
Journal of Systems Engineering and Electronics ›› 2026, Vol. 37 ›› Issue (3): 1042-1058.doi: 10.23919/JSEE.2026.000126
• CONTROL THEORY AND APPLICATION • Previous Articles
Yuzhen ZHOU1( ), Yao LIU2(), Jincai HUANG2(), Jianmai SHI2,*()
), Yao LIU2(), Jincai HUANG2(), Jianmai SHI2,*()
Received:2024-11-18
Online:2026-06-18
Published:2026-06-29
Contact:
Jianmai SHI
E-mail:yuzhen_zyz@163.com;liuyao13@nudt.edu.cn;huangjincai@nudt.edu.cn;jianmaishi@gmail.com
Supported by:Yuzhen ZHOU, Yao LIU, Jincai HUANG, Jianmai SHI. Three-dimensional path planning algorithm for UAV based on obstacle envelopes[J]. Journal of Systems Engineering and Electronics, 2026, 37(3): 1042-1058.

Fig 1
UAV delivery and charging scenarios"
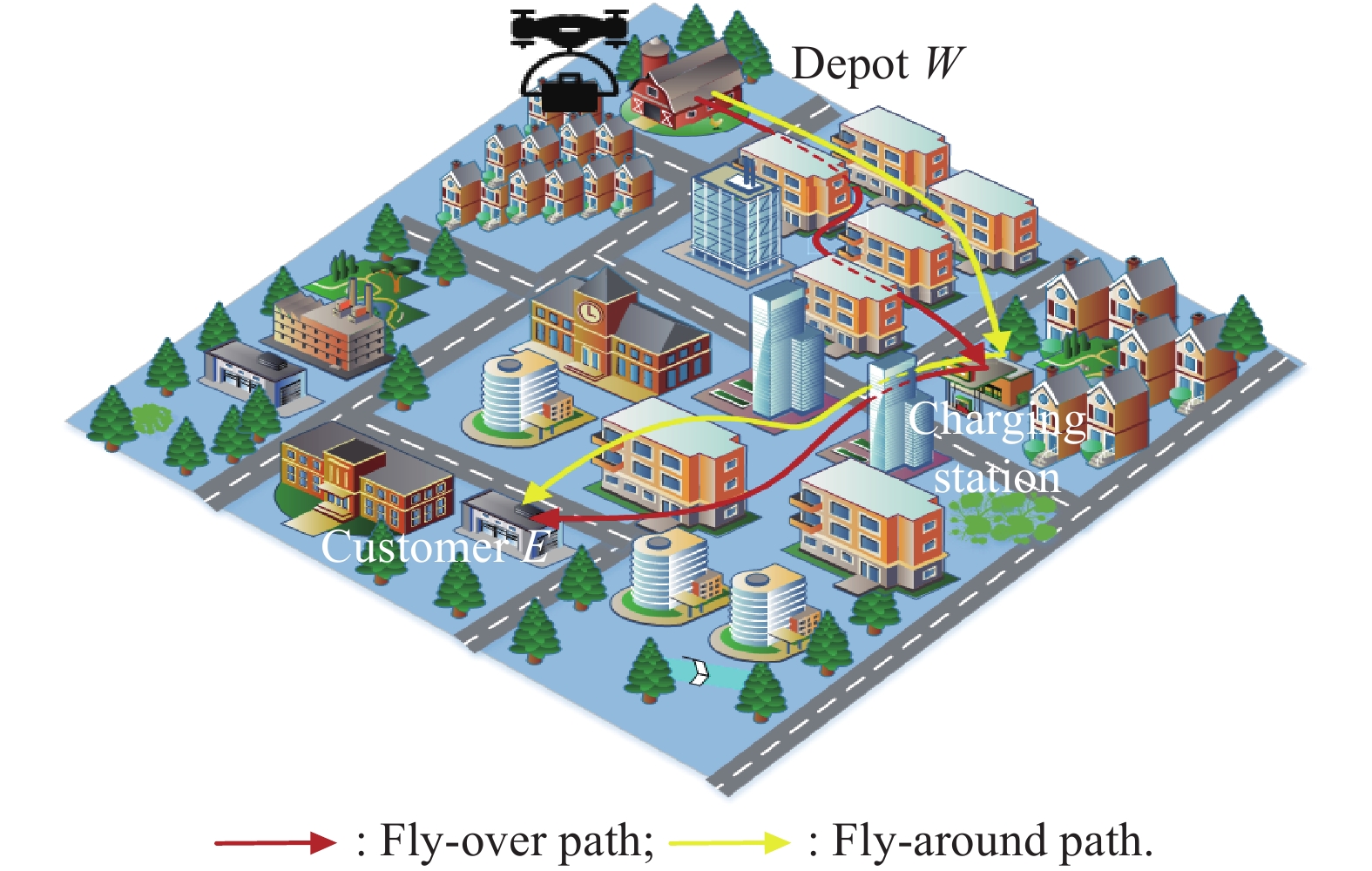
Table 1
Definition of notations describing UAV"
| Notation | Description |
| Maximum UAV power | |
| The waypoint | |
| The energy consumption between | |
| The net weight of the drone | |
| The weight of the battery | |
| The weight of the cargo | |
| The lift-to-drag ratio, related to speed | |
| The energy transfer efficiency | |
| g | The gravitational acceleration |
| The flight speed | |
| The minimum turning radius | |
| The limb rate | |
| The minimum safety distance | |
| The maximum altitude | |
| The obstacles ( | |
| The coordinates of the centre point of the obstacle | |
| The length, width and height of the obstacle |
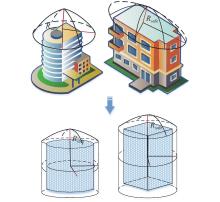
Fig 2
Envelope of obstacles"
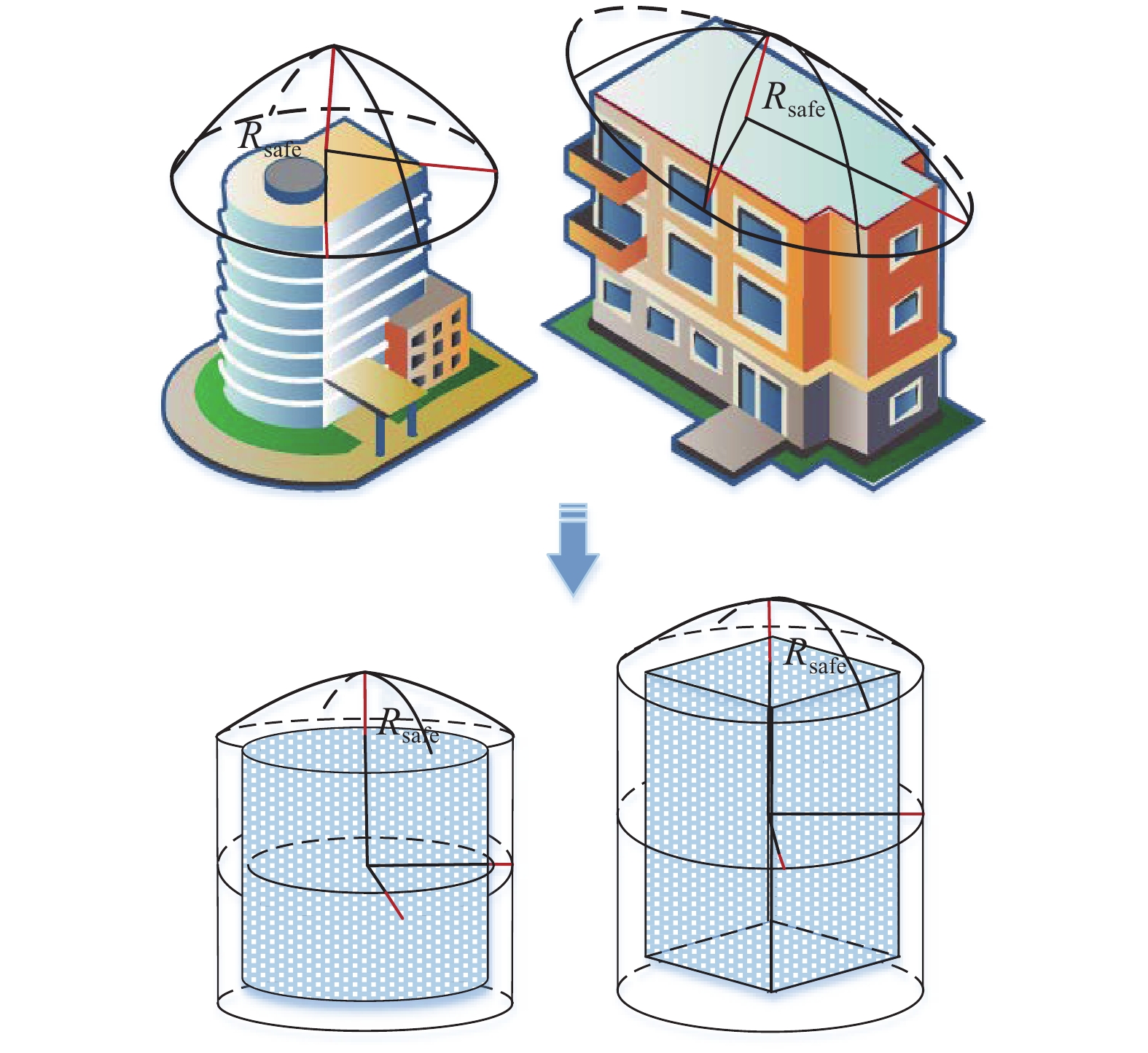
Table 2
Definition of notations"
| Notation | Description |
| Points set | |
| Obstacle list | |
| Generated path points | |
| Origin and destination points, i.e., two vertices of each sub-path | |
| Set of determined waypoints used to generate collision-free edges in order | |
| Set of candidate waypoints | |
| Set that records the obstacles avoided | |
| The cruising altitude |
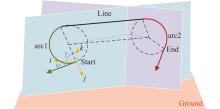
Fig 3
Three-dimensional Dubins curves"
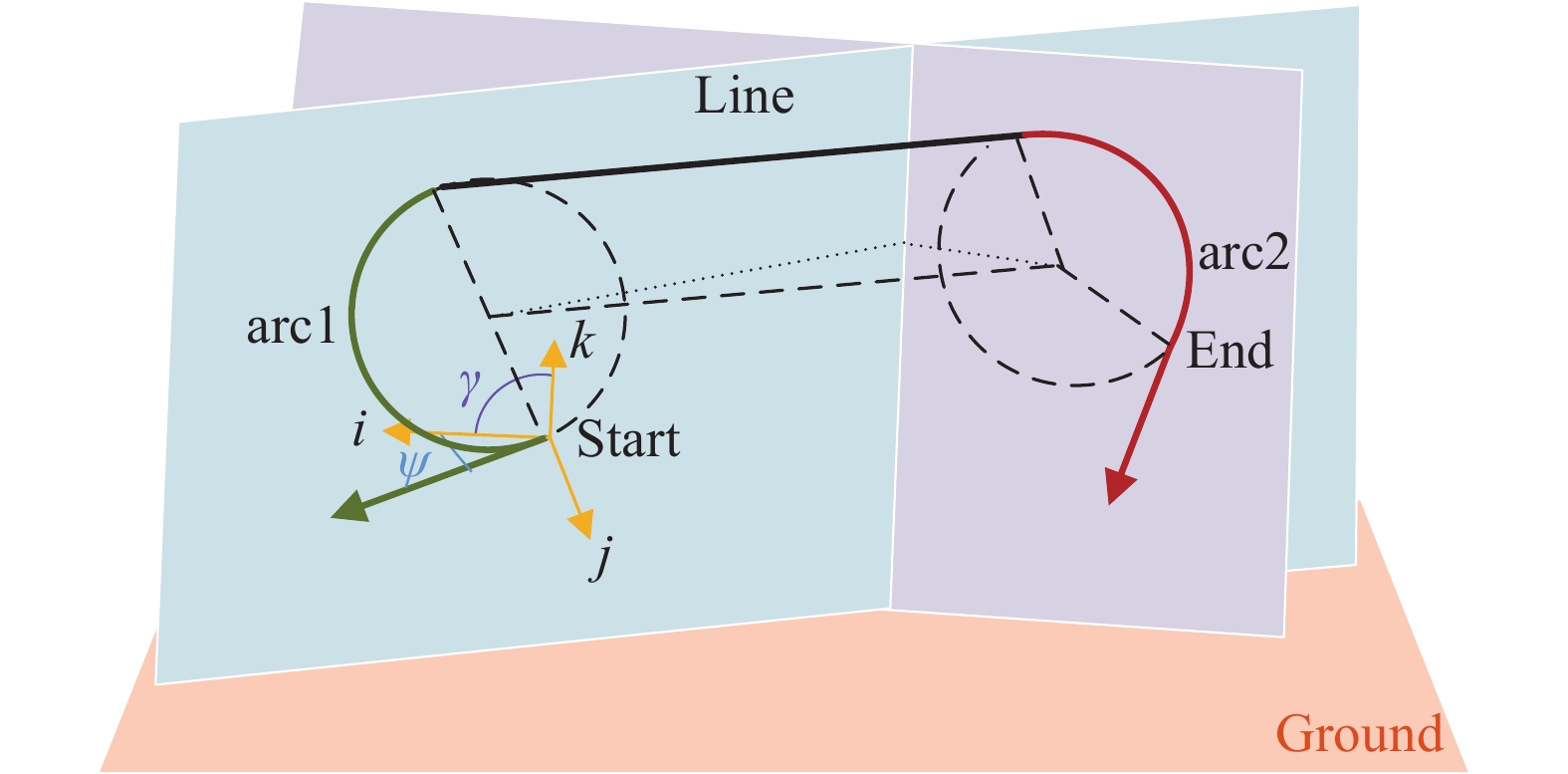
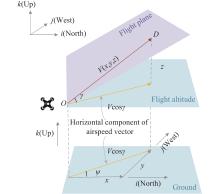
Fig 4
Graphical representation of aircraft kinematic model"
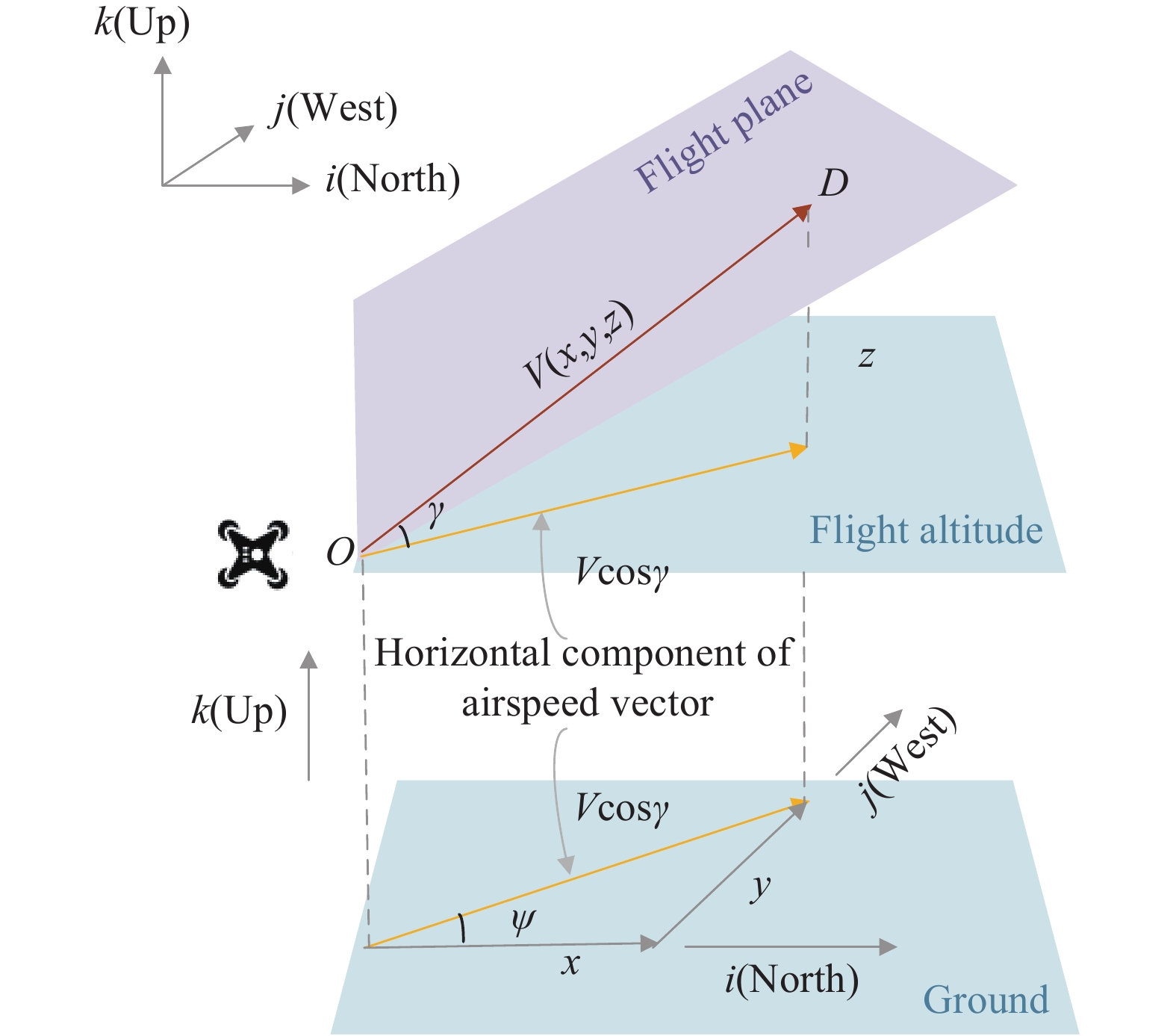

Fig 5
Flight avoidance of obstacles"
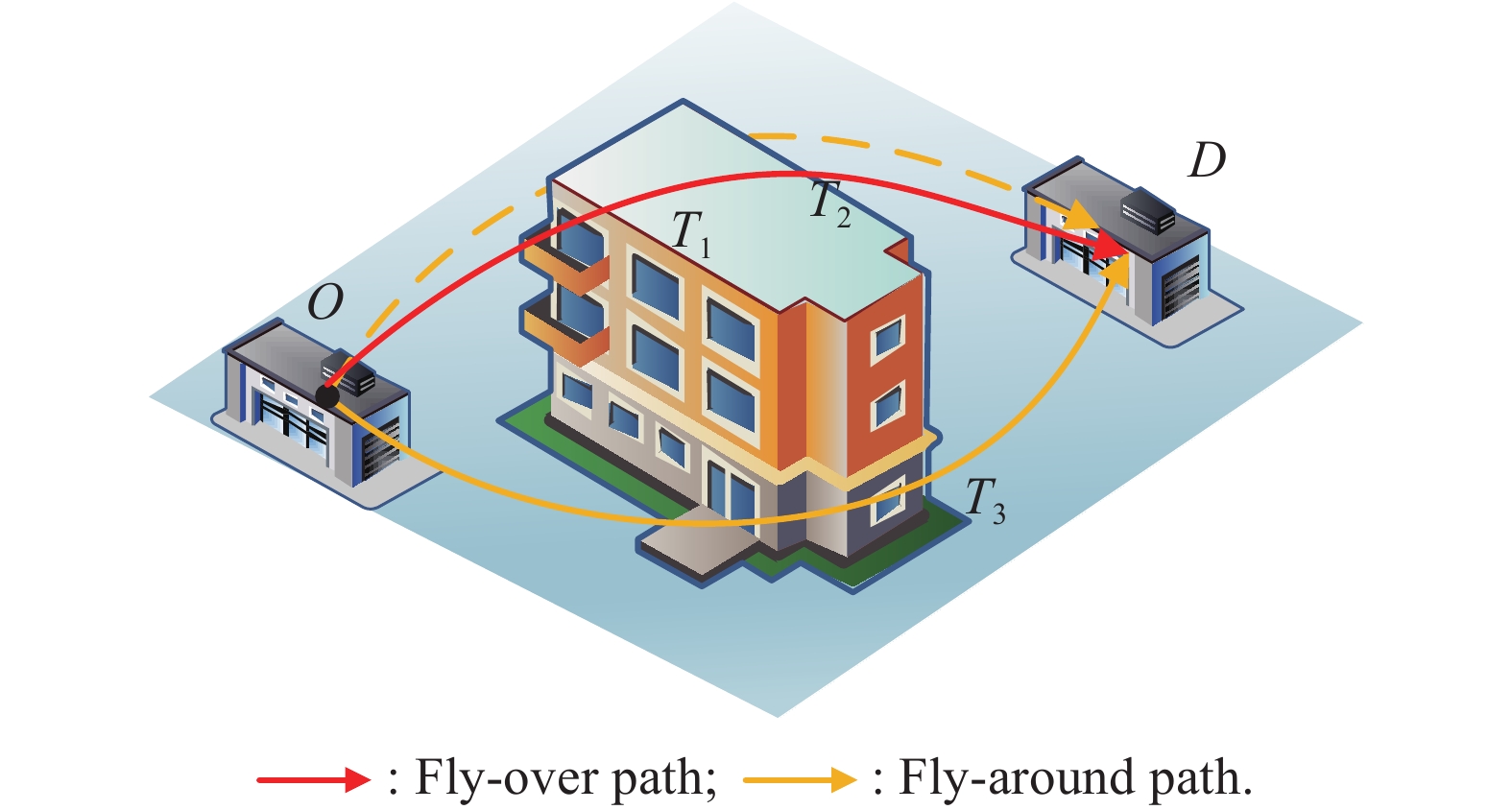
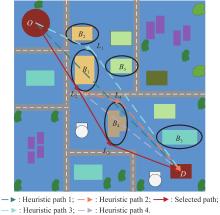
Fig 6
Selection of fly-around points"
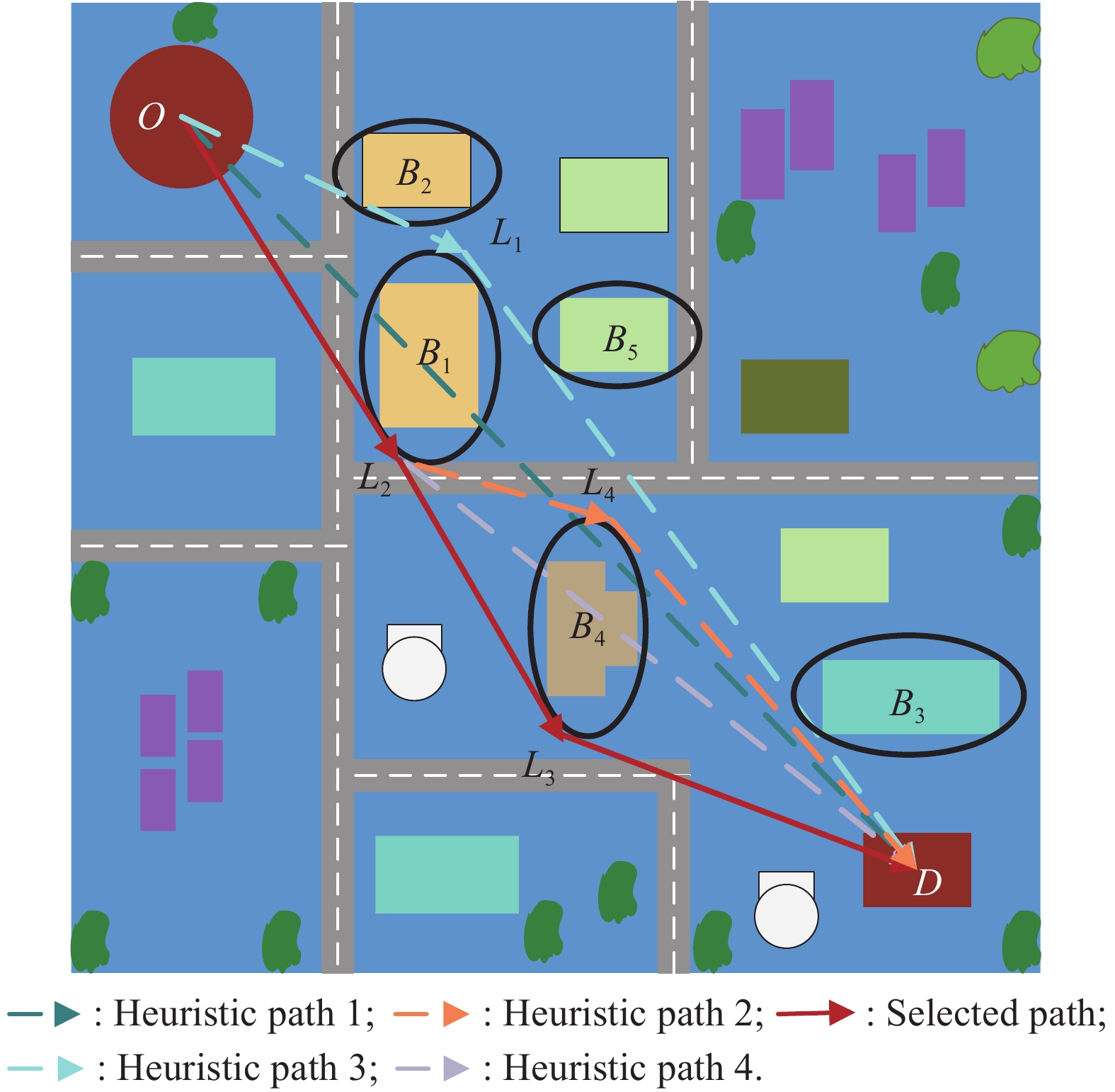
Fig 7
Selection of fly over points"

Fig 8
Example instances in five environments"
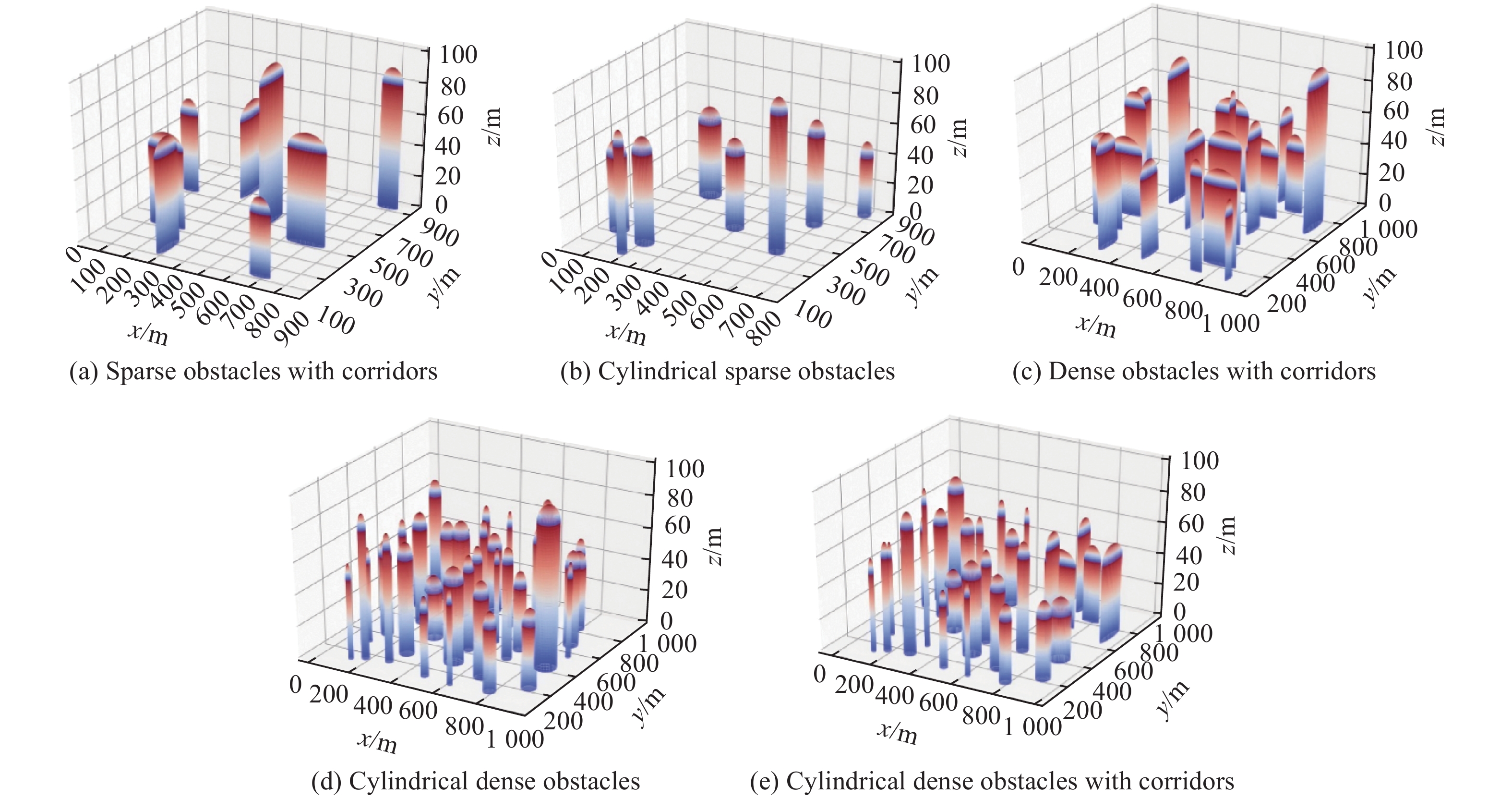
Table 3
Details of the fifteen examples"
| Example | Environment | Number of obstacles | Size/km | Height of obstacles/m |
| E1 | 8 | 1*1 | 30−100 | |
| E2 | 8 | 1*1 | 30−100 | |
| E3 | 20 | 1*1 | 30−100 | |
| E4 | 40 | 1*1 | 30−100 | |
| E5 | 30 | 1*1 | 30−100 | |
| E6 | 8 | 2*2 | 30−100 | |
| E7 | 8 | 2*2 | 30−100 | |
| E8 | 20 | 2*2 | 30−100 | |
| E9 | 40 | 2*2 | 30−100 | |
| E10 | 30 | 2*2 | 30−100 | |
| E11 | 32 | 2*2 | 30−100 | |
| E12 | 32 | 2*2 | 30−100 | |
| E13 | 80 | 2*2 | 30−100 | |
| E14 | 160 | 2*2 | 30−100 | |
| E15 | 120 | 2*2 | 30−100 |
Table 4
Experimental results in simulated environment"
| Example | Energy consumption/kWh | Gap/% | Time/s | ||||||||||||||
| Dubins-RRT* | SAS | APF | 3D-TG | 3DE-PP | Dubins-RRT* | SAS | APF | 3D-TG | 3DE-PP | Dubins-RRT* | SAS | APF | 3D-TG | 3DE-PP | |||
| E1 | 1.73 | 1.58 | 1.60 | 1.60 | 1.55 | 11.54 | 2.26 | 3.59 | 3.12 | 0.00 | 343.23 | 0.33 | 0.01 | 0.02 | 1.03 | ||
| E2 | 1.60 | 1.57 | 1.57 | 1.59 | 1.53 | 4.75 | 2.90 | 2.99 | 4.02 | 0.00 | 539.25 | 0.56 | 0.01 | 0.00 | 0.91 | ||
| E3 | 1.67 | 1.59 | 1.76 | 1.61 | 1.57 | 6.95 | 1.35 | 12.76 | 2.86 | 0.00 | 525.46 | 0.60 | 0.02 | 0.01 | 1.26 | ||
| E4 | 1.85 | 1.57 | 1.87 | 1.56 | 1.61 | 18.76 | 1.11 | 20.47 | 0.00 | 3.48 | 556.02 | 0.02 | 0.02 | 0.01 | 1.11 | ||
| E5 | 1.89 | 1.56 | 2.46 | 1.58 | 1.54 | 22.47 | 1.02 | 59.56 | 2.71 | 0.00 | 491.28 | 0.01 | 0.03 | 0.01 | 1.24 | ||
| E6 | 3.10 | 3.09 | 2.35 | 2.82 | 2.72 | 31.52 | 31.18 | 0.00 | 19.87 | 15.56 | 693.71 | 0.09 | 0.01 | 0.44 | 0.96 | ||
| E7 | 3.18 | 2.89 | 2.77 | 2.83 | 2.74 | 16.19 | 5.83 | 1.13 | 3.54 | 0.00 | 490.25 | 0.96 | 0.04 | 0.01 | 0.92 | ||
| E8 | 3.33 | 2.88 | 3.02 | 2.84 | 2.74 | 21.64 | 5.21 | 10.33 | 3.72 | 0.00 | 509.06 | 1.09 | 0.03 | 0.02 | 1.17 | ||
| E9 | 3.56 | 3.22 | 3.15 | 2.92 | 2.90 | 22.72 | 11.19 | 8.67 | 0.89 | 0.00 | 305.78 | 1.26 | 0.02 | 0.03 | 1.54 | ||
| E10 | 2.84 | 2.92 | 3.30 | 2.84 | 2.81 | 1.16 | 3.95 | 17.65 | 1.27 | 0.00 | 775.14 | 1.84 | 0.07 | 0.01 | 1.71 | ||
| E11 | 3.79 | 2.96 | 2.92 | 2.78 | 2.77 | 36.97 | 6.89 | 5.63 | 0.56 | 0.00 | 402.80 | 0.07 | 0.05 | 0.01 | 1.31 | ||
| E12 | 3.33 | 2.92 | 3.05 | 2.88 | 2.81 | 18.37 | 3.76 | 8.23 | 2.33 | 0.00 | 661.65 | 0.05 | 0.02 | 0.01 | 0.88 | ||
| E13 | 3.59 | 2.92 | 3.50 | 2.83 | 2.89 | 27.01 | 3.20 | 23.73 | 0.00 | 2.14 | 920.22 | 0.53 | 0.04 | 0.03 | 1.76 | ||
| E14 | 3.94 | 2.81 | 3.72 | 2.91 | 2.87 | 40.21 | 0.00 | 32.28 | 3.40 | 2.12 | 0.24 | 0.10 | 0.03 | 1.74 | |||
| E15 | 3.53 | 2.81 | 3.27 | 2.82 | 2.80 | 26.26 | 0.25 | 16.83 | 0.76 | 0.00 | 727.30 | 0.91 | 0.07 | 0.02 | 1.63 | ||
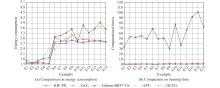
Fig 9
Comparison of five algorithms"
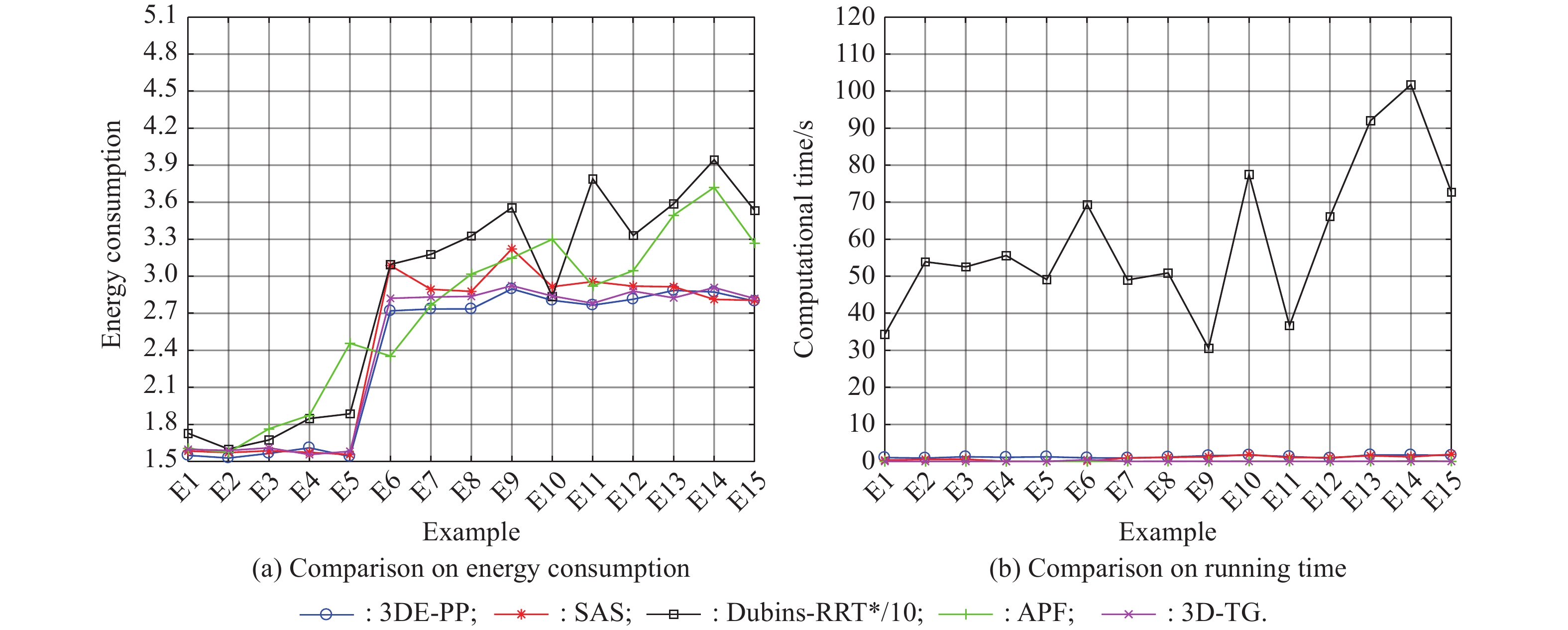

Fig 10
Presentation of the path of the examples"


Fig 11
Layout of the actual case"

Fig 12
Distribution of customers and charging station"
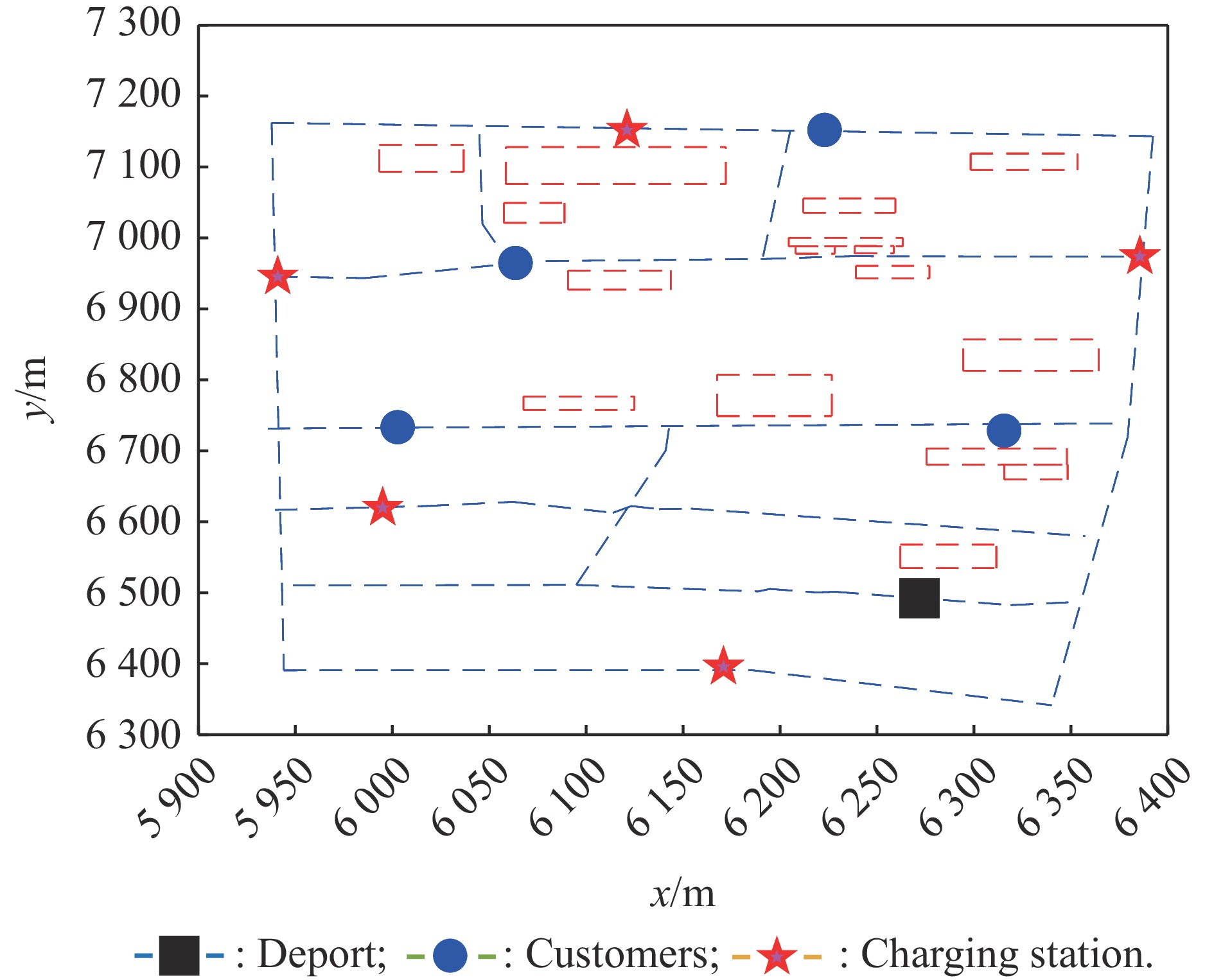

Fig 13
Results of the actual case"
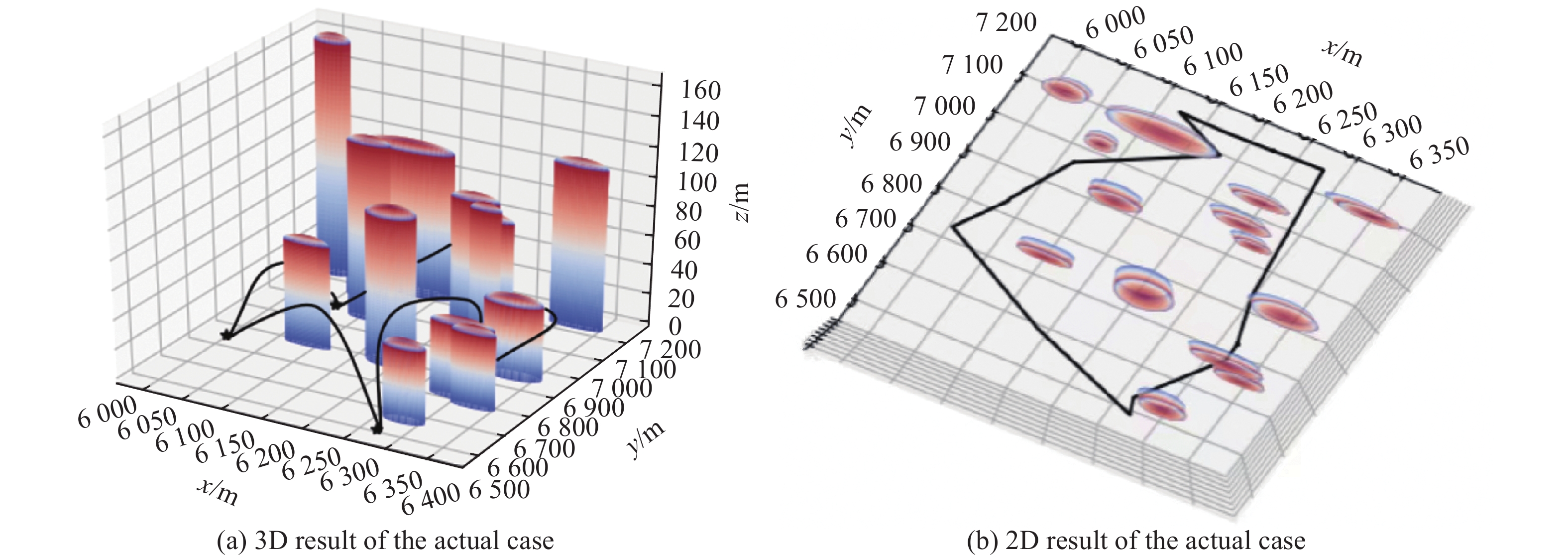
Table 5
Impact of safety distances"
| Example | Energy consumption/Wh | |
| 3DE-PP without fly-over | 3DE-PP | |
| 1 | ||
| 2 | ||
| 3 | ||
| 4 | ||
| 5 | ||
| 6 | ||
| 7 | ||
| 8 | ||
| 9 | ||
| 10 | ||
| 11 | ||
| 12 | ||
| 13 | ||
| 14 | ||
| 15 | ||
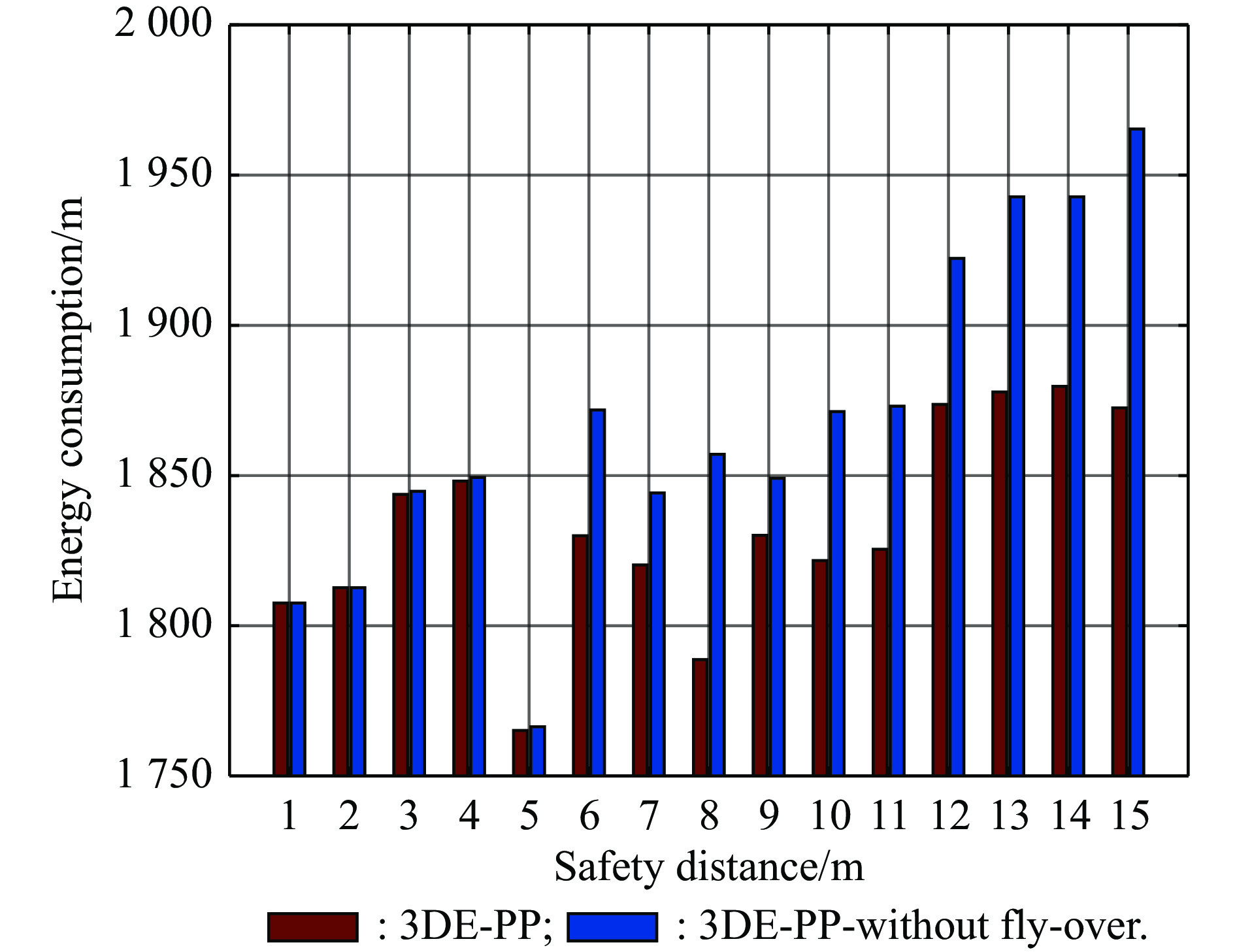
Fig 14
Computational results under different safety distance"
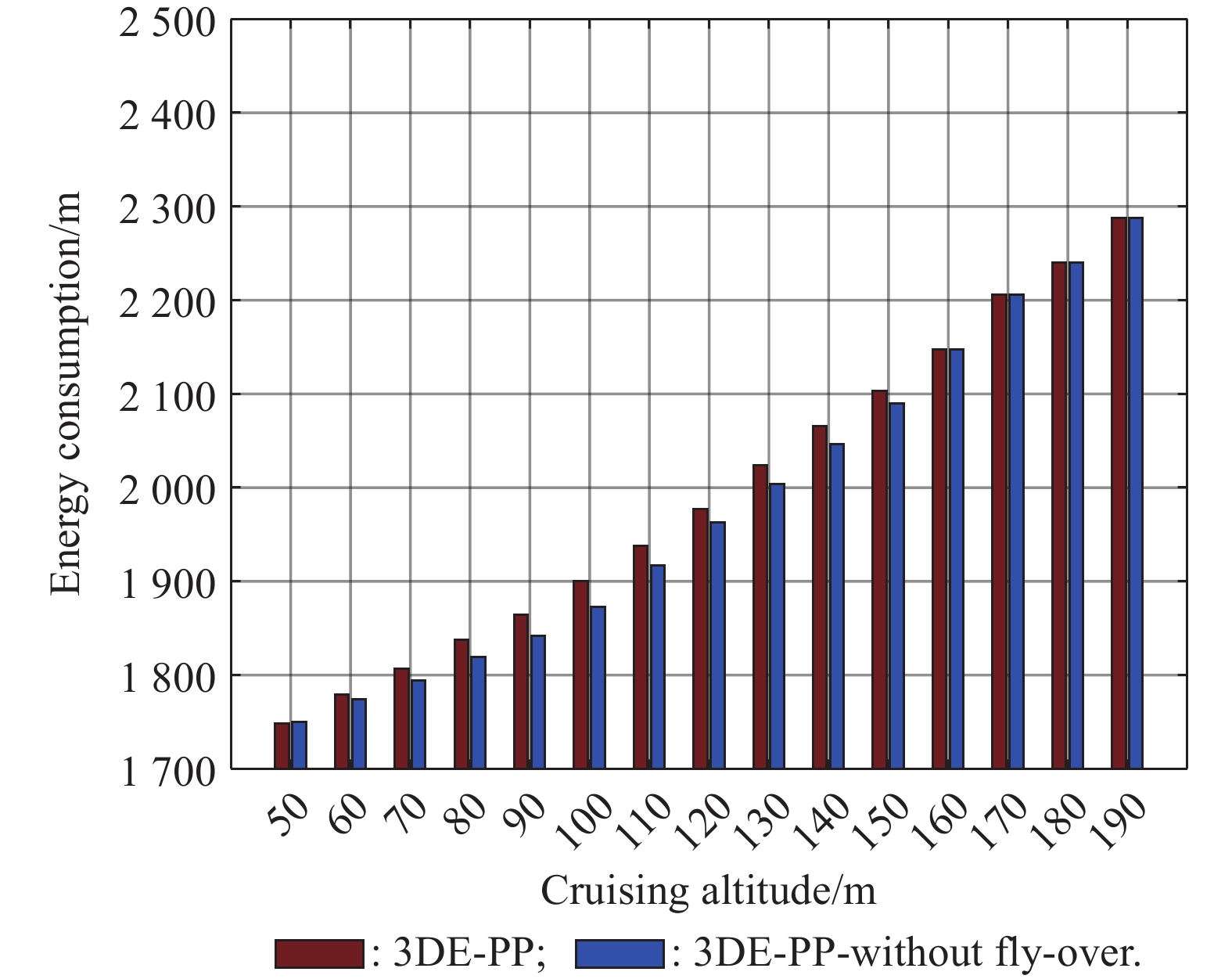
Table 6
Impact of cruising altitude"
| Cruising altitude | Energy consumption/Wh | |
| 3DE-PP without fly-over | 3DE-PP | |
| 50 | ||
| 60 | ||
| 70 | ||
| 80 | ||
| 90 | ||
| 100 | ||
| 110 | ||
| 120 | ||
| 130 | ||
| 140 | ||
| 150 | ||
| 160 | ||
| 170 | ||
| 180 | ||
| 190 | ||
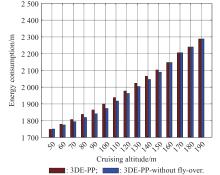
Fig 15
Computational results under different cruising altitudes"
| 1 |
BURNS L D A vision of our transport future. Nature, 2013, 497 (7448): 181- 182.
doi: 10.1038/497181a |
| 2 | LE V S, ZOLFAGHARI A, POLAK J Autonomous cars: the tension between occupant experience and intersection capacity. Transportation Research Part C: Emerging Technologies, 2015, 52, 1- 14. |
| 3 |
JARAŠŪNIENĖ A, IŠORAITĖ M, PETRAŠKA A Developing small-cargo flows in cities using unmanned aerial vehicles. Future Transportation, 2024, 4 (2): 450- 474.
doi: 10.3390/futuretransp4020022 |
| 4 |
FANG Z, SAVKIN A V Strategies for optimized UAV surveillance in various tasks and scenarios: a review. Drones, 2024, 8 (5): 193- 233.
doi: 10.3390/drones8050193 |
| 5 |
AGRAWAL J, ARAFAT M Y Transforming farming: a review of AI-powered UAV technologies in precision agriculture. Drones, 2024, 8 (11): 664- 688.
doi: 10.3390/drones8110664 |
| 6 |
SUN C, FONTANESI G, CANBERK B, et al Advancing UAV communications: a comprehensive survey of cutting-edge machine learning techniques. IEEE Open Journal of Vehicular Technology, 2024, 5, 825- 854.
doi: 10.1109/OJVT.2024.3401024 |
| 7 | PAN Y, LI L F, QIN J J, et al Unmanned aerial vehicle-human collaboration route planning for intelligent infrastructure inspection. Computer-Aided Civil and Infrastructure Engineering, 2024, 39 (14): 2074- 2104. |
| 8 | ZHANG J, DU X, DONG Q C, et al Distributed collaborative complete coverage path planning based on hybrid strategy. Journal of Systems Engineering and Electronics, 2023, 35 (2): 463- 472. |
| 9 | YANG L M, ZHANG X Y, LI Z P, et al A LODBO algorithm for multi-UAV search and rescue path planning in disaster areas. Chinese Journal of Aeronautics, 2025, 38 (2): 1000- 9361. |
| 10 |
JUNG S, KIM H Analysis of amazon prime air UAV delivery service. Journal of Knowledge Information Technology and Systems, 2017, 12 (2): 253- 266.
doi: 10.34163/jkits.2017.12.2.005 |
| 11 | LEVIN A. Alphabet and chipotle are bringing burrito delivery drones to campus. https://www.bloomberg.com/news/articles/2016-09-08/burrito-by-drone-coming-to-campus-in-test-of-alphabet-s-delivery. |
| 12 | FAN F F. JD. com opens first unmanned sorting center. https://www.chinadaily.com.cn/specials/0803huawei.pdf. |
| 13 | MOHANTY S N, RAVINDRA J V R, NARAYANA G S, et al. Drone technology: future trends and practical applications. Hoboken: John Wiley & Sons, 2023. |
| 14 | WALKER R, JIWANI R. Reinventing e-commerce: Amazon’s bet on unmanned vehicle delivery. London: Kellogg School of Management, 2015. |
| 15 | KELLEHER K. UPS, matternet delivering medical samples in North Carolina using drones. https://www.auvsi.org/industry-news/ups-matternet-deliveringmedical-samples-north-carolina-using-drones. |
| 16 |
LEE Y M A study on the current status and case of the logistics industry using drone. Journal of Korea Culture Industry, 2020, 20 (4): 75- 85.
doi: 10.35174/jkci.2020.12.20.4.75 |
| 17 | YANG L, QI J, XIAO J, et al. A literature review of UAV 3D path planning. Proc. of the 11th World Congress on Intelligent Control and Automation, 2014: 2376−2381. |
| 18 | MAZAHERI H, GOLI S, NOUROLLAH A A survey of 3D space path-planning methods and algorithms. ACM Computing Surveys, 2024, 57 (1): 1- 32. |
| 19 | KHAN M T R, MUHAMMAD S M, RU Y, et al Aspects of unmanned aerial vehicles path planning: overview and applications. International Journal of Communication Systems, 2021, 34 (10): 1074- 5351. |
| 20 |
CHEN Q, WANG Y J, SUN Y F An improved dung beetle optimizer for UAV 3D path planning. The Journal of Supercomputing, 2024, 80 (18): 26537- 26567.
doi: 10.1007/s11227-024-06414-0 |
| 21 |
LUO J H, TIAN Y X, WANG Z Y Research on unmanned aerial vehicle path planning. Drones, 2024, 8 (2): 51.
doi: 10.3390/drones8020051 |
| 22 |
PHALAPANYAKOON K, SIRIPONGWUTIKORN P Route planning of heterogeneous unmanned aerial vehicles under recharging and mission time with carrying payload constraints. Journal of Industrial Engineering and Management, 2023, 16 (2): 215- 235.
doi: 10.3926/jiem.4381 |
| 23 | CHEN F, ZHENG Y, WANG Z, et al. RBI-RRT*: efficient sampling-based path planning for high-dimensional state space. Proc. of the IEEE International Conference on Robotics and Automation. 2024: 8721−8727. |
| 24 |
LIU M J, ZHANG H X, YANG J, et al A path planning algorithm for three-dimensional collision avoidance based on potential field and B-spline boundary curve. Aerospace Science and Technology, 2024, 144, 1270- 9638.
doi: 10.1016/j.ast.2023.108763 |
| 25 | JIANG Y, XU X X, ZHENG M Y, et al Evolutionary computation for unmanned aerial vehicle path planning: a survey. Artificial Intelligence Review, 2024, 57, 267. |
| 26 |
ZHANG J D, GUO Y K, ZHENG L H, et al Real-time UAV path planning based on LSTM network. Journal of Systems Engineering and Electronics, 2024, 35 (2): 374- 385.
doi: 10.23919/JSEE.2023.000157 |
| 27 |
SZCZERBA R J, GALKOWSKI P, GLICKTEIN I S, et al Robust algorithm for real-time route planning. IEEE Trans. on Aerospace and Electronic Systems, 2000, 36 (3): 869- 878.
doi: 10.1109/7.869506 |
| 28 |
LIU S, WATTERSON M, MOHTA K, et al Planning dynamically feasible trajectories for quadrotors using safe flight corridors in 3-d complex environments. IEEE Robotics and Automation Letters, 2017, 2 (3): 1688- 1695.
doi: 10.1109/LRA.2017.2663526 |
| 29 |
ZHANG N, ZHANG M, LOW K H 3D path planning and real-time collision resolution of multirotor drone operations in complex urban low-altitude airspace. Transportation Research Part C: Emerging Technologies, 2021, 129, 103123.
doi: 10.1016/j.trc.2021.103123 |
| 30 |
ROHNERT H Shortest paths in the plane with convex polygonal obstacles. Information Processing Letters, 1986, 23 (2): 71- 76.
doi: 10.1016/0020-0190(86)90045-1 |
| 31 |
LIU Y H, ARIMOTO S Path planning using a tangent graph for mobile robots among polygonal and curved obstacles: communication. The International Journal of Robotics Research, 1992, 11 (4): 376- 382.
doi: 10.1177/027836499201100409 |
| 32 |
LIU H, WU G H, ZHOU L, et al Tangent-based path planning for uav in a 3-D low altitude urban environment. IEEE Trans. on Intelligent Transportation Systems, 2023, 24 (11): 12062- 12077.
doi: 10.1109/TITS.2023.3285568 |
| 33 |
CHEN H, CHANG K, AGATE C S UAV path planning with tangent-plus-Lyapunov vector field guidance and obstacle avoidance. IEEE Trans. on Aerospace and Electronic Systems, 2013, 49 (2): 840- 856.
doi: 10.1109/TAES.2013.6494384 |
| 34 |
LIU Y S, WANG Q X, HU H S, et al A novel real-time moving target tracking and path planning system for a quadrotor UAV in unknown unstructured outdoor scenes. IEEE Trans. on Systems, Man, and Cybernetics: Systems, 2018, 49 (11): 2362- 2372.
doi: 10.1109/tsmc.2018.2808471 |
| 35 |
LIU H, LI X M, FAN M F, et al An autonomous path planning method for unmanned aerial vehicle based on a tangent intersection and target guidance strategy. IEEE Trans. on Intelligent Transportation Systems, 2020, 23 (4): 3061- 3073.
doi: 10.1109/tits.2020.3030444 |
| 36 | YANG F, LEE D H, KELLER J, et al. Graph-based topological exploration planning in large-scale 3D environments. Proc. of the IEEE International Conference on Robotics and Automation, 2021: 12730−12736. |
| 37 |
LIANG X, MENG G L, XU Y M, et al A geometrical path planning method for unmanned aerial vehicle in 2D/3D complex environment. Intelligent Service Robotics, 2018, 11 (3): 301- 312.
doi: 10.1007/s11370-018-0254-0 |
| 38 | KARAMAN S, WALTER M R, PEREZ A, et al. Anytime motion planning using the RRT. Proc. of the IEEE International Conference on Robotics and Automation. 2011: 1478−1483. |
| 39 |
LIU J, XU T, YANG S X, et al Navigation and visual feedback control for magnetically driven helical miniature swimmers. IEEE Trans. on Industrial Informatics, 2019, 16 (1): 477- 487.
doi: 10.1109/tii.2019.2913762 |
| 40 | GAMMELL J D, SRINIVASA S S, BARFOOT T D. Informed RRT*: optimal sampling-based path planning focused via direct sampling of an admissible ellipsoidal heuristic. Proc. of the IEEE/RSJ International Conference on Intelligent Robots and Systems, 2014: 2997−3004. |
| 41 | WARREN C W. Global path planning using artificial potential fields. Proc. of the IEEE International Conference on Robotics and Automation, 1989: 316−321. |
| 42 |
ROBERGE V, TARBOUCHI M, LABONTÉ G Comparison of parallel genetic algorithm and particle swarm optimization for real-time UAV path planning. IEEE Trans. on Industrial Informatics, 2012, 9 (1): 132- 141.
doi: 10.1109/tii.2012.2198665 |
| 43 |
WU Y, LOW K H, PANG B, et al Swarm-based 4D path planning for drone operations in urban environments. IEEE Trans. on Vehicular Technology, 2021, 70 (8): 7464- 7479.
doi: 10.1109/TVT.2021.3093318 |
| 44 | VENTURINI F, MASON F, PASE F, et al. Distributed reinforcement learning for flexible UAV swarm control with transfer learning capabilities. Proc. of the 6th ACM Workshop on Micro Aerial Vehicle Networks, Systems, and Applications, 2020. DOI: 10.1145/3396864.3399701. |
| 45 | ZHANG C Q, ZHOU W J, QIN W D, et al A novel UAV path planning approach: heuristic crossing search and rescue optimization algorithm. Expert Systems with Applications, 2023, 215, 119- 243. |
| 46 | XU J Y, SHI M J, TANG F, et al. Dubins-A*: a new global path planning scheme for fixed-wing UAV with irregular obstacles avoidance. Proc. of the 7th International Conference on Electronics Technology, 2024: 636−641. |
| 47 | KUMAR D P, DARBHA S, MANYAM S G, et al. A new approach to motion planning in 3D for a dubins vehicle: special case on a sphere. https://arxiv.org/abs/2504.01215. |
| 48 |
FIGLIOZZI M A Lifecycle modeling and assessment of unmanned aerial vehicles (drones) CO2e emissions. Transportation Research Part D: Transport and Environment, 2017, 57, 251- 261.
doi: 10.1016/j.trd.2017.09.011 |
| 49 | REKLEITIS I M, DUDEK G, MILIOS E E. Graph-based exploration using multiple robots. Proc. of the International Symposium on Distributed Autonomous Robotic Systems, 2000: 241−250. |
| 50 |
CLARKE G, WRIGHT J W Scheduling of vehicles from a central depot to a number of delivery points. Operations Research, 1964, 12 (4): 568- 581.
doi: 10.1007/978-3-642-27922-5_18 |
| 51 | CHITSAZ H, LAVALLE S M. Time-optimal paths for a Dubins airplane. Proc. of the IEEE 46th Conference on Decision and Control, 2007: 2379−2384. |
| 52 | MCLAIN T, BEARD R W, OWEN M. Implementing Dubins airplane paths on fixed-wing UAVs. Dordrecht: Springer Netherlands, 2014. |
| 53 | HOTA S, GHOSE D. Optimal geometrical path in 3D with curvature constraint. Proc. of the IEEE/RSJ International Conference on Intelligent Robots and Systems, 2010: 113−118. |
| 54 | FREITAS E J R, COHEN M W, NETO A A, et al DE3D-NURBS: a differential evolution-based 3D path-planner integrating kinematic constraints and obstacle avoidance. Knowledge-Based Systems, 2024, 300, 112084. |
| 55 |
TSARDOULIAS E G, ILIAKOPOULOU A, KARGAKOS A, et al A review of global path planning methods for occupancy grid maps regardless of obstacle density. Journal of Intelligent & Robotic Systems, 2016, 84 (1): 829- 858.
doi: 10.1007/s10846-016-0362-z |
| 56 | BI C Y, LIU J H, WANG J A, et al. Motion planning for fixed-wing UAV using modified Dubins-RRT* algorithm. Proc. of the International Conference on Guidance, Navigation and Control, 2024: 128−138. |
| 57 |
LAU D, EDEN J, OETOMO D Fluid motion planner for nonholonomic 3-D mobile robots with kinematic constraints. IEEE Trans. on Robotics, 2015, 31 (6): 1537- 1547.
doi: 10.1109/TRO.2015.2482078 |
| 58 |
COHEN I, EPSTEIN C, SHIMA T On the discretized dubins traveling salesman problem. IISE Transactions, 2017, 49 (2): 238- 254.
doi: 10.1080/0740817X.2016.1217101 |
| [1] | Guangwei WANG, Le YANG, Zhikun TAN, Yichen LI, Wenbin YU. Hybrid path planning for USVs using improved A* and DWA [J]. Journal of Systems Engineering and Electronics, 2026, 37(1): 45-63. |
| [2] | Minghao LI, An ZHANG, Wenhao BI, Qiucen FAN, Pan YANG. Mission capability assessment of UAV swarms based on UAF and interval-valued spherical fuzzy ANP [J]. Journal of Systems Engineering and Electronics, 2026, 37(1): 225-241. |
| [3] | Xiaoduo LI, He LUO, Guoqiang WANG, Youlong YIN. Improved simulated annealing algorithm for UAV path planning with uncertain flight time [J]. Journal of Systems Engineering and Electronics, 2026, 37(1): 272-286. |
| [4] | Zhiyong SONG, Yuntao XU. Long time hybrid integration of radar rotating target [J]. Journal of Systems Engineering and Electronics, 2025, 36(6): 1477-1487. |
| [5] | Meigen HUANG, Tao WANG, Tian JING, Song YANG, Xin ZHOU, Hua HE. Case-based reasoning of operation strategies recommendation for UAV swarm [J]. Journal of Systems Engineering and Electronics, 2025, 36(6): 1548-1561. |
| [6] | Wenrui DING, Xiaorong ZHANG, Yufeng WANG, Qingyi LIU, Fuyuan MA. A review on fission-fusion behavior in unmanned aerial vehicle swarm systems [J]. Journal of Systems Engineering and Electronics, 2025, 36(5): 1216-1234. |
| [7] | Zhenlin ZHOU, Teng LONG, Jingliang SUN, Junzhi LI. Hierarchical cooperative path planning method using three-dimensional velocity-obstacle strategy for multiple fixed-wing UAVs [J]. Journal of Systems Engineering and Electronics, 2025, 36(5): 1342-1352. |
| [8] | Linmeng WANG, Yuhui WANG, Mou CHEN, Shulin DING. Multi-round dynamic game decision-making of UAVs based on decision tree [J]. Journal of Systems Engineering and Electronics, 2025, 36(4): 1006-1016. |
| [9] | Delong WU, Hao FANG, Yiren HAO, Aobo WANG. Outdoor navigation of millimeter-wave radar quadrotors based on optimal virtual tube [J]. Journal of Systems Engineering and Electronics, 2025, 36(4): 1057-1067. |
| [10] | Xunhua DAI, Jinhu TU, Quan QUAN. RflySim ToolChain: a rapid development and validation toolchain for intelligent unmanned swarm systems [J]. Journal of Systems Engineering and Electronics, 2025, 36(4): 1077-1093. |
| [11] | Hongen LI, Shilong LI, Qi WANG, Xiaoming HUANG. AUV 3D path planning based on improved PSO [J]. Journal of Systems Engineering and Electronics, 2025, 36(3): 854-866. |
| [12] | Jingfeng GUO, Rui SONG, Shiwei HE. Aerial-ground collaborative delivery route planning with UAV energy function and multi-delivery [J]. Journal of Systems Engineering and Electronics, 2025, 36(2): 446-461. |
| [13] | Gang LIU, Xinyuan GUO, Dong HUANG, Kezhong CHEN, Wu LI. Multi-platform collaborative MRC-PSO algorithm for anti-ship missile path planning [J]. Journal of Systems Engineering and Electronics, 2025, 36(2): 494-509. |
| [14] | Yuelong LUO, Xiuqiang JIANG, Suchuan ZHONG, Yuandong JI. Air-to-ground reconnaissance-attack task allocation for heterogeneous UAV swarm [J]. Journal of Systems Engineering and Electronics, 2025, 36(1): 155-175. |
| [15] | Jingfeng GUO, Rui SONG, Shiwei HE. Vehicle and onboard UAV collaborative delivery route planning: considering energy function with wind and payload [J]. Journal of Systems Engineering and Electronics, 2025, 36(1): 194-208. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||