems Engineering and Electronics, 2025, 36(5): 1113-1121. |
| [11] | Wenrui DING, Xiaorong ZHANG, Yufeng WANG, Qingyi LIU, Fuyuan MA. A review on fission-fusion behavior in unmanned aerial vehicle swarm systems [J]. Journal of Systems Engineering and Electronics, 2025, 36(5): 1216-1234. |
| [12] | Zhenlin ZHOU, Teng LONG, Jingliang SUN, Junzhi LI. Hierarchical cooperative path planning method using three-dimensional velocity-obstacle strategy for multiple fixed-wing UAVs [J]. Journal of Systems Engineering and Electronics, 2025, 36(5): 1342-1352. |
| [13] | Hang CHEN, Yajie DOU, Ziyi CHEN, Qingyang JIA, Chen ZHU, Haoxuan CHEN. A hybrid genetic algorithm to the program optimization model based on a heterogeneous network [J]. Journal of Systems Engineering and Electronics, 2025, 36(4): 994-1005. |
| [14] | Linmeng WANG, Yuhui WANG, Mou CHEN, Shulin DING. Multi-round dynamic game decision-making of UAVs based on decision tree [J]. Journal of Systems Engineering and Electronics, 2025, 36(4): 1006-1016. |
| [15] | Xunhua DAI, Jinhu TU, Quan QUAN. RflySim ToolChain: a rapid development and validation toolchain for intelligent unmanned swarm systems [J]. Journal of Systems Engineering and Electronics, 2025, 36(4): 1077-1093. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||